工业机械手底座的制作方法
本技术涉及机械手,具体为工业机械手底座。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取,搬运物件或操作工具的自动操作装置,特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
2、根据专利号为cn213332216u的一种机械手用减震底座,该方案中解决了机械手在工作的同时也会产生震动,从而导致机械手夹取工件掉落的问题,具有减少注塑机以及机械手带来的震动,保护工件的优点。
3、然而在实际操作过程中,由于底座的高度是固定不变的,在抓取物体过程中需要工作人员将机械手放置在与物体高度持平的位置,也就使得机械手对抓取不同高度处的物体时具有局限性,同时,机械手的长期使用,使得其中的组件会出现老化或损坏的现象,进而使得机械手出现操作上的问题,也就降低了机械手的工作效率。
4、基于此,本实用新型设计了工业机械手底座,以解决上述问题。
技术实现思路
1、针对现有技术的不足,本实用新型提供了工业机械手底座,具备能够调节高度和可拆卸的优点,解决了背景技术中提出的问题。
2、本实用新型提供如下技术方案:工业机械手底座,包括:下底座和上底座,所述下底座的上表面固定安装有第一空心块,所述第一空心块的内部转动连接有转动杆,所述转动杆的表面固定安装有第二空心块,所述第二空心块的侧面固定连接有第一固定柱,所述第一固定柱的表面转动连接有第一套环,所述第一套环的表面固定连接有连接杆,所述连接杆的侧面固定连接有第二套环,所述第二套环的内部转动连接有第二固定柱,所述第二固定柱的侧面固定连接有第一固定板。
3、优选的,所述上底座的上表面固定连接有第一固定块,所述第一固定块的表面开设有凹槽,所述凹槽的内部转动连接有转动柱,所述转动柱的表面固定连接有圆柱,所述圆柱的顶部固定安装有螺纹杆,所述螺纹杆的表面螺纹连接有螺帽,所述第一固定块的上表面活动连接有第二固定块,所述第二固定块的表面开设有块槽。
4、优选的,所述第一固定板的上表面固定安装有上底座,所述上底座的表面开设有槽,且槽的内部滑动连接有限位杆。
5、优选的,所述转动杆的侧面固定安装有电机,所述下底座的上表面固定连接有限位杆,所述限位杆的表面固定安装有空心板。
6、优选的,所述上底座的下表面固定连接有圆环,所述圆环的内部滑动连接有限位杆,所述限位杆的顶部固定安装有第二固定板。
7、优选的,所述第二固定块的上表面固定安装有本体,所述螺帽的下表面贴合有第二固定块。
8、与现有技术对比,本实用新型具备以下有益效果:
9、1、该种工业机械手底座,通过启动电机,使得转动杆在第一空心块的内部转动,由于第一空心块的表面固定安装有第二空心块,使得第二空心块伴随转动杆的转动而转动,第二空心块由原本的竖直状态变为水平状态,带动第二空心块侧面固定连接的第一固定柱向下摆动,由于第一固定柱的表面转动连接有第一套环,使得第一套环在第一固定柱向下摆动的情况下,可以小幅度调整角度,带动连接杆侧面固定连接的第二套环调整角度,使得第二固定柱慢慢向下运动,由于第二固定柱的侧面固定连接有第一固定板,第一固定板的上表面固定连接有上底座,也就使得上底座在限位杆的表面向下滑动,圆环的设置,使得上底座在限位杆的表面在向下滑动时不会左右晃动,达到限位的作用,同时第二固定板和空心板的设置,限制了上底座上下滑动的高度,整个操作过程中有效的解决了由于底座的高度是固定不变的,也就使得机械手对抓取不同高度处的物体时具有局限性的问题,该种结构的设计,使得机械手对于抓取不同高度的物体时,可以通过调节底座高度来达到抓取目的,工作人员也不需要再去寻找与物体高度持平的位置,便于人们使用,也就提高了机械手的工作效率。
10、2、该种工业机械手底座,通过转动转动柱,带动圆柱转动,将圆柱转动到第二固定块表面开设的块槽内部,由于圆柱的顶部固定连接有螺纹杆,通过转动螺帽,使得螺帽向下运动,当螺帽由原本的松弛状态变成牢牢压紧在第二固定块上表面的状态时停止转动螺帽,也就使得螺帽与第二固定块形成一种夹持状态,保证了本体被固定在第一固定块上不晃动,若想将本体拆卸下来,只需反向转动螺帽,接着转动转动柱即可,整个操作过程中有效的解决了机械手的长期使用,使得其中的组件会出现老化或损坏的现象,该种结构的设计,使得机械手与底座卡接在一起,对于老化或损坏的问题,可以通过转动转动柱和螺帽进而将机械手拆卸下来进行更换或维修,也就延长了机械手的使用寿命。
技术特征:
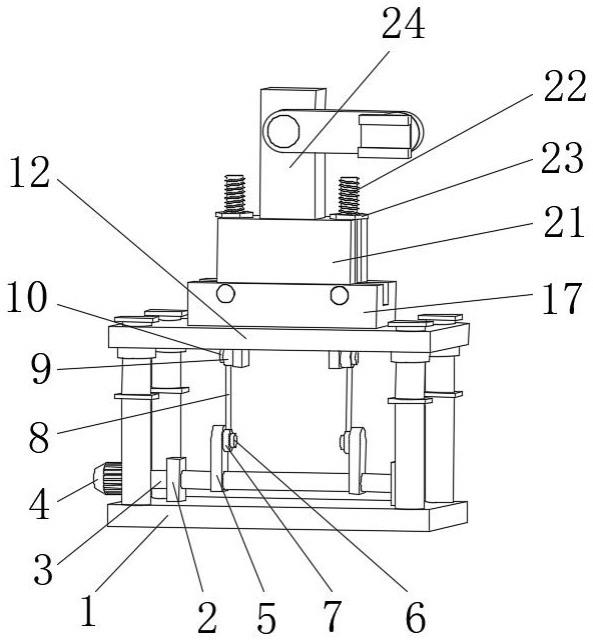
1.工业机械手底座,其特征在于,包括:下底座(1)和上底座(12),所述下底座(1)的上表面固定安装有第一空心块(2),所述第一空心块(2)的内部转动连接有转动杆(3),所述转动杆(3)的表面固定安装有第二空心块(5),所述第二空心块(5)的侧面固定连接有第一固定柱(6),所述第一固定柱(6)的表面转动连接有第一套环(7),所述第一套环(7)的表面固定连接有连接杆(8),所述连接杆(8)的侧面固定连接有第二套环(9),所述第二套环(9)的内部转动连接有第二固定柱(10),所述第二固定柱(10)的侧面固定连接有第一固定板(11)。
2.根据权利要求1所述的工业机械手底座,其特征在于:所述上底座(12)的上表面固定连接有第一固定块(17),所述第一固定块(17)的表面开设有凹槽(18),所述凹槽(18)的内部转动连接有转动柱(19),所述转动柱(19)的表面固定连接有圆柱(20),所述圆柱(20)的顶部固定安装有螺纹杆(22),所述螺纹杆(22)的表面螺纹连接有螺帽(23),所述第一固定块(17)的上表面活动连接有第二固定块(21),所述第二固定块(21)的表面开设有块槽(25)。
3.根据权利要求1所述的工业机械手底座,其特征在于:所述第一固定板(11)的上表面固定安装有上底座(12),所述上底座(12)的表面开设有槽,且槽的内部滑动连接有限位杆(13)。
4.根据权利要求1所述的工业机械手底座,其特征在于:所述(3)转动杆的侧面固定安装有电机(4),所述下底座(1)的上表面固定连接有限位杆(13),所述限位杆(13)的表面固定安装有空心板(14)。
5.根据权利要求1所述的工业机械手底座,其特征在于:所述上底座(12)的下表面固定连接有圆环(15),所述圆环(15)的内部滑动连接有限位杆(13),所述限位杆(13)的顶部固定安装有第二固定板(16)。
6.根据权利要求2所述的工业机械手底座,其特征在于:所述第二固定块(21)的上表面固定安装有本体(24),所述螺帽(23)的下表面贴合有第二固定块(21)。
技术总结
本技术涉及机械手技术领域,且公开了工业机械手底座,包括:下底座和上底座,所述下底座的上表面固定安装有第一空心块,所述第一空心块的内部转动连接有转动杆,所述转动杆的表面固定安装有第二空心块,所述第二空心块的侧面固定连接有第一固定柱,所述第一固定柱的表面转动连接有第一套环,所述第一套环的表面固定连接有连接杆,所述连接杆的侧面固定连接有第二套环,所述第二套环的内部转动连接有第二固定柱。该种工业机械手底座,使得机械手对于抓取不同高度的物体时,可以通过调节底座高度来达到抓取目的,工作人员也不需要再去寻找与物体高度持平的位置,便于人们使用,也就提高了机械手的工作效率。
技术研发人员:李其文,李其春
受保护的技术使用者:淮安市锦和耗材有限公司
技术研发日:20221129
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!