一种医用分拣机器人
1.本实用新型涉及医用器械、智能机器人领域,具体而言,涉及一种医用分拣机器人。
背景技术:
2.医疗器械与医疗废物作为疫情传播的风险点,分装时必须由具备良好隔离条件,同时需填机器人频繁地装取,分拣机器人具有自动开关盖功能,减少医护人员手动开关盖等冗余工作,同时能为医疗防具和医疗废物分类提供动态隔离环境,提高工作效率,降低感染风险。
3.现有的分拣机器人由于各模块的位置布置不合理,易在分拣工作或者跟随状态下与环境物品或行人发生碰撞,造成二次污染。
4.因此,需要一种或多种方法解决上述问题。
5.需要说明的是,在上述背景技术部分公开的信息仅用于加强对本实用新型的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现要素:
6.本实用新型的目的在于提供一种医用分拣机器人,进而至少在一定程度上克服由于相关技术的限制和缺陷而导致的一个或者多个问题。
7.根据本实用新型的一个方面,提供一种医用分拣机器人,包括车身、激光雷达、深度摄像头、超声波固定板、车轮,其中:
8.所述激光雷达固定安装在所述车身顶板顶部靠近所述车身与所述超声波固定板连接一侧;
9.所述深度摄像头安装在所述车身靠近所述车身与所述超声波固定板连接一侧侧板的顶部;
10.所述超声波固定板安装在所述车身靠近所述车身与所述超声波固定板连接一侧侧板的中部,所述超声波固定板用于固定安装摇杆和曲柄,所述摇杆和曲柄用于基于支持架固定安装超声波模块;
11.所述车轮分别基于轴承固定安装在所述车身底部四角。
12.在本实用新型的一种示例性实施例中,所述医用分拣机器人还包括:
13.所述支持架基于铰接件及滑块固定安装中部超声波模块、两侧超声波模块。
14.在本实用新型的一种示例性实施例中,所述医用分拣机器人还包括:
15.控制板固定板,所述控制板固定板固定安装在所述车身底板上部,所述控制板固定板用于固定安装控制板。
16.在本实用新型的一种示例性实施例中,所述医用分拣机器人还包括:
17.储物板,所述储物板固定安装在所述车身的侧板及底板构筑的储物空间内部,所述储物板用于放置医用物品。
18.在本实用新型的一种示例性实施例中,所述医用分拣机器人还包括:
19.活动门,所述活动门基于铰链固定安装在所述车身顶部,所述活动门用于作为储物空间的顶板。
20.在本实用新型的一种示例性实施例中,所述医用分拣机器人还包括:
21.激光感应传感器,所述激光感应传感器固定安装在所述活动门顶部,所述激光感应传感器用于激光感应控制所述活动门。
22.在本实用新型的一种示例性实施例中,所述医用分拣机器人还包括:
23.显示屏支架,所述显示屏支架用于放置显示屏。
24.本实用新型的示例性实施例中的医用分拣机器人,包括车身、激光雷达、深度摄像头、超声波固定板、车轮,其中:所述激光雷达固定安装在所述车身顶板顶部靠近所述车身与所述超声波固定板连接一侧;所述深度摄像头安装在所述车身靠近所述车身与所述超声波固定板连接一侧侧板的顶部;所述超声波固定板安装在所述车身靠近所述车身与所述超声波固定板连接一侧侧板的中部,所述超声波固定板用于固定安装摇杆和曲柄,所述摇杆和曲柄用于基于支持架固定安装超声波模块;所述车轮分别基于轴承固定安装在所述车身底部四角。本公开通过合理的布置各模块的安装位置,降低了所述医用分拣机器人的各部件碰撞概率,扩展了所述医用分拣机器人的应用场景。
25.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本实用新型。
附图说明
26.通过参照附图来详细描述其示例实施例,本实用新型的上述和其它特征及优点将变得更加明显。
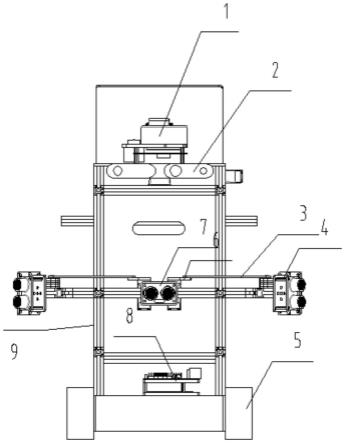
27.图1示出了根据本实用新型一示例性实施例的医用分拣机器人的正视图;
28.图2示出了根据本实用新型一示例性实施例的医用分拣机器人的俯视图;
29.图3示出了根据本实用新型一示例性实施例的医用分拣机器人的结构示意图。
具体实施方式
30.现在将参考附图更全面地描述示例实施例。然而,示例实施例能够以多种形式实施,且不应被理解为限于在此阐述的实施例;相反,提供这些实施例使得本实用新型将全面和完整,并将示例实施例的构思全面地传达给本领域的技术人员。在图中相同的附图标记表示相同或类似的部分,因而将省略对它们的重复描述。
31.此外,所描述的特征、结构或特性可以以任何合适的方式结合在一个或更多实施例中。在下面的描述中,提供许多具体细节从而给出对本实用新型的实施例的充分理解。然而,本领域技术人员将意识到,可以实践本实用新型的技术方案而没有所述特定细节中的一个或更多,或者可以采用其它的方法、组元、材料、装置、步骤等。在其它情况下,不详细示出或描述公知结构、方法、装置、实现、材料或者操作以避免模糊本实用新型的各方面。
32.附图中所示的方框图仅仅是功能实体,不一定必须与物理上独立的实体相对应。即,可以采用软件形式来实现这些功能实体,或在一个或多个软件硬化的模块中实现这些功能实体或功能实体的一部分,或在不同网络和/或处理器装置和/或微控制器装置中实现
这些功能实体。
33.在本示例实施例中,首先提供了一种医用分拣机器人;参考图1中所示,该医用分拣机器人包括车身9、激光雷达1、深度摄像头2、超声波固定板7、车轮5,其中:
34.所述激光雷达1固定安装在所述车身9顶板顶部靠近所述车身9与所述超声波固定板7连接一侧;
35.所述深度摄像头2安装在所述车身9靠近所述车身9与所述超声波固定板7连接一侧侧板的顶部;
36.所述超声波固定板7安装在所述车身9靠近所述车身9与所述超声波固定板7连接一侧侧板的中部,所述超声波固定板7用于固定安装摇杆3和曲柄6,所述摇杆3和曲柄6用于基于支持架4固定安装超声波模块12;
37.所述车轮5分别基于轴承固定安装在所述车身9底部四角。
38.本实用新型的示例性实施例中的医用分拣机器人,包括车身、激光雷达、深度摄像头、超声波固定板、车轮,其中:所述激光雷达固定安装在所述车身顶板顶部靠近所述车身与所述超声波固定板连接一侧;所述深度摄像头安装在所述车身靠近所述车身与所述超声波固定板连接一侧侧板的顶部;所述超声波固定板安装在所述车身靠近所述车身与所述超声波固定板连接一侧侧板的中部,所述超声波固定板用于固定安装摇杆和曲柄,所述摇杆和曲柄用于基于支持架固定安装超声波模块;所述车轮分别基于轴承固定安装在所述车身底部四角。本公开通过合理的布置各模块的安装位置,降低了所述医用分拣机器人的各部件碰撞概率,扩展了所述医用分拣机器人的应用场景。
39.下面,如图2所示,将对本示例实施例中的医用分拣机器人进行进一步的说明。
40.所述医用分拣机器人包括车身9、激光雷达1、深度摄像头2、超声波固定板7、车轮5,其中:
41.所述激光雷达1固定安装在所述车身9顶板顶部靠近所述车身9与所述超声波固定板7连接一侧;
42.所述深度摄像头2安装在所述车身9靠近所述车身9与所述超声波固定板7连接一侧侧板的顶部;
43.所述超声波固定板7安装在所述车身9靠近所述车身9与所述超声波固定板7连接一侧侧板的中部,所述超声波固定板7用于固定安装摇杆3和曲柄6,所述摇杆3和曲柄6用于基于支持架4固定安装超声波模块12;
44.所述车轮5分别基于轴承固定安装在所述车身9底部四角。
45.在本示例的实施例中,所述医用分拣机器人还包括:
46.所述支持架4基于铰接件10及滑块11固定安装中部超声波模块12、两侧超声波模块12。
47.在本示例的实施例中,所述医用分拣机器人还包括:
48.控制板固定板8,所述控制板固定板8固定安装在所述车身9底板上部,所述控制板固定板8用于固定安装控制板。
49.在本示例的实施例中,如图3所示,所述医用分拣机器人还包括:
50.储物板13,所述储物板13固定安装在所述车身9的侧板及底板构筑的储物空间内部,所述储物板13用于放置医用物品。
51.在本示例的实施例中,所述医用分拣机器人还包括:
52.活动门14,所述活动门14基于铰链固定安装在所述车身9顶部,所述活动门14用于作为储物空间的顶板。
53.在本示例的实施例中,所述医用分拣机器人还包括:
54.激光感应传感器17,所述激光感应传感器17固定安装在所述活动门14顶部,所述激光感应传感器17用于激光感应控制所述活动门14。
55.在本示例的实施例中,所述医用分拣机器人还包括:
56.显示屏支架16,所述显示屏支架16用于放置显示屏15。
57.在本示例的实施例中,通过激光雷达来检测车上方障碍物的距离,来控制车速,通过摄像头来识别待分拣物料;通过激光传感器和舵机驱动及活动门构成自动感应装置;通过超声波模块实现目标跟踪功能,曲柄滑块机构能实现超声波模块的收放,当需要使用时,曲柄滑块张开,超声波模块之间保持特定距离,当不用时,曲柄滑块装置回位,超声波模块收缩;超声波模块的周围超声波模块是为了防止超声波模块受损的保护装置,避免超声波因碰撞而损坏;储物板的下方有一定的弹性弹簧,两者构成弹性货箱,能够方便存取货物;该机器人上方是风光互补装置,能够利用清洁能源为机器人补充一定的能量,实现节能减排。
58.应当注意,尽管在上文详细描述中提及了医用分拣机器人的若干模块或者单元,但是这种划分并非强制性的。实际上,根据本实用新型的实施方式,上文描述的两个或更多模块或者单元的特征和功能可以在一个模块或者单元中具体化。反之,上文描述的一个模块或者单元的特征和功能可以进一步划分为由多个模块或者单元来具体化。
59.此外,上述附图仅是根据本实用新型示例性实施例的方法所包括的处理的示意性说明,而不是限制目的。易于理解,上述附图所示的处理并不表明或限制这些处理的时间顺序。另外,也易于理解,这些处理可以是例如在多个模块中同步或异步执行的。
60.本领域技术人员在考虑说明书及实践这里的实用新型后,将容易想到本实用新型的其他实施例。本技术旨在涵盖本实用新型的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本实用新型的一般性原理并包括本实用新型未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本实用新型的真正范围和精神由权利要求指出。
61.应当理解的是,本实用新型并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本实用新型的范围仅由所附的权利要求来限。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1