嵌入式电池安装结构及具有该结构的人形机器人的制作方法
嵌入式电池安装结构及具有该结构的人形机器人
1.本实用新型涉及机器人技术领域,尤其涉及一种嵌入式电池安装结构及具有该结构的人形机器人。
背景技术:
2.机器人(robot)是一种能够半自主或全自主工作的智能机器;机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围;随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透。结合这些领域的应用特点,人们发展了各式各样的具有感知、决策、行动和交互能力的特种机器人和各种智能机器人。现在虽然还没有一个严格而准确的机器人定义,但是我们希望对机器人的本质做些把握:机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类的工作。它是高级整合控制论、机械电子、计算机、材料和仿生学的产物,在工业、医学、农业、服务业、建筑业甚至军事等领域中均有重要用途。
3.现有技术中,人形机器人的电池包通常通过两块夹板安装于胸腔外部,无法有效充分利用胸腔内部的空间,这种安装方式会使得机器人的中心向外偏移,同时还存在前胸外壳过大以及电池无法做大的问题,故亟需一种新的人形机器人结构以解决现有技术中的缺陷和不足。
技术实现要素:
4.针对上述技术中存在的不足之处,本实用新型提供一种嵌入式电池安装结构及具有该结构的人形机器人,通过设置安装口进行电池包的安装,电池包能够将一部分体积内嵌安装于在胸腔内部,取代现有的电池包安装结构,使可装的电池包可以更大,同时结构之间配合更加紧密。
5.为实现上述目的,本实用新型提供一种嵌入式电池安装结构,包括前胸板和安装板,所述前胸板开设有一个用于安装电池包的安装口,所述安装口的各个边缘均设有用于连接电池包的安装板;所述前胸板一面安装有用于前胸外壳,所述前胸外壳完全覆盖所述电池包。
6.作为优选,所述安装板包括设于上下两侧的顶板和底板以及设于左右两侧的左侧板和右侧板,所述顶板和所述底板的连接孔为多个间隔排列的圆形孔,所述左侧板和所述右侧板的连接孔为沿长度方向设置的条形孔。
7.作为优选,所述前胸板的两侧边均设有第一连接板,所述前胸外壳的两侧边均设有用于与第一连接板连接的第二连接板,当所述前胸外壳与所述前胸板连接时,所述前胸外壳完全覆盖所述前胸板。
8.作为优选,所述前胸外壳为拱形结构,当所述前胸外壳与所述前胸板连接时,前胸外壳与前胸板之间形成用于容置电池包的容置腔结构。
9.本技术还公开了一种人型机器人,包括躯干和对称设置于所述躯干两侧的左手臂、右手臂,以及对称设置于所述躯干底部两侧的左腿、右腿;所述左手臂、右手臂、左腿和右腿的各个关节位置均设有舵机,形成多自由度的转动结构,所述躯干内设有上文任一项所述的嵌入式电池安装结构。
10.作为优选,所述左手臂、右手臂、左腿和右腿的各个关节位置形成至少20个自由度的转动结构。
11.作为优选,所述左手臂、所述右手臂、所述左腿和所述右腿各实现5个自由度的转动结构。
12.作为优选,所述躯干顶部通过舵机连接有头部,所述头部设有图像传感器。
13.本实用新型的有益效果是:与现有技术相比,本实用新型提供的嵌入式电池安装结构及具有该结构的人形机器人,包括躯干和对称设置于躯干两侧的左手臂、右手臂,以及对称设置于躯干底部两侧的左腿、右腿;左手臂、右手臂、左腿和右腿的各个关节位置均设有舵机,形成多自由度的转动结构;躯干的前侧设有前胸板,前胸板开设有一个用于安装电池包的安装口,安装口的各个边缘均设有用于连接电池包的安装板;前胸板远离躯干的内腔一面安装有用于前胸外壳,前胸外壳完全覆盖电池包;通过设置安装口进行电池包的安装,电池包能够将一部分体积内嵌安装于在胸腔内部,使得电池包重心与机器人本身的重心最大程度的重叠,前胸外壳的体积也可以相应减小,使得机器人整体更加美观,使可装的电池包大小可以更大。
附图说明
14.图1为本实用新型的立体图;
15.图2为本实用新型的爆炸视图;
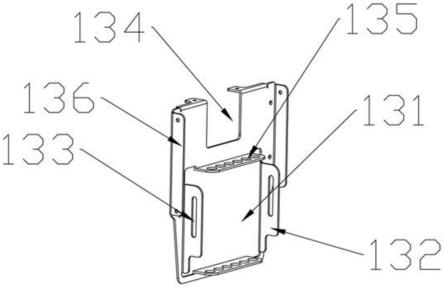
16.图3为本实用新型的前胸板示意图;
17.图4为本实用新型的散热板示意图;
18.图5为本实用新型的前胸外壳示意图。
19.主要元件符号说明如下:
20.1、躯干;11、前胸外壳;111、散热孔;112、第二连接板;12、电池包;13、前胸板;131、安装口;132、安装板;133、条形孔;134、减重口;135、圆形孔;136、第一连接板;14、散热板;141、散热风扇; 15.胸腔 2、左手臂;3、右手臂;4、左腿;5、右腿;6、头部;7、舵机。
具体实施方式
21.为了更清楚地表述本实用新型,下面结合附图对本实用新型作进一步地描述。
22.在下文描述中,给出了普选实例细节以便提供对本实用新型更为深入的理解。显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部实施例。应当理解所述具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
23.应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在所述特征、整体、步骤、操作、元件或组件,但不排除存在或附加一个或多个其他特征、整体、步骤、操作、元件、组件或它们的组合。
24.现有技术中,人形机器人的电池包12通常通过两块夹板安装于胸部位置,这种安
装方式会使得机器人的中心向外偏移,同时还存在散热不佳以及电池无法做大的问题,故亟需一种新的人形机器人结构以解决现有技术中的缺陷和不足。
25.为解决现有技术中的缺陷和不足,本实用新型提供一种具有嵌入式电池安装结构的人形机器人,请参阅图1-图5,包括躯干1和对称设置于躯干1两侧的左手臂2、右手臂3,以及对称设置于躯干1底部两侧的左腿4、右腿5;左手臂2、右手臂3、左腿4和右腿5的各个关节位置均设有舵机7,形成多自由度的转动结构;躯干1的内部具有胸腔15,胸腔的前侧设有前胸板13,前胸板13开设有一个用于安装电池包12的安装口131,安装口131的各个边缘均设有用于连接电池包12的安装板132;前胸板13远离躯干1的内腔一面安装有用于前胸外壳11,前胸外壳11完全覆盖电池包12;左手臂2、右手臂3、左腿4和右腿5通过舵机7和躯干1连接,而左手臂2、右手臂3、左腿4和右腿5还包括类似人体手部和脚部的多个躯体,而在多个躯体之间设置舵机7充当关节的转动结构,多个关节之间就形成了类似人体转动的多个自由度的转动结构;在人形机器人中,躯干1通常为电池包12的最佳安装位置,而通常都是设置一个电池安装板132进行电池的安装,如此设置由于电池包12会对机器人整体的重心产生影响,故通常电池包12的体积大小会受到较大的限制,在本实施例中,设置的安装口为通孔型结构,与舵机相连通,安装口用于电池包的安装,这样电池包12的侧边嵌入至安装孔内,可与舵机相贴合,能够做到电池包12一半体积在躯干1内,一半在躯干1外,将电池包12的重量尽可能往中间靠,从而使电池包12的重心与机器人本身的重心最大程度的重叠;保证重心稳定,同时提供了更大的电池包12安装空间保证可以使用并安装更大体积和容量的电池包12;安装后通过前胸外壳11将电池板进行隐藏;同时在前胸板上开设有多个减重孔135,能够在确保连接强度的同时降低前胸板的质量,从而使得整体结构的质量更低,设备运动时负担更小。
26.在本实施例中提及:安装板132凸出于前胸板13表面,安装板132的表面均开设有用于电池包12通过螺钉连接的连接孔;连接孔设有多个,与安装板132一起实现电池包12的安装固定。
27.在一个优选的实施例中提及:安装板132包括设于上下两侧的顶板和底板以及设于左右两侧的左侧板和右侧板,顶板和底板的连接孔为多个间隔排列的圆形孔135,左侧板和右侧板的连接孔为沿长度方向设置的条形孔133;圆形孔135能够对电池包12进行点对点的固定连接,而条形孔133能够选取任意位置进行螺钉的安装连接,从而保证根据电池包12的大小进行选择性的固定安装。
28.在本实施例中提及:前胸板13的两侧边均设有第一连接板136,前胸外壳11的两侧边均设有用于与第一连接板136连接的第二连接板112,当前胸外壳11与前胸板13连接时,前胸外壳11完全覆盖前胸板13;前胸外壳11与前胸板13之间通过第一连接板136和第二连接板112进行连接,连接后前胸外壳11完全覆盖前胸板13首先可以对电池包12起到隐藏保护作用,其次是保证机器人整体的美观程度。
29.在一个优选的实施例中提及:前胸外壳11为拱形结构,当前胸外壳11与前胸板13连接时,前胸外壳11与前胸板13之间形成用于容置电池包12的容置腔结构;拱形结构能够保证电池包12具有足够的内部储存空间。
30.在本实施例中提及:躯干1内还设有散热板14,散热板14正对电池包12的位置安装有散热风扇141,散热风扇141的出风口正对电池包12,散热风扇141能够对电池包12进行有
效的散热,从而减小电池工作的温度负担,提升电池的使用效率。
31.在一个优选的实施例中提及:前胸外壳11表面开设有多个散热孔111,散热孔111能够将散热风扇141吹出的热量排出躯干1,从散热孔111排出形成散热通道,实现良好的散热效果。
32.在本实施例中提及:左手臂2、右手臂3、左腿4和右腿5的各个关节位置形成至少20个自由度的转动结构;高达20个自由度能够保证人形机器人能够完成普通机器人无法实现的更多体位和更多动作。
33.在一个优选的实施例中提及:左手臂2、右手臂3、左腿4和右腿5各实现5个自由度的转动结构;5个自由度的手臂能够实现包括抬手、转动手臂以及手部抓取物品的动作;5个自由度的腿能够实现左右腿5分开独立式控制,包括抬腿、步行、弯腿、下蹲等动作。
34.在本实施例中提及:躯干1顶部通过舵机7连接有头部6,头部6设有图像传感器;舵机7连接头部6可以使头部6能够转动,同时设置的图像传感器能够进行图像捕捉后进行分析。
35.本实用新型的优势在于:
36.1、通过设置安装口进行电池包的安装,电池包能够安装于躯干与外部之间,取代现有的电池包安装结构,使可装的电池包大小可以更大。
37.2、同时设置散热组件和相应的散热结构以达到更好的散热效果,具有较强的推广价值。
38.以上公开的仅为本实用新型的几个具体实施例,但是本实用新型并非局限于此,任何本领域的技术人员能思之的变化都应落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1