一种适用于管材的机械手的制作方法
本技术涉及机械手,特别是一种适用于管材的机械手。
背景技术:
1、机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
2、但是现有的一些适用于管材的机械手根据管材的大小调整抓距时,较为复杂,使用不便,且管材运输中容易从机械手中脱落。
技术实现思路
1、本实用新型的目的旨在至少解决所述技术缺陷之一。
2、为此,本实用新型的一个目的在于提出一种适用于管材的机械手,以解决背景技术中所提到的问题,克服现有技术中存在的不足。
3、为了实现上述目的,本实用新型一方面的实施例提供一种适用于管材的机械手,包括机械臂本体,所述机械臂本体的一侧转动连接有两个机械手,所述机械臂本体的一侧固定连接有第一电机,其中一个所述机械臂本体的一侧转动连接有转动手;
4、所述机械臂本体的两侧均开设有机械手卡槽,所述机械臂本体的一侧开设有齿轮卡槽。
5、由上述任一方案优选的是,所述机械臂本体的一侧开设有两个转动杆卡孔,所述机械臂本体的一侧开设有连接杆卡孔。
6、由上述任一方案优选的是,两个所述机械手的一侧均固定连接有转动杆,两个所述机械手的一侧均开设有卡槽,两个所述机械手的一侧均固定连接有齿牙,其中一个所述机械手的一侧开设有定位杆卡孔。
7、由上述任一方案优选的是,两个所述机械手的外表面转动连接于机械手卡槽的内表面,两个所述转动杆的外表面转动连接于两个转动杆卡孔的内表面。
8、由上述任一方案优选的是,所述第一电机的输出端固定连接有连接杆,所述连接杆的外表面卡接有齿轮,所述连接杆的外表面转动连接于连接杆卡孔的内表面,所述齿轮的外表面转动连接于齿轮卡槽的内表面,所述齿轮的两侧均啮合于齿牙的一侧。
9、由上述任一方案优选的是,所述转动手的一侧固定连接有定位杆,所述定位杆的一侧设置有第二电机,两个所述机械手和转动手的一侧均固定连接有防滑块。
10、本实用新型另一方面的实施例提供一种适用于管材的机械手,包括机械臂本体,所述机械臂本体的一侧转动连接有两个机械手,所述机械臂本体的一侧固定连接有第一电机,其中一个所述机械臂本体的一侧转动连接有转动手;
11、所述机械臂本体的两侧均开设有机械手卡槽,所述机械臂本体的一侧开设有齿轮卡槽。
12、由上述任一方案优选的是,所述第二电机的输出端固定连接于定位杆的一侧,所述定位杆的外表面转动连接于定位杆卡孔的内表面,所述第二电机的一侧固定连接于其中一个机械手的一侧。由上述任一方案优选的是,两个所述机械手的一侧均固定连接有转动杆,两个所述机械手的一侧均开设有卡槽,两个所述机械手的一侧均固定连接有齿牙,其中一个所述机械手的一侧开设有定位杆卡孔,两个所述机械手的一侧均固定连接有橡胶垫。
13、采用上述方案达到的技术效果是:利用橡胶垫增加管材于机械手的接触面积。
14、与现有技术相比,本实用新型所具有的优点和有益效果为:
15、本实用新型通过第一电机带着齿轮转动,机械手上的齿牙与齿轮相捏合,进而第一电机会带着两个机械手调整间距,两个机械手可以根据管材的直径调整相对应的大小,然后第二电机带着转动手转动,转动手穿过管材的一侧,慢慢的带着管材移动到两个机械手中间,进而转动手和两个机械手对管材进行固定,使其可以对不同大小的管材进行夹持,使用方便快捷,解决了适用于管材的机械手根据管材的大小调整抓距时,较为复杂,使用不便的问题。
16、本实用新型附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
技术特征:
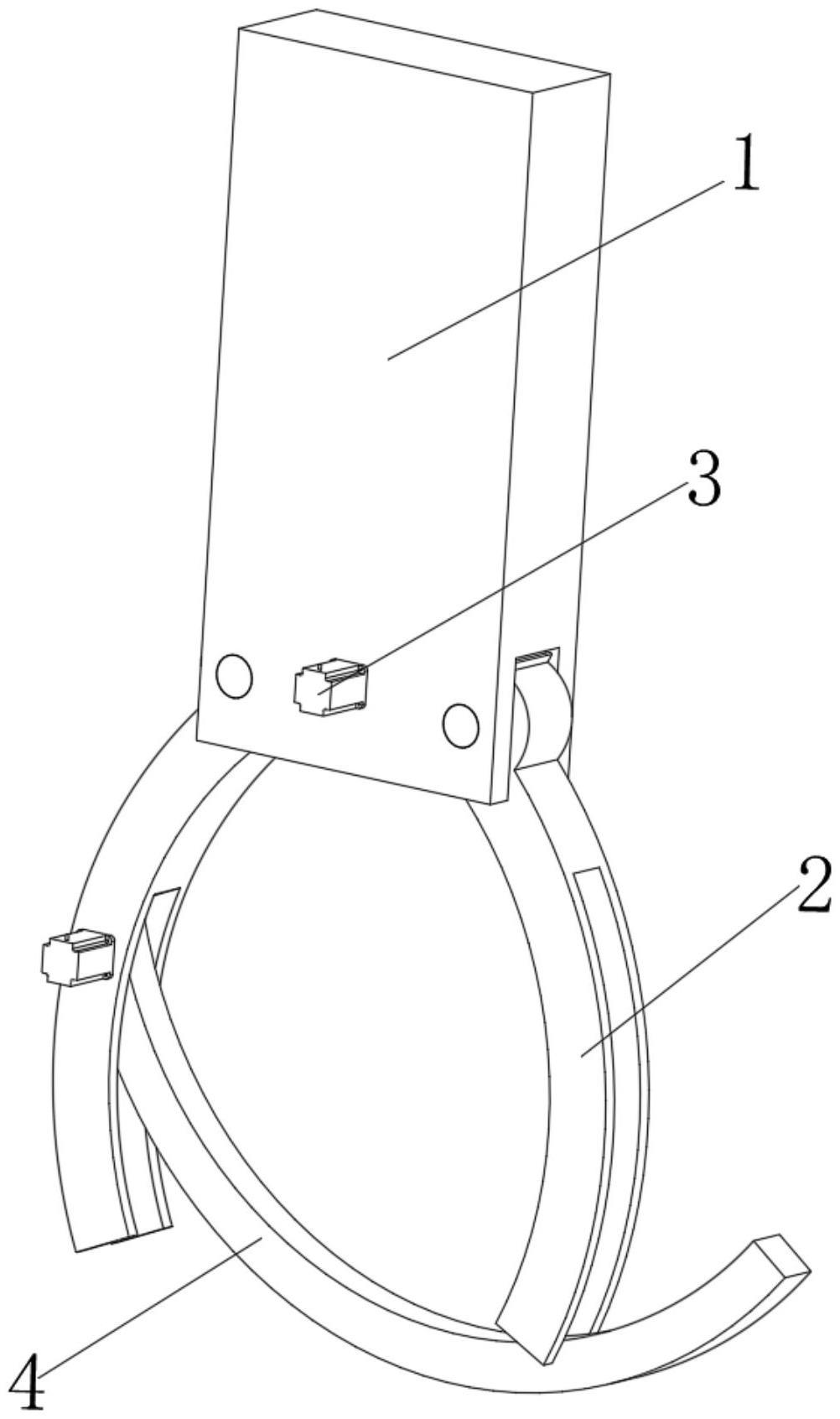
1.一种适用于管材的机械手,其特征在于:包括机械臂本体(1),所述机械臂本体(1)的一侧转动连接有两个机械手(2),所述机械臂本体(1)的一侧固定连接有第一电机(3),其中一个所述机械臂本体(1)的一侧转动连接有转动手(4);
2.根据权利要求1所述的一种适用于管材的机械手,其特征在于:所述机械臂本体(1)的一侧开设有两个转动杆卡孔(13),所述机械臂本体(1)的一侧开设有连接杆卡孔(14)。
3.根据权利要求2所述的一种适用于管材的机械手,其特征在于:两个所述机械手(2)的一侧均固定连接有转动杆(21),两个所述机械手(2)的一侧均开设有卡槽(22),两个所述机械手(2)的一侧均固定连接有齿牙(23),其中一个所述机械手(2)的一侧开设有定位杆卡孔(24)。
4.根据权利要求3所述的一种适用于管材的机械手,其特征在于:两个所述机械手(2)的外表面转动连接于机械手卡槽(11)的内表面,两个所述转动杆(21)的外表面转动连接于两个转动杆卡孔(13)的内表面。
5.根据权利要求4所述的一种适用于管材的机械手,其特征在于:所述第一电机(3)的输出端固定连接有连接杆(31),所述连接杆(31)的外表面卡接有齿轮(32),所述连接杆(31)的外表面转动连接于连接杆卡孔(14)的内表面,所述齿轮(32)的外表面转动连接于齿轮卡槽(12)的内表面,所述齿轮(32)的两侧均啮合于齿牙(23)的一侧。
6.根据权利要求5所述的一种适用于管材的机械手,其特征在于:所述转动手(4)的一侧固定连接有定位杆(41),所述定位杆(41)的一侧设置有第二电机(42),两个所述机械手(2)和转动手(4)的一侧均固定连接有防滑块。
7.根据权利要求6所述的一种适用于管材的机械手,其特征在于:所述第二电机(42)的输出端固定连接于定位杆(41)的一侧,所述定位杆(41)的外表面转动连接于定位杆卡孔(24)的内表面,所述第二电机(42)的一侧固定连接于其中一个机械手(2)的一侧。
技术总结
本技术涉及机械手技术领域,特别是一种适用于管材的机械手,包括机械臂本体,所述机械臂本体的一侧转动连接有两个机械手,所述机械臂本体的一侧固定连接有第一电机,其中一个所述机械臂本体的一侧转动连接有转动手。本技术的优点在于:本技术通过第一电机带着齿轮转动,机械手上的齿牙与齿轮相捏合,进而第一电机会带着两个机械手调整间距,两个机械手可以根据管材的直径调整相对应的大小,然后第二电机带着转动手转动,转动手穿过管材的一侧,慢慢的带着管材移动到两个机械手中间,转动手和两个机械手对管材进行固定,可以对不同大小的管材进行夹持,使用方便快捷,解决了适用于管材的机械手根据管材的大小调整抓距。
技术研发人员:管开来
受保护的技术使用者:力弗特机械设备(上海)有限公司
技术研发日:20221117
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!