一种抓取范围可调节的机械手夹抓的制作方法
本技术涉及机械手夹爪,具体为一种抓取范围可调节的机械手夹抓。
背景技术:
1、随着国民经济的飞速发展,物流业的市场需求持续扩大,物流行业保持较快增长速度,物流体系不断完善,目前物料中很多纸箱包装的产品,在生产出货或转运过程中需要进行码垛操作,现在厂家的码垛操作大都依靠机械手进行,提高包装箱码垛的效率。
2、现在机械手进行码垛操作时需要依靠夹爪进行操作,现在夹爪的抓取范围大都固定的,而包装箱的大小不一,范围固定的夹爪适用性不够,更换制造不同的夹爪又提高成本。
3、基于此,本实用新型设计了一种抓取范围可调节的机械手夹抓,以解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种抓取范围可调节的机械手夹抓,以解决上述技术问题。
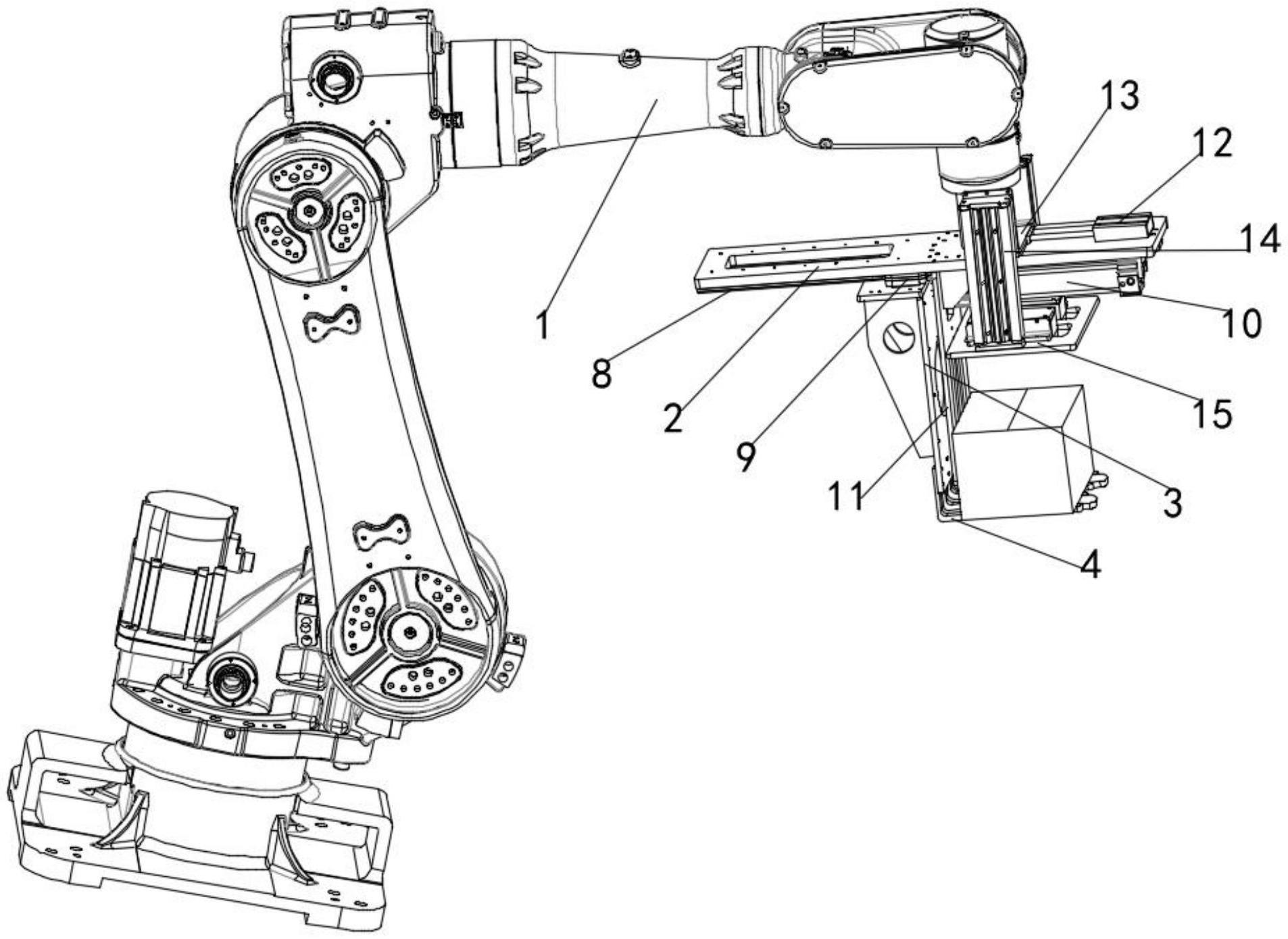
2、为实现上述目的,本实用新型提供如下技术方案:一种抓取范围可调节的机械手夹抓,包括:机械手;所述机械手一端固定连接有顶座,所述顶座底部固定连接有两条相对称的滑轨,两条滑轨的轨道内均滑动连接有滑块,所述滑块底部固定连接有安装板,所述安装板一端分别固定连接有第一组托杆和第二组托杆,所述第一组托杆和第二组托杆均设置为两根相对称的杆件,所述第一组托杆和第二组托杆的两根杆件之间均设置有调节托杆,所述第一组托杆和第二组托杆的两根杆件开设有相对称的螺栓通孔,所述调节托杆外壁依次开设有多个调节通孔,所述第一组托杆和第二组托杆的螺栓通孔与调节托杆的调节通孔之间锁有螺栓。
3、优选的,所述顶座顶部固定连接有第二电缸,所述第二电缸伸缩端传动连接有滑座,所述滑座外壁固定连接有两个相对称的第三电缸。
4、优选的,两个所述第三电缸伸缩端传动连接有压板。
5、优选的,所述顶座底部固定连接有竖直的挡板,所述挡板一端穿插于安装板和压板之间。
6、优选的,所述顶座底部固定连接有第一电缸。
7、优选的,所述第一电缸伸缩端贯穿挡板并与安装板固定连接。
8、与现有技术相比,本实用新型的有益效果为:在对不同大小批次的包装箱进行抓取时,可通过螺栓的快速拆装对调节托杆进行调整,并在抓举时通过第二电缸控制压板移动到合适的下压位置,及时便捷对抓取范围进行调整,适用更多大小批次的包装箱。
技术特征:
1.一种抓取范围可调节的机械手(1)夹抓,包括:机械手(1);其特征在于,所述机械手(1)一端固定连接有顶座(2),所述顶座(2)底部固定连接有两条相对称的滑轨(8),两条滑轨(8)的轨道内均滑动连接有滑块(9),所述滑块(9)底部固定连接有安装板(3),所述安装板(3)一端分别固定连接有第一组托杆(4)和第二组托杆(5),所述第一组托杆(4)和第二组托杆(5)均设置为两根相对称的杆件,所述第一组托杆(4)和第二组托杆(5)的两根杆件之间均设置有调节托杆(6),所述第一组托杆(4)和第二组托杆(5)的两根杆件开设有相对称的螺栓(7)通孔,所述调节托杆(6)外壁依次开设有多个调节通孔,所述第一组托杆(4)和第二组托杆(5)的螺栓(7)通孔与调节托杆(6)的调节通孔之间锁有螺栓(7)。
2.根据权利要求1所述的一种抓取范围可调节的机械手(1)夹抓,其特征在于:所述顶座(2)顶部固定连接有第二电缸(12),所述第二电缸(12)伸缩端传动连接有滑座(13),所述滑座(13)外壁固定连接有两个相对称的第三电缸(14)。
3.根据权利要求2所述的一种抓取范围可调节的机械手(1)夹抓,其特征在于:两个所述第三电缸(14)伸缩端传动连接有压板(15)。
4.根据权利要求1所述的一种抓取范围可调节的机械手(1)夹抓,其特征在于:所述顶座(2)底部固定连接有竖直的挡板(11),所述挡板(11)一端穿插于安装板(3)和压板(15)之间。
5.根据权利要求1所述的一种抓取范围可调节的机械手(1)夹抓,其特征在于:所述顶座(2)底部固定连接有第一电缸(10)。
6.根据权利要求5所述的一种抓取范围可调节的机械手(1)夹抓,其特征在于:所述第一电缸(10)伸缩端贯穿挡板(11)并与安装板(3)固定连接。
技术总结
本技术公开了一种抓取范围可调节的机械手夹抓,属于机械手夹爪技术领域,包括:机械手;所述机械手一端固定连接有顶座,所述顶座底部固定连接有两条相对称的滑轨,两条滑轨的轨道内均滑动连接有滑块,所述滑块底部固定连接有安装板,所述安装板一端分别固定连接有第一组托杆和第二组托杆,所述第一组托杆和第二组托杆均设置为两根相对称的杆件,所述第一组托杆和第二组托杆的两根杆件之间均设置有调节托杆,所述第一组托杆和第二组托杆的两根杆件开设有相对称的螺栓通孔,所述调节托杆外壁依次开设有多个调节通孔,本技术可及时便捷对抓取范围进行调整,适用更多大小批次的包装箱。
技术研发人员:尹海洁,尹永乐,廖忠锦
受保护的技术使用者:厦门迪维斯科技有限责任公司
技术研发日:20221121
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!