自适应动态带电作业旁路承载平台调平成套装置的制作方法
本技术涉及承载平台,尤其涉及自适应动态带电作业旁路承载平台调平成套装置。
背景技术:
1、带电作业过程中通常使用的工器具种类较多,通常使用车辆运输至施工现场,将工器具从承载车辆上卸下后将车辆驶离,由于作业现场条件限制,若将所有工器具平铺放在路面上将占用较大的地面面积,在很多作业现场往往不具备这样的条件,所以就需要一种承载平台来放置这些器具。
2、现有的,如中国专利号:cn 214924236 u中一种带电作业工器具放置平台,属于工具放置平台技术领域,本实用新型是由平板、挂板和放置槽构成;所述平板的上表面均匀焊接有两个挂板,所述放置槽均匀开设在平板的表面,所述平板靠近挂板的一侧均匀开设有卡槽,所述卡槽呈圆形,所述平板的上面均匀开设有矩形槽,所述挂板的表面开设有收纳槽,所述收纳槽的内壁固定连接有弹簧,所述弹簧远离收纳槽的一端固定连接有压板,所述压板呈矩形状。本实用新型解决了传统放置平台与高空架子之间的固定效果较差,并且操作较为繁琐,不方便维修人员及时使用,固定效果较差还会导致维修工具或磁性套筒从高空掉落,增大了安全隐患的问题。
3、上述专利中,虽然该装置解决了传统放置平台与高空架子之间的固定效果较差,并且操作较为繁琐,不方便维修人员及时使用,固定效果较差还会导致维修工具或磁性套筒从高空掉落,增大了安全隐患的问题,但是该装置无法调整承载平台的高度,也无法调整承载平台的水平,避免平台倾倒产生事故,现有的调平手段都是基于手动通过作业人员的感官感知平台的相对对平度,然后通过寻找新的支撑位置,以及增加、减少垫块高度来实现,这种手段一方面调平过程不够准确,且耗时较长。
技术实现思路
1、本实用新型的目的是为了解决现有技术中装置无法调整承载平台的高度,也无法调整承载平台的水平,避免平台倾倒产生事故,现有的调平手段都是基于手动通过作业人员的感官感知平台的相对对平度,然后通过寻找新的支撑位置,以及增加、减少垫块高度来实现,这种手段一方面调平过程不够准确,且耗时较长的问题。
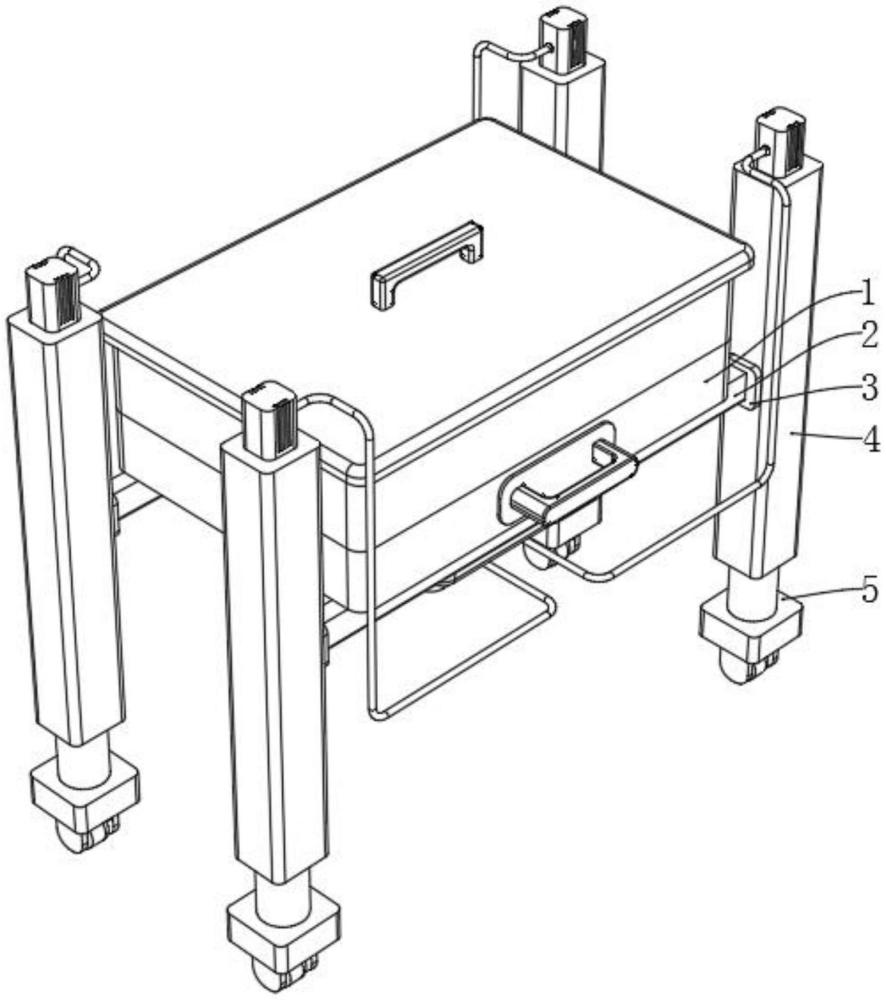
2、为了实现上述目的,本实用新型采用了如下技术方案:自适应动态带电作业旁路承载平台调平成套装置,包括承载平台,所述承载平台的底部固定安装有两个支撑杆,两个所述支撑杆的外壁两端均固定安装有加强板,四个所述加强板的外壁一侧均固定安装有液压杆,四个所述液压杆的底部均固定安装有支撑板,两个所述支撑杆的底部固定安装有底板,所述底板的底部固定安装有plc控制器,所述plc控制器的输出端固定连接有一组控制线,且每个控制线分别连接在每个液压杆的输入端,所述plc控制器的底部固定安装有平衡传感器。
3、优选的,所述承载平台的顶部开设有一组圆孔,一组所述圆孔的内表壁均活动插设有金属杆,一组所述金属杆的外表壁之间固定套设有加长筒,方便在加长筒的作用下,增加装置的使用空间。
4、优选的,所述承载平台的外壁两侧均固定安装有固定板,两个所述固定板的外壁一侧均固定安装有把手,方便在把手的作用下,拉动整个装置。
5、优选的,所述加长筒的内表壁活动插设有矩形框,所述矩形框的顶部固定安装有顶盖,方便在顶盖的作用下,防止雨水对设备进行侵袭。
6、优选的,所述顶盖的顶部固定安装有握把,方便在握把的作用下,拉动顶盖。
7、优选的,四个所述支撑板的底部均固定安装有圆板,且每个圆板的底部均固定安装有万向轮,方便在万向轮的作用下,移动整个装置。
8、与现有技术相比,本实用新型的优点和积极效果在于,
9、1、本实用新型中,通过液压杆可以任意调节装置的高度,平衡传感器可以检测到当前装置的平衡状态,然后通过plc控制器来控制每条液压杆的高度,从而完成对装置平衡度的调节,调节精度较高,速度较快,就不需要寻找新的支撑位置,以及增加、减少垫块高度来实现装置的平衡高度,综上就解决了上述背景中所提出的问题。
10、2、本实用新型中,通过加长筒,可以增加承载平台的高度,从而能增加承载平台的使用面积,通过顶盖就能防止雨水对设备进行侵袭,增加装置的安全性。
技术特征:
1.自适应动态带电作业旁路承载平台调平成套装置,其特征在于:包括承载平台(1),所述承载平台(1)的底部固定安装有两个支撑杆(2),两个所述支撑杆(2)的外壁两端均固定安装有加强板(3),四个所述加强板(3)的外壁一侧均固定安装有液压杆(4),四个所述液压杆(4)的底部均固定安装有支撑板(5),两个所述支撑杆(2)的底部固定安装有底板(6),所述底板(6)的底部固定安装有plc控制器(7),所述plc控制器(7)的输出端固定连接有一组控制线(8),且每个控制线(8)分别连接在每个液压杆(4)的输入端,所述plc控制器(7)的底部固定安装有平衡传感器(9)。
2.根据权利要求1所述的自适应动态带电作业旁路承载平台调平成套装置,其特征在于:所述承载平台(1)的顶部开设有一组圆孔(10),一组所述圆孔(10)的内表壁均活动插设有金属杆(11),一组所述金属杆(11)的外表壁之间固定套设有加长筒(12)。
3.根据权利要求1所述的自适应动态带电作业旁路承载平台调平成套装置,其特征在于:所述承载平台(1)的外壁两侧均固定安装有固定板(13),两个所述固定板(13)的外壁一侧均固定安装有把手(14)。
4.根据权利要求2所述的自适应动态带电作业旁路承载平台调平成套装置,其特征在于:所述加长筒(12)的内表壁活动插设有矩形框(15),所述矩形框(15)的顶部固定安装有顶盖(16)。
5.根据权利要求4所述的自适应动态带电作业旁路承载平台调平成套装置,其特征在于:所述顶盖(16)的顶部固定安装有握把(17)。
6.根据权利要求1所述的自适应动态带电作业旁路承载平台调平成套装置,其特征在于:四个所述支撑板(5)的底部均固定安装有圆板(18),且每个圆板(18)的底部均固定安装有万向轮(19)。
技术总结
本技术提供的自适应动态带电作业旁路承载平台调平成套装置,涉及承载平台技术领域,包括承载平台,承载平台的底部固定安装有两个支撑杆,两个支撑杆的外壁两端均固定安装有加强板,四个加强板的外壁一侧均固定安装有液压杆,四个液压杆的底部均固定安装有支撑板,两个支撑杆的底部固定安装有底板。通过液压杆可以任意调节装置的高度,平衡传感器可以检测到当前装置的平衡状态,然后通过PLC控制器来控制每条液压杆的高度,从而完成对装置平衡度的调节,调节精度较高,速度较快,就不需要寻找新的支撑位置,以及增加、减少垫块高度来实现装置的平衡高度。
技术研发人员:冷昌霖,廖红兵,白杨,郑和平,罗明杰,罗柱钦,袁伟明,蒲武,刘东,苟承志
受保护的技术使用者:绵阳启明星集团有限公司
技术研发日:20221107
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!