一种仿生手臂的制作方法
1.本实用新型涉及仿生机器人技术领域,尤其涉及一种仿生手臂。
背景技术:
2.随着社会的不断发展,仿生机器人行业得到了蓬勃发展,仿生机器人是一种具有高智能的机器,其通过中央处理器进行操控,仿生机器人在工作时需要一种仿生手臂结构,仿生手臂是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取或操作工具的自动操作装置。
3.传统的仿生手臂结构其手臂灵活度有限,无法模仿真人的各种手臂操作;尤其在汽车检测过程中,现有的仿生手臂结构不能模拟驾驶员手臂的所有自由度,无法达到试验需求。
技术实现要素:
4.针对现有技术存在的上述不足,本实用新型所要解决的技术问题在于,提出一种可模拟人手所有自由度的仿生手臂。
5.本实用新型解决其技术问题采用的技术方案是,提出一种仿生手臂,包括有:
6.肩关节;
7.大臂,包括连接座和主体,所述连接座可前后转动地设置在所述肩关节上,所述主体可左右转动地设置在所述连接座上;且所述大臂包括可转动连接的第一臂和第二臂,所述第一臂和所述第二臂始终在同一直线方向上;
8.小臂,包括可转动连接的第三臂和第四臂,所述第三臂与所述第二臂可转动连接;且所述第三臂和所述第四臂始终在同一直线方向上;
9.手掌,可转动地设置在所述第四臂上。
10.进一步地,所述肩关节上设有第一转轴和用于驱动所述第一转轴转动的第一电机,所述连接座的一端与所述第一转轴相连;所述第一臂上设有第二转轴和用于驱动所述第一臂转动的第二电机,所述连接座套设在所述第二转轴上。
11.进一步地,所述第一转轴与所述第二转轴呈垂直设置。
12.进一步地,所述第一臂上设有第一固定盘,所述第二臂上设有第二固定盘和设置在所述第二固定盘上的第三电机,所述第三电机的输出轴与所述第一固定盘相连,以驱动所述第二固定盘相对所述第一固定盘转动。
13.进一步地,所述第三臂上设有固定座,所述第二臂上设有第四电机,所述第四电机的输出轴与所述固定座相连,以驱动所述第三臂绕所述第四电机的输出轴转动。
14.进一步地,所述第三臂上设有第三固定盘和第五电机,所述第四臂上设有第四固定盘,所述第五电机的输出轴与所述第四固定盘相连。
15.进一步地,所述第四臂上设有第三转轴和用于驱动所述第三转轴转动的第六电机,所述手掌设置在所述第三转轴上。
16.进一步地,所述肩关节包括相连的安装座和连接套,所述连接套套设在所述连接座上,所述第一电机设置在所述安装座上,所述第一电机的输出轴穿设在所述连接套中。
17.与现有技术相比,本实用新型至少具有以下有益效果:
18.本实用新型中,该仿生手臂包括依次可转动连接的肩关节、大臂、小臂及手掌,手臂整体通过该肩关节用于与机器人的肩部连接,大臂可相对肩关节前后、左右转动,进而实现手臂的摆动和张合,且大臂由第一臂和第二臂可转动连接而成,以实现第二臂和小臂整体转动;同时,小臂由可转动连接的第三臂和第四臂组成,通过第四臂的转动可实现手掌的翻转,从而模拟真人手臂的所有自由度,以满足汽车试验中驾驶需求。
附图说明
19.图1为本实用新型仿生手臂的结构示意图;
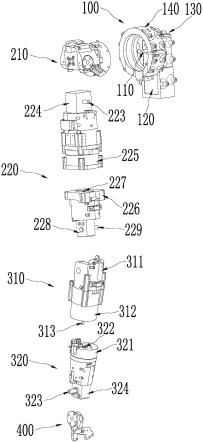
20.图2为图1的爆炸图;
21.图3为图2的进一步爆炸图。
22.图中:
23.100、肩关节;110、第一转轴;120、第一电机;130、安装座;140、连接套;200、大臂;210、连接座;220、主体;221、第一臂;222、第二臂;223、第二转轴;224、第二电机;225、第一固定盘;226、第二固定盘;227、第三电机;228、第四电机;229、第四电机的输出轴;300、小臂;310、第三臂;311、固定座;312、第三固定盘;313、第五电机;320、第四臂;321、第四固定盘;322、连接部;323、第三转轴;324、第六电机;400、手掌。
具体实施方式
24.以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
25.如图1-图3所示,一种仿生手臂,包括有:肩关节100;大臂200,包括连接座210和主体220,所述连接座210可前后转动地设置在所述肩关节100上,所述主体220可左右转动地设置在所述连接座210上;且所述大臂200包括可转动连接的第一臂221和第二臂222,所述第一臂221和所述第二臂222始终在同一直线方向上;小臂300,包括可转动连接的第三臂310和第四臂320,所述第三臂310与所述第二臂222可转动连接;且所述第三臂310和所述第四臂320始终在同一直线方向上;手掌400,可转动地设置在所述第四臂320上。
26.具体地,肩关节100用于与仿生机器人的肩部连接,大臂200主体220通过连接座210连接在肩关节100上,且连接座210可绕肩关节100前后转动,即实现大臂200的摆动,同时主体220可绕连接座210转动,实现大臂200的左右转动,即实现大臂200的张合;其中,可转动连接的第一臂221和第二臂222,使得第二臂222及与第二臂222连接的小臂300整体可绕第一臂221转动,进而实现小臂300的摆动;可转动连接的大臂200和小臂300实现小臂300的转动,以调节大臂200与小臂300之间的夹角大小;小臂300由可转动连接的第三臂310和第四臂320组成,进而实现与第四臂320相连的手掌400的翻转,同时手掌400可转动地设置在第四臂320上,进而手掌400的转动,以完成拍打动作;即整个手臂结构可模拟真人的所有自由度。
27.本实施例中,所述肩关节100上设有第一转轴110和用于驱动所述第一转轴110转
动的第一电机120,所述连接座210的一端与所述第一转轴110相连;所述第一臂221上设有第二转轴223和用于驱动所述第一臂221转动的第二电机224,所述连接座210套设在所述第二转轴223上。实际使用时,连接座210通过第一转轴110连接在肩关节100上,且连接座210固定于第一转轴110上,通过第一转轴110的转动即可驱动连接座210及主体220转动;在第二电机224的驱动下,使第一臂221绕第二转轴223转动,进而实现主体220整体左右转动;较佳地,所述第一转轴110与所述第二转轴223呈垂直设置,以实现主体220在不同的方向上转动,且通过第一电机120和第二电机224的配合可实现主体220任意角度的转动。
28.其中,第一臂221上设有第一固定盘225,所述第二臂222上设有第二固定盘226和设置在所述第二固定盘226上的第三电机227,所述第三电机227的输出轴与所述第一固定盘225相连,以驱动所述第二固定盘226相对所述第一固定盘225转动。实际使用时,第一固定盘225作为第二电机224的安装载体,且第一固定盘225和第二固定盘226之间通过第三电机227的输出轴相连,在第三电机227的驱动下可驱动第二臂222绕第一臂221的周向转动,实现第二臂222及连接在第二臂222上的小臂300的翻转。
29.第三臂310上设有固定座311,所述第二臂222上设有第四电机228,所述第四电机228的输出轴229与所述固定座311相连,以驱动所述第三臂310绕所述第四电机的输出轴229转动。实际安装时,该第四电机228安装在第二固定盘226上,第三臂310固定在第四电机的输出轴229上,通过第四电机的输出轴229的转动即可实现第三臂310的转动,即实现大臂200与小臂300之间的弯曲。
30.第三臂310上还设有第三固定盘312和第五电机313,所述第四臂320上设有第四固定盘321,所述第五电机313的输出轴与所述第四固定盘321相连。该第三固定盘312与固定座311相连,第五电机313安装在第三固定盘312上,第四固定盘321通过其连接部322与第五电机313的输出轴相连,进而使第四固定盘321可相对第三固定盘312转动,实现第四臂320及手掌400的翻转。
31.第四臂320上设有第三转轴323和用于驱动所述第三转轴323转动的第六电机324,所述手掌400设置在所述第三转轴323上。即手掌400通过第三转轴323连接在第四臂320上,通过第六电机324的驱动以实现手掌400的转动,该转动可模拟真人拍打、下压动作。
32.优选地,所述肩关节100包括相连的安装座130和连接套140,所述连接套140套设在所述连接座210上,所述第一电机120设置在所述安装座130上,所述第一电机120的输出轴穿设在所述连接套140中。即实际安装时,第一电机120套设于安装座130内,安装座130用于与机器人的肩部连接,连接套140的设置可对连接座210与第一转轴110连接部322分进行遮盖,提升美观度。
33.本方案中,该仿生手臂整体结构设计合理,通过在各臂节中设置电机,以使仿生手臂具有真人手臂的所有自由度,已完成一些精细操作,且满足汽车试验中驾驶机器人手臂需求。
34.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
35.另外,在本实用新型中如涉及“第一”、“第二”、“一”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定
有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
36.在本实用新型中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
37.另外,本实用新型各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1