一种工业机器人末端执行器的制作方法
本技术工业机器人领域,具体为一种工业机器人末端执行器。
背景技术:
1、在精密机械制造过程中,对工件的抛光打磨等表面接触性后处理是最基础的一道工序,传统的此类工作常由人工来完成。然而,随着劳动力成本越来越高,这种不需要文化技术的岗位,反而占据着很高比重的薪资支出,机械加工业因此裹足不前。随着工业技术不断发展,人们对机械工件的表面打磨、棱角去毛刺等加工过程也提出了更高的要求,因此,采用机械臂替换人工的方式成为连续接触性表面后处理工作中被广泛认同的加工方式之一。
2、现有技术中,在通过机械臂替换人工的方式成为连续接触性表面后处理工作中,通常以吸力或者抓钩进行夹持作用,然而通过吸力吸取物件,由于吸力大小难以调控,会导致在搬运物件发生松动,通过抓钩方式进行,难以将物件从水平面上进行提升,同时当物件厚度较薄且材质较软时,抓钩会挤压物件周边,使物件周边发生形变而产生损害。
3、基于此,本实用新型设计了一种工业机器人末端执行器,以解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种工业机器人末端执行器,以解决上述背景技术中提出了现有技术中,由于吸力大小难以调控,会导致在搬运物件发生松动,通过抓钩方式进行,难以将物件从水平面上进行提升,同时当物件厚度较薄且材质较软时,抓钩会挤压物件周边,使物件周边发生形变而产生损害的问题。
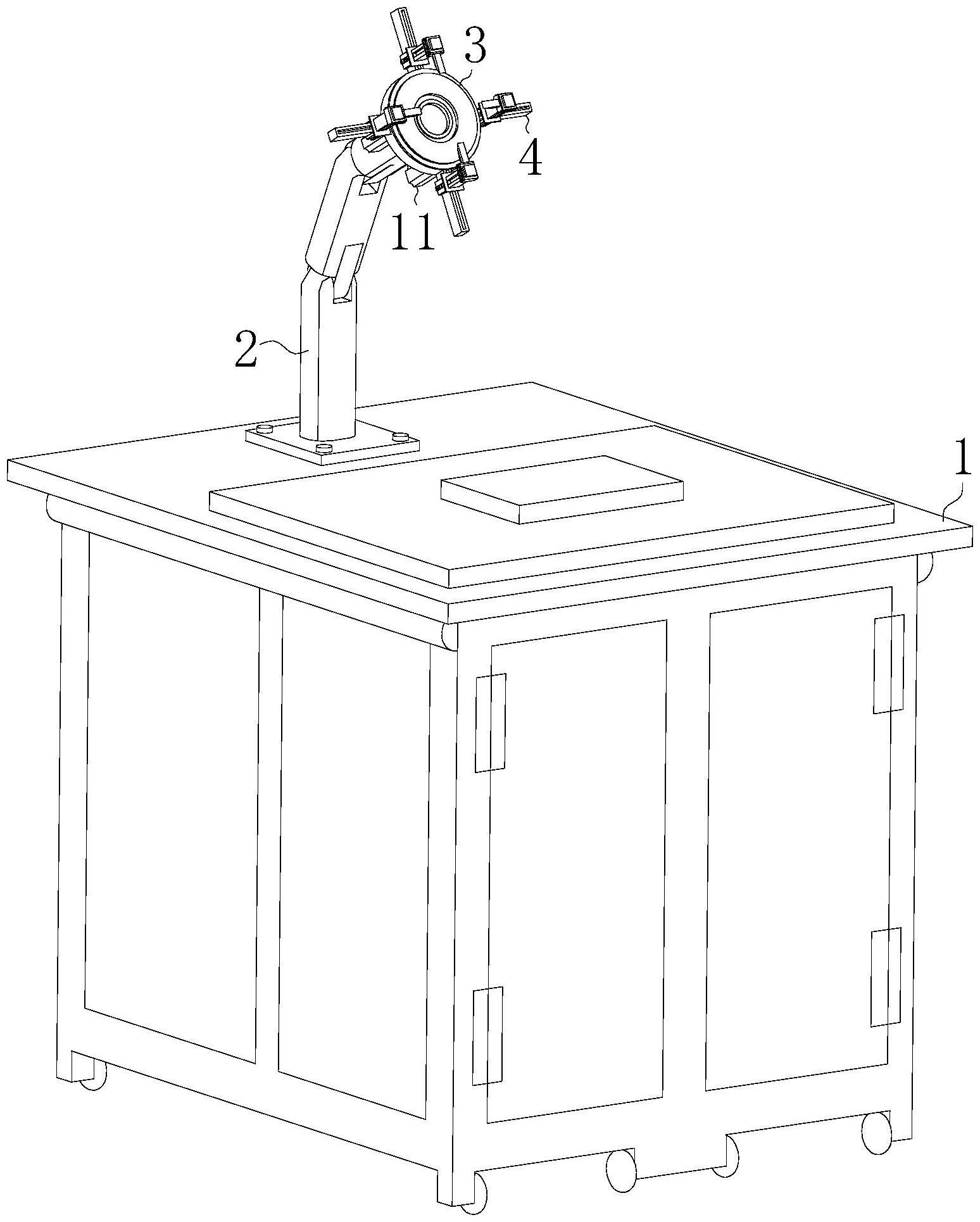
2、为实现上述目的,本实用新型提供如下技术方案:一种工业机器人末端执行器,包括工作台和设置在工作台表面的机器人控制系统,机器人控制系统包括工业机器人,所述工业机器人固定连接在工作台表面,所述工业机器人顶端设置有抓取机构;
3、所述抓取机构包括吸盘,所述吸盘固定连接在工业机器人顶端,所述吸盘表面阵列固定连接有横向导轨,所述横向导轨表面均滑动连接有横向紧锁滑块,所述横向紧锁滑块顶端均固定连接有纵向导轨,所述纵向导轨表面均滑动连接有纵向紧锁滑块,所述纵向紧锁滑动表面均固定连接有和吸盘表面平行的抓板。
4、优选的,所述抓板表面均固定连接有弹性压板,所述抓板端部设有弧面。
5、优选的,所述吸盘表面固定连接有环状弹性板。
6、优选的,所述吸盘端部阵列固定连接有用于提供吸盘吸力的气泵。
7、与现有技术相比,本实用新型的有益效果是:
8、1.本实用新型通过设置吸盘、横向导轨、纵向导轨和抓板,通过先吸后抓的方式,将物件先向上运动远离水平台面,使物件底端留有抓取空间,便于抓板送物件底端插入,保证抓板不会和物件本身发生挤压作用,从而减少抓板在抓取物件时对物件本身产生损害,随后控制横向紧锁滑块和纵向紧锁滑块分别沿着横向导轨和纵向导轨滑动,将物件继续向上运输,与吸盘表面进行夹持,提高运输物件的稳定性,随后取消吸盘吸力,节省动力。
9、2.本实用新型通过设置弹性压板和环状弹性板,提高夹持压力的同时降低抓板和吸盘表面对物件表面的应力作用,避免物件表面发生应力变形产生损害。
技术特征:
1.一种工业机器人末端执行器,包括工作台(1)和设置在工作台(1)表面的机器人控制系统,其特征在于:机器人控制系统包括工业机器人(2),所述工业机器人(2)固定连接在工作台(1)表面,所述工业机器人(2)顶端设置有抓取机构;
2.根据权利要求1所述的一种工业机器人末端执行器,其特征在于:所述抓板(8)表面均固定连接有弹性压板(9),所述抓板(8)端部设有弧面。
3.根据权利要求2所述的一种工业机器人末端执行器,其特征在于:所述吸盘(3)表面固定连接有环状弹性板(10)。
4.根据权利要求1所述的一种工业机器人末端执行器,其特征在于:所述吸盘(3)端部阵列固定连接有用于提供吸盘(3)吸力的气泵(11)。
技术总结
本技术工业机器人领域,具体为一种工业机器人末端执行器,包括工作台和设置在工作台表面的机器人控制系统,机器人控制系统包括工业机器人,所述工业机器人固定连接在工作台表面,所述工业机器人顶端设置有抓取机构。本技术通过设置吸盘、横向导轨、纵向导轨和抓板,通过先吸后抓的方式,将物件先向上运动远离水平台面,使物件底端留有抓取空间,便于抓板送物件底端插入,保证抓板不会和物件本身发生挤压作用,从而减少抓板在抓取物件时对物件本身产生损害,随后控制横向紧锁滑块和纵向紧锁滑块分别沿着横向导轨和纵向导轨滑动,将物件继续向上运输,与吸盘表面进行夹持,提高运输物件的稳定性,随后取消吸盘吸力,节省动力。
技术研发人员:吴乐平,朱红娟,顾晟吉,尹立明,丁艳萍
受保护的技术使用者:南京旭上数控技术有限公司
技术研发日:20221122
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!