一种机器人动力系统测试工作台的制作方法
本技术涉及机械领域,尤其涉及到机械部件,具体是指一种机器人动力系统测试工作台。
背景技术:
1、机器人也成为机械手臂,是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维或二维空间上的某一点进行作业。
2、机械手臂根据结构形式的不同分为多关节机械手臂,目前根据客户需求生产的机械手臂需要满足在水平面上搬运货物,同时也需要在竖向平面内提升货物,在机械手臂生产出样机后,需要对机械手臂的动力系统进行测试,从而能够测试机械手臂在水平面和竖向平面内的正常运行。
技术实现思路
1、本实用新型针对现有技术的不足,提供一种机器人动力系统测试工作台,能够对机械手臂在水平面和竖向平面内的正常运行进行测试,满足测试需求。
2、本实用新型是通过如下技术方案实现的,一种机器人动力系统测试工作台,包括与机器人可拆卸固定连接的底盘,底盘上固接有位于机器人一侧的立板,立板上设有水平延伸的测试框,测试框设有沿竖向排布的两个测试板,测试板上开设有贯穿测试板的长孔,两个长孔交错设置,机器人的输出端上可拆卸连接有依次贯穿两个长孔且与长孔宽度适配的竖向延伸第一测试杆,所述测试框内还设有监测两个测试板移动速度的感应器。
3、本实用新型在使用时,通过底盘将机器人的底座固定,从而保证及机器人在动作时的稳定性,然后在机器人的输出端安装上第一测试杆,并使第一测试杆依次穿过两个长孔,然后驱动机器人动作,机器人通过第一测试杆带动两个测试板在测试框内移动,同时速度感应器记录测试板的移动速度数据,从而完成在水平方向上的测试。
4、作为优选,立板的顶面上轴接有纵向延伸的转轴,所述测试框的一侧固接在转轴上,所述立板上还设有推动测试框转动的第一驱动装置,所述机器人的输出端上可拆卸连接有沿横向延伸的第二测试杆。
5、本优选方案通过第一驱动装置的设置,当第一驱动装置伸出时,带动测试框绕转轴轴线转动,从而使测试框转动90°,从而使转动框沿竖直方向延伸,此时一个测试板沿竖向延伸,另一个测试板沿竖向滑动,然后将调节机器人的位置,并使底盘将机器人固定。然后在将机器人的输出端安装上第二测试杆,并使第二测试杆依次穿过两个长孔,然后驱动机器人动作,机器人通过第二测试杆带动两个测试板在测试框内移动,同时速度感应器记录测试板的移动速度数据,从而完成在竖直方向上的测试,从而实现机器人在本方案中两个方向上的测试,特别的测试板自身的重量小,机器人提供的动力较大,所以对测试板自身的重量可以忽略不计。
6、作为优选,所述第一驱动装置包括位于测试板下方且沿纵向排布的两个气缸,立板位于气缸和机器人之间,气缸的底座铰接在立板上,气缸的伸出端铰接在测试框的侧壁上。
7、本优选方案通过气缸的设置,便于对测试框的支撑,以及驱动测试框转动。
8、作为优选,所述测试框内的穿孔为方形。本优选方案通过方形的设置,便于制造安装。
9、作为优选,所述长孔的长度为测试框方形长孔的0.9-1倍。
10、本优选方案通过长孔长度的设置,便于增大机械手臂的运动范围,避免因长孔长度太小,影响机械手臂的动作。
11、作为优选,所述底盘包括两个横向延伸纵向排布的横梁,以及连接两个纵梁且纵向延伸的纵梁,所述立板固接在纵梁上,两个横梁上设有沿横向排布的两个固定结构,所述固定结构包括穿设在两个纵梁上且位于机器人底座两侧的限位杆,两个限位杆沿横向排布纵向延伸,限位杆和底座之间填充有缓冲橡胶,纵梁上还螺纹连接有位于两个限位杆之间顶丝,顶丝的一端顶至所述底座上。
12、本优选方案通过两个固定结构的设置,便于机器手臂在水平方向和竖直方向时的固定,通过限位杆和缓冲橡胶的设置,限制机器人底座在横向上的移动,通过顶丝的设置,便于限制底座在纵向上的移动,从而起到保证机器人的稳定。
13、作为优选,所述纵梁和横梁的底面上还设有行走轮。 本优选方案通过行走轮的设置,便于本方案测试工作台的移动。
14、本实用新型的有益效果为:通过底盘将机器人的底座固定,从而保证及机器人在动作时的稳定性,然后在机器人的输出端安装上第一测试杆,并使第一测试杆依次穿过两个长孔,然后驱动机器人动作,机器人通过第一测试杆带动两个测试板在测试框内移动,同时速度感应器记录测试板的移动速度数据,从而完成在水平方向上的测试;通过第一驱动装置的设置,当第一驱动装置伸出时,带动测试框绕转轴轴线转动,从而使测试框转动90°,从而使转动框沿竖直方向延伸,此时一个测试板沿竖向延伸,另一个测试板沿竖向滑动,然后将调节机器人的位置,并使底盘将机器人固定。然后在将机器人的输出端安装上第二测试杆,并使第二测试杆依次穿过两个长孔,然后驱动机器人动作,机器人通过第二测试杆带动两个测试板在测试框内移动,同时速度感应器记录测试板的移动速度数据,从而完成在竖直方向上的测试,从而实现机器人在本方案中两个方向上的测试。
技术特征:
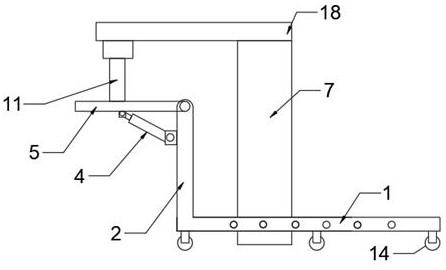
1.一种机器人动力系统测试工作台,其特征在于:包括与机器人(7)可拆卸固定连接的底盘,底盘上固接有位于机器人(7)一侧的立板(2),立板(2)上设有水平延伸的测试框(5),测试框(5)设有沿竖向排布的两个测试板(15),测试板(15)上开设有贯穿测试板(15)的长孔(16),两个长孔(16)交错设置,机器人(7)的输出端上可拆卸连接有依次贯穿两个长孔(16)且与长孔(16)宽度适配的竖向延伸第一测试杆(11),所述测试框(5)内还设有监测两个测试板(15)移动速度的感应器(17)。
2.根据权利要求1所述的机器人动力系统测试工作台,其特征在于:立板(2)的顶面上轴接有纵向延伸的转轴(13),所述测试框(5)的一侧固接在转轴(13)上,所述立板(2)上还设有推动测试框(5)转动的第一驱动装置(4),所述机器人(7)的输出端上可拆卸连接有沿横向延伸的第二测试杆(12)。
3.根据权利要求2所述的机器人动力系统测试工作台,其特征在于可:所述第一驱动装置(4)包括位于测试板(15)下方且沿纵向排布的两个气缸,立板(2)位于气缸和机器人(7)之间,气缸的底座(6)铰接在立板(2)上,气缸的伸出端铰接在测试框(5)的侧壁上。
4.根据权利要求1 所述的机器人动力系统测试工作台,其特征在于:所述测试框(5)内的穿孔为方形。
5.根据权利要求4 所述的机器人动力系统测试工作台,其特征在于:所述长孔(16)的长度为测试框(5)方形长孔(16)的0.9-1倍。
6.根据权利要求2 所述的机器人动力系统测试工作台,其特征在于:所述底盘包括两个横向延伸纵向排布的横梁(1),以及连接两个横梁且纵向延伸的纵梁(3),所述立板(2)固接在纵梁(3)上,两个横梁(1)上设有沿横向排布的两个固定结构,所述固定结构包括穿设在两个横梁上且位于机器人(7)底座(6)两侧的限位杆(9),两个限位杆(9)沿横向排布纵向延伸,限位杆(9)和底座(6)之间填充有缓冲橡胶(8),横梁上还螺纹连接有位于两个限位杆(9)之间顶丝(10),顶丝(10)的一端顶至所述底座(6)上。
7.根据权利要求6 所述的机器人动力系统测试工作台,其特征在于:所述纵梁(3)和横梁(1)的底面上还设有行走轮(14)。
技术总结
本技术涉及一种机器人动力系统测试工作台,包括与机器人可拆卸固定连接的底盘,底盘上固接有位于机器人一侧的立板,立板上设有水平延伸的测试框,测试框设有沿竖向排布的两个测试板,测试板上开设有贯穿测试板的长孔,两个长孔交错设置,机器人的输出端上可拆卸连接有依次贯穿两个长孔且与长孔宽度适配的竖向延伸第一测试杆,所述测试框内还设有监测两个测试板移动速度的感应器。本技术在机器人的输出端安装上第一测试杆,并使第一测试杆依次穿过两个长孔,然后驱动机器人动作,机器人通过第一测试杆带动两个测试板在测试框内移动,同时速度感应器记录测试板的移动速度数据,从而完成在水平方向上的测试。
技术研发人员:李洪芹,孟立锋,张超,单崇辉
受保护的技术使用者:山东科为机器人有限公司
技术研发日:20221130
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!