一种电动快换盘的制作方法
本发明涉及快换盘,具体为一种电动快换盘。
背景技术:
1、随着工业自动化的快速发展,工业机器人在生产制造中得到广泛应用。快换装置可以实现快速更换末端工具,使机器人的利用效率大大提高,实现“一机多用”,使机器人的应用更具柔性,目前市面上的大部分快换盘为气动锁定和解锁,必须提供压缩气体方可使用,在一些无气源的场合,例如服务业、教育、洁净车间等无法提供压缩空气,导致气动快换使用受到限制。
2、现有的电动快换盘存在的缺陷是:
3、1、现有的一般的快换盘产品使用压缩空气作为动力源,但是在实验室、商场、写字楼、学校等无气源场合无法使用。
技术实现思路
1、本发明的目的在于提供一种电动快换盘,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种电动快换盘,包括机器人侧盘、工具侧盘、机器人侧电模块和工具侧电模块,所述机器人侧盘的底部安装有底板,底板的顶部安装有直流电机,直流电机的输出端活动连接有锥齿轮一,底板的顶部安装有安装板,安装板的一侧安装有轴承支座一,安装板的另一侧安装有轴承支座二,轴承支座一和轴承支座二的内侧活动贯穿安装有蜗杆,蜗杆的一端安装有锥齿轮二,锥齿轮二与锥齿轮一相互啮合。
3、优选的,所述底板的底部通过螺栓安装有内锥孔盘,内锥孔盘顶壁的内侧活动贯穿安装有丝杆,丝杆贯穿机器人侧盘的内侧,丝杆的底端通过螺纹安装有螺钉,丝杆的底端通过螺钉安装有凸轮轴,内锥孔盘的内侧活动安装有若干组钢珠,钢珠紧贴在凸轮轴的外壁。
4、优选的,所述丝杆的外侧通过螺纹活动安装有蜗轮,蜗轮的底端安装活动有安装座,安装座固定在底板的顶部,蜗轮的卡齿与蜗杆上的卡齿相互啮合,蜗轮的顶部通过螺栓安装有防转限位环,防转限位环呈c字形。
5、优选的,所述丝杆的顶端外侧安装有移动块,移动块位于防转限位环的内侧。
6、优选的,所述底板的顶部安装有限位开关支架。
7、优选的,所述限位开关支架的正面活动安装有下限位开关,限位开关支架的正面活动安装有上限位开关,上限位开关位于下限位开关的上方,移动块位于上限位开关和下限位开关之间。
8、优选的,所述机器人侧盘的内侧贯穿安装有定位销,定位销的底端延伸出底板的底部。
9、优选的,所述机器人侧盘的后壁安装有机器人侧电模块,机器人侧盘的底部活动安装有工具侧盘,工具侧盘的后壁安装有工具侧电模块,工具侧盘的内侧通过螺栓安装有卡盘,机器人侧盘的后壁贯穿安装有接口。
10、优选的,该影像分析设备的使用方法如下:
11、s1、机器人侧盘通过螺栓与机器人法兰相连接,通过机器人控制机器人侧盘的移动,在工作前,将接口与传输线连接为机器人侧盘的运行提供电能;
12、s2、直流电机运行带动输出端的锥齿轮一旋转,锥齿轮一旋转带动锥齿轮二跟着旋转,锥齿轮二旋转带动蜗杆转动,蜗杆转动带动蜗轮转动,蜗轮内部为螺纹螺母,丝杆螺母带动丝杆转动,由于蜗轮被防转限位环上下限位杆螺母转动会带动丝杆上下移动;
13、s3、当丝杆上移,会带动凸轮轴上移,钢珠随之回缩,快换盘工具侧盘和快换盘机器人侧盘实现解锁;当丝杆下移,凸轮轴随之下移,钢珠被推出,钢珠与快换盘工具侧卡盘受力接触,快换盘工具侧盘和快换盘机器人侧盘实现锁紧;
14、s4、移动块与丝杆为固连,丝杆上下移动,带动移动块上下移动,当移动块移动至上方,接触到上限位开关,直流电机停止转动,控制系统发出解锁成功指令;当移动块移动至下方,接触到下限位开关,直流电机停止转动,控制系统发出锁定成功指令。
15、与现有技术相比,本发明的有益效果是:
16、1、本发明通过安装有直流电机,直流电机作为动力源实现了快换盘的快速锁紧和解锁,可以实现无气源环境下工业机器人末端工具快速更换功能,使用普通直流电机作为动力源,可有效节省成本,扩大产品适用范围。
17、2.本发明通过安装有直流电机运行带动输出端的锥齿轮一旋转,锥齿轮一旋转带动锥齿轮二跟着旋转,锥齿轮二旋转带动蜗杆转动,蜗杆转动带动蜗轮转动,蜗轮内部为螺纹螺母,丝杆螺母带动丝杆转动,由于蜗轮被防转限位环上下限位杆螺母转动会带动丝杆上下移动,锁紧力可调,可以实现不负载的工具快换,当丝杆上移,会带动凸轮轴上移,钢珠随之回缩,快换盘工具侧盘和快换盘机器人侧盘实现解锁,当丝杆下移,凸轮轴随之下移,钢珠被推出,钢珠与快换盘工具侧卡盘受力接触,快换盘工具侧盘和快换盘机器人侧盘实现锁紧。
18、3.本发明的结构紧凑,与同负载普通气动快换盘尺寸相当。
技术特征:
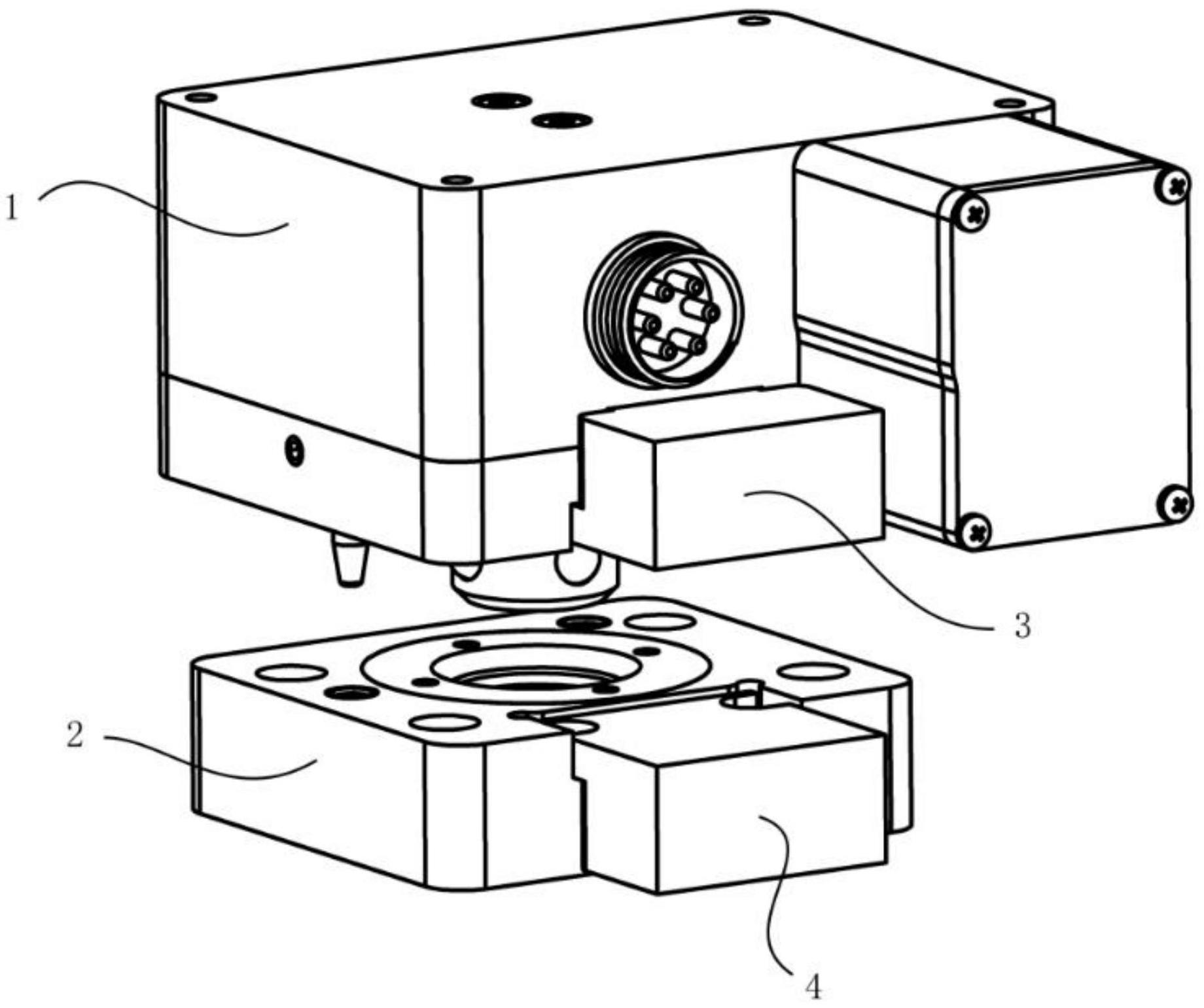
1.一种电动快换盘,包括机器人侧盘(1)、工具侧盘(2)、机器人侧电模块(3)和工具侧电模块(4),其特征在于:所述机器人侧盘(1)的底部安装有底板(100),所述底板(100)的顶部安装有直流电机(101),所述直流电机(101)的输出端活动连接有锥齿轮一(102),所述底板(100)的顶部安装有安装板,所述安装板的一侧安装有轴承支座一(104),所述安装板的另一侧安装有轴承支座二(107),所述轴承支座一(104)和轴承支座二(107)的内侧活动贯穿安装有蜗杆(106),所述蜗杆(106)的一端安装有锥齿轮二(103),锥齿轮二(103)与锥齿轮一(102)相互啮合。
2.根据权利要求1所述的一种电动快换盘,其特征在于:所述底板(100)的底部通过螺栓安装有内锥孔盘(116),所述内锥孔盘(116)顶壁的内侧活动贯穿安装有丝杆(113),丝杆(113)贯穿机器人侧盘(1)的内侧,所述丝杆(113)的底端通过螺纹安装有螺钉,所述丝杆(113)的底端通过螺钉安装有凸轮轴(114),所述内锥孔盘(116)的内侧活动安装有若干组钢珠(115),钢珠(115)紧贴在凸轮轴(114)的外壁。
3.根据权利要求2所述的一种电动快换盘,其特征在于:所述丝杆(113)的外侧通过螺纹活动安装有蜗轮(105),所述蜗轮(105)的底端安装活动有安装座,安装座固定在底板(100)的顶部,蜗轮(105)的卡齿与蜗杆(106)上的卡齿相互啮合,所述蜗轮(105)的顶部通过螺栓安装有防转限位环(112),防转限位环(112)呈c字形。
4.根据权利要求2所述的一种电动快换盘,其特征在于:所述丝杆(113)的顶端外侧安装有移动块(109),移动块(109)位于防转限位环(112)的内侧。
5.根据权利要求1所述的一种电动快换盘,其特征在于:所述底板(100)的顶部安装有限位开关支架(111)。
6.根据权利要求5所述的一种电动快换盘,其特征在于:所述限位开关支架(111)的正面活动安装有下限位开关(108),所述限位开关支架(111)的正面活动安装有上限位开关(110),上限位开关(110)位于下限位开关(108)的上方,移动块(109)位于上限位开关(110)和下限位开关(108)之间。
7.根据权利要求1所述的一种电动快换盘,其特征在于:所述机器人侧盘(1)的内侧贯穿安装有定位销(117),定位销(117)的底端延伸出底板(100)的底部。
8.根据权利要求1所述的一种电动快换盘,其特征在于:所述机器人侧盘(1)的后壁安装有机器人侧电模块(3),所述机器人侧盘(1)的底部活动安装有工具侧盘(2),所述工具侧盘(2)的后壁安装有工具侧电模块(4),所述工具侧盘(2)的内侧通过螺栓安装有卡盘(201),所述机器人侧盘(1)的后壁贯穿安装有接口(120)。
9.根据权利要求1-8任意一项所述的一种电动快换盘的使用方法,其特征在于,该电动快换盘的使用方法如下:
技术总结
本发明公开了一种电动快换盘,包括机器人侧盘、工具侧盘、机器人侧电模块和工具侧电模块,所述机器人侧盘的底部安装有底板,底板的顶部安装有直流电机,直流电机的输出端活动连接有锥齿轮一,底板的顶部安装有安装板,安装板的一侧安装有轴承支座一,安装板的另一侧安装有轴承支座二,轴承支座一和轴承支座二的内侧活动贯穿安装有蜗杆,蜗杆的一端安装有锥齿轮二,锥齿轮二与锥齿轮一相互啮合。本发明通过安装有直流电机,直流电机作为动力源实现了快换盘的快速锁紧和解锁,可以实现无气源环境下工业机器人末端工具快速更换功能,使用普通直流电机作为动力源,可有效节省成本,扩大产品适用范围。
技术研发人员:任君坪,吕春年,尹洪靖,庹奎,郭金霖
受保护的技术使用者:重庆智能机器人研究院
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!