一种智能轮式巡检机器人的制作方法
本申请涉及智能机器人的领域,尤其是涉及一种智能轮式巡检机器人。
背景技术:
1、目前针对机房内的巡检主要是依靠人工,为了节省人工成本,同时为了提高工作效率,一些机房会采用巡检机器人来代替人工进行巡检。
2、巡检机器人主要分为挂轨式巡检机器人与轮式巡检机器人,而针对设备摆放不太规整,摆放较为杂乱机房,通常会采用轮式巡检机器人。相关文件中记载的轮式巡检机器人通常包括可自主行走的车体与搭载在车体上的摄像头,随着车体的行走,摄像头将设备的情况拍下,并传递至远程监控系统,工作人员通过远程监控系统即可得知设备的状况,但是在一些环境较为恶劣,设备情况较为复杂的机房内,车体在使用一段时间后,便会由于磕碰而出现损坏,无法再次使用,不仅影响了工作效率,且提高了成本。
技术实现思路
1、为了减少轮式巡检机器人在使用过程中出现磕碰,影响使用的情况的发生,本申请提供一种智能轮式巡检机器人。
2、本申请提供的一种智能轮式巡检机器人采用如下的技术方案:
3、一种智能轮式巡检机器人,包括车体,在所述车体的外周壁上,沿所述车体的周向间隔设置有多个防碰撞雷达。
4、通过采用上述技术方案,由于轮式巡检机器人的行走路径较为复杂,因此在行走过程中,需要避让四周的物体,而防碰撞雷达能够的监测巡检机器人四周的物体,防止巡检机器人与四周的物体发生碰撞,防碰撞雷达能够进一步有效降低巡检机器人与四周的物体发生碰撞的可能性,从而降低维护成本。
5、可选的,在所述车体的底部,沿所述车体的周向间隔设置有多个防跌落雷达。
6、通过采用上述技术方案,防跌落雷达能够对地面上障碍物与障碍坑进行检测与判断,经防跌落雷达判断后,若巡检机器人可以跨越该障碍物,巡检机器人就会继续行进,若巡检机器人不可以跨越该障碍物,巡检机器人便会停下或寻找其他路径。
7、可选的,在所述车体的顶部安装有3d激光雷达。
8、通过采用上述技术方案,3d激光雷达作用范围广泛,能够有效降低巡检机器人发生磕碰的可能性。
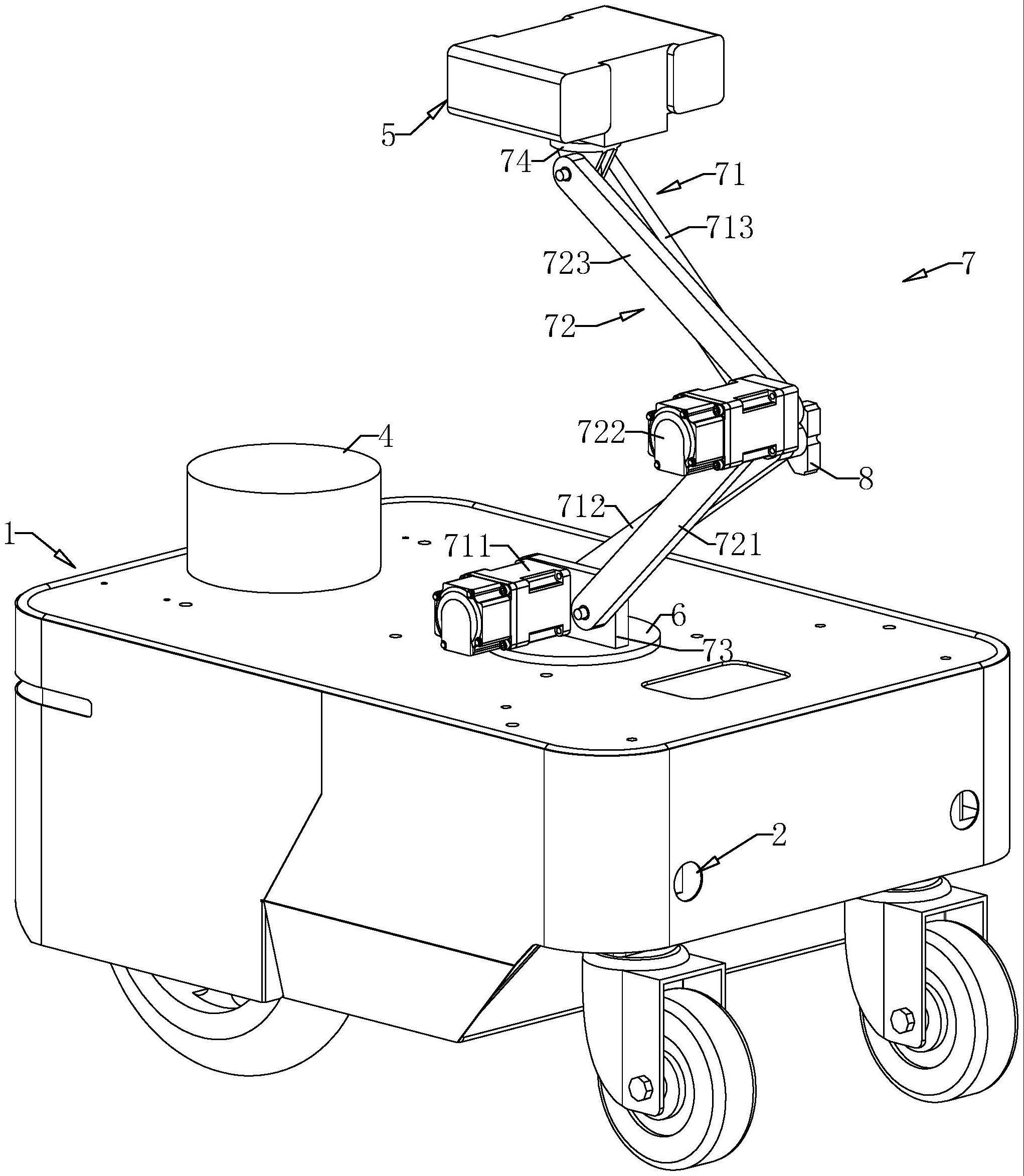
9、可选的,在所述车体的顶部还安装有升降臂,所述升降臂的一端安装在所述车体上,在所述升降臂的升降端安装有的的云台,所述云台用于监测所述设备的情况。
10、通过采用上述技术方案,云台除了监测设备的情况外,还能够辅助监测巡检机器人周围的情况,升降臂能够扩大云台的监测范围,提高监测效果。
11、可选的,在所述车体上还安装有旋转工作台,所述升降臂安装在所述旋转工作台上,所述旋转工作台可带动所述升降臂与安装在所述升降臂上的云台进行转动。
12、通过采用上述技术方案,进一步有效扩大云台的监测范围,提高监测效果。
13、可选的,所述升降臂包括固定安装在所述旋转工作台上的底座、第一升降组件、第二升降组件,以及固定座;
14、所述第一升降组件包括固定在所述底座上第一伺服电机、一端与所述第一伺服电机电机轴固定的第一升降杆,以及一端与所述第一升降杆另一端固定的第一摆动杆;
15、所述第二升降组件包括一端铰接在所述底座上的第一升降杆、固定在所述第一升降杆另一端的第二伺服电机,以及一端与所述第二伺服电机电机轴固定的第二摆动杆;
16、所述第一摆动杆远离所述第一升降杆的一端与所述固定座铰接,所述第二摆动杆远离所述的第二升降杆的一端与所述固定座铰接。
17、通过采用上述技术方案,当需要升降云台时,启动第一伺服电机与第二伺服电机,在第一伺服电机与第二伺服电机的驱动下,第一升降组件与第二升降组件相互限制,使得云台能够进行正常的升降。
18、可选的,所述云台包括的红外热成像仪与摄像头,所述红外热成像仪的监测端与所述摄像头的摄像端位于同一侧。
19、通过采用上述技术方案,红外热成像仪能够以“面”的形式对目标整体实时成像,使操作者通过屏幕显示的图像色彩和热点追踪显示功能就能初步判断发热情况和故障部位,红外热成像仪能够辅助摄像头,增强巡检机器人的巡视效果,能够更加快速的发现问题。
20、可选的,在所述第一升降杆与所述第一摆动杆的铰接处设置有气体传感器。
21、通过采用上述技术方案,气体传感器能够将气体的成分、浓度等信息传递至远端的监控系统,当设备出现损坏,产生异味,而摄像头无法感知时,气体传感器能够有效地传递信息,提醒工作人员及时地进行检修。
22、综上所述,本申请包括以下至少一种有益技术效果:
23、1.通过在所述车体的外周壁上,沿所述车体的周向间隔设置有多个防碰撞雷达,由于轮式巡检机器人的行走路径较为复杂,因此在行走过程中,需要避让四周的物体,而防碰撞雷达能够的监测巡检机器人四周的物体,防止巡检机器人与四周的物体发生碰撞,防碰撞雷达能够进一步有效降低巡检机器人人与障碍物发生碰撞的可能性,从而降低维护成本;
24、2.通过在所述车体的底部,沿所述车体的周向间隔设置有多个防跌落雷达,防跌落雷达能够对地面上障碍物与障碍坑进行检测与判断,经防跌落雷达判断后,若巡检机器人可以跨越该障碍物,巡检机器人就会继续行进,若巡检机器人不可以跨越该障碍物,巡检机器人便会停下或寻找其他路径;
25、3.通过在所述车体的顶部安装有3d激光雷达,3d激光雷达作用范围广泛,能够有效降低巡检机器人发生磕碰的可能性。
技术特征:
1.一种智能轮式巡检机器人,其特征在于:包括车体(1),在所述车体(1)的外周壁上,沿所述车体(1)的周向间隔设置有多个防碰撞雷达(2)。
2.根据权利要求1所述的一种智能轮式巡检机器人,其特征在于:在所述车体(1)的底部,沿所述车体(1)的周向间隔设置有多个防跌落雷达(3)。
3.根据权利要求2所述的一种智能轮式巡检机器人,其特征在于:在所述车体(1)的顶部安装有3d激光雷达(4)。
4.根据权利要求1所述的一种智能轮式巡检机器人,其特征在于:在所述车体(1)的顶部还安装有升降臂(7),所述升降臂(7)的一端安装在所述车体(1)上,在所述升降臂(7)的升降端安装有的云台(5),所述云台(5)用于监测设备的情况。
5.根据权利要求4所述的一种智能轮式巡检机器人,其特征在于:在所述车体(1)上还安装有旋转工作台(6),所述升降臂(7)安装在所述旋转工作台(6)上,所述旋转工作台(6)可带动所述升降臂(7)与安装在所述升降臂(7)上的云台(5)进行转动。
6.根据权利要求5所述的一种智能轮式巡检机器人,其特征在于:所述升降臂(7)包括固定安装在所述旋转工作台(6)上的底座(73)、第一升降组件(71)、第二升降组件(72),以及固定座(74);
7.根据权利要求6所述的一种智能轮式巡检机器人,其特征在于:所述云台(5)包括的红外热成像仪(51)与的摄像头(52),所述红外热成像仪(51)的监测端与所述摄像头(52)的摄像端位于同一侧。
8.根据权利要求6所述的一种智能轮式巡检机器人,其特征在于:在所述第一升降杆(712)与所述第一摆动杆(713)的铰接处设置有气体传感器(8)。
技术总结
本申请涉及智能机器人的领域,公开了一种智能轮式巡检机器人,其包括车体,在所述车体的外周壁上,沿所述车体的周向间隔设置有多个防碰撞雷达。本申请具有减少轮式巡检机器人在使用过程中出现磕碰,影响使用的情况的发生的效果。
技术研发人员:张晓勇,杜岩平,孙建,王兴越,马振华,苗学勇,周建,王凯,张瀚之,荆立伟,张宏志,张宏炯,王志勇,马光耀,张林,马文营,辛锋
受保护的技术使用者:北京潞电电气设备有限公司
技术研发日:20221125
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!