一种多功能作业平台的工作机械臂的制作方法
本技术属于机械臂,具体涉及一种多功能作业平台的工作机械臂。
背景技术:
1、针对大规模的高速铁路建设项目,为进一步降低施工人员的体力劳动强度,提高施工效率、施工质量,提升高速铁路接触网系统安全可靠性,研发接触网隧道多功能作业平台具有十分重要的现实意义。
2、我国是基础建设大国,桥梁、隧道、铁路、大型建筑和设备的建设或制造,都对机械臂具有迫切的需求,但是受技术条件限制,目前能投入工程特定环境使用的机械臂仍然相对较少,工程建设领域的机械臂较少的原因在于:一方面,国内外对工程施工机械臂技术的研究相对较少,技术还没有较大的突破性进展;另一方面则是,工程领域的机械臂使用环境复杂恶劣,对机械臂的载荷,精度,使用效率等性能都提出了很高的要求。
3、现有的高速铁路接触网隧道施工作业中存在以下问题:
4、缺少针对复杂恶劣的环境使用的机械臂,现有的铁路接触网隧道施工机械臂的载荷、精度、使用效率以及自动化程度不高。
技术实现思路
1、为解决上述技术问题,本实用新型提供一种多功能作业平台的工作机械臂,设计了一种全自动、智能化工作机械臂,相比于其他普通机械臂,提高了自动化程度、精度、灵敏度、使用效率以及安全可靠性,降低了施工人员的体力劳动强度,提高了施工质量。
2、本实用新型采用的技术方案如下:
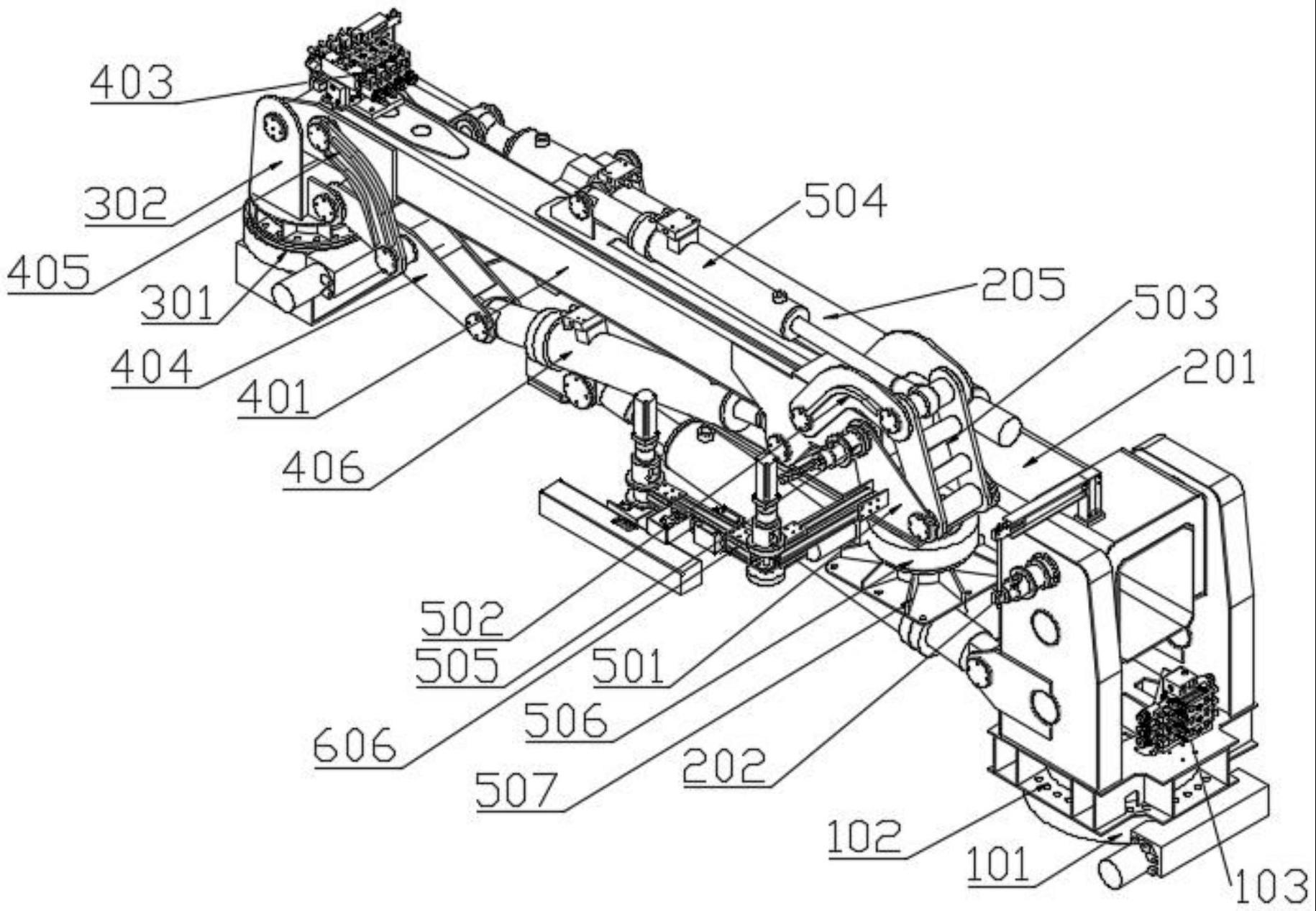
3、一种多功能作业平台的工作机械臂,包括转台模块、伸缩模块、折臂回转模块、折臂模块、飞臂模块和视觉模块;所述转台模块安装在多功能作业平台上,带动整个机械臂实现整体回转功能;所述伸缩模块与转台模块的上部铰接,用于对机械臂进行伸缩调节;所述折臂回转模块与伸缩模块的一端固定连接,用于带动折臂模块实现回转;所述折臂模块与折臂回转模块的一侧铰接,所述折臂模块可实现俯仰的动作;所述飞臂模块与折臂模块铰接,能实现大角度的俯仰动作;所述视觉模块与飞臂模块的一侧相固定,用于对部件进行视觉探测。
4、优选的,所述转台模块包括第一回转支承,所述第一回转支承的上部设置有第一转台,所述第一转台上设置有第一电磁阀安装座,所述第一电磁阀安装座上设置有第一电磁阀;所述第一转台与伸缩模块铰接。
5、采用上述技术方案:所述第一回转支承固定在作业平台的车架表面,第一回转支承上设置有液压马达,驱动第一回转支承转动,带动第一转台转动,从而带动机械臂整体实现回转,第一电磁阀。
6、优选的,所述伸缩模块包括一级伸缩臂,所述一级伸缩臂的一端与所述第一转台铰接,在一级伸缩臂与第一转台的铰接处安装有第一角度编码器;所述一级伸缩臂的两侧还对称设置有两根变幅液压缸,每根所述变幅液压缸的活塞端分别与所述一级伸缩臂的下部铰接,每根所述变幅液压缸的缸体分别与第一转台的两侧铰接。
7、采用上述技术方案:一级伸缩臂与转台相铰接,所述变幅液压缸的活塞伸缩时,带动一级伸缩臂做俯仰运动。
8、优选的,所述一级伸缩臂的内部套设有二级伸缩臂,所述二级伸缩臂与所述一级伸缩臂滑动连接;所述二级伸缩臂的上部铰接有伸缩液压缸的活塞,所述伸缩液压缸的缸体与所述一级伸缩臂的上端部铰接;所述二级伸缩臂的端部与所述折臂回转模块连接。
9、采用上述技术方案:伸缩液压缸的活塞伸缩时,带动二级伸缩臂在一级伸缩臂的内部进行滑动,从而实现二节臂之间的伸缩功能。
10、优选的,所述折臂回转模块包括第二回转支承,所述第二回转支承的外圈与二级伸缩臂远离一级伸缩臂的一端连接,所述第二回转支承的内圈连接有折臂回转转台的下部,所述折臂回转转台与折臂模块铰接。
11、采用上述技术方案:第二回转支承上设置有液压马达,驱动第二回转支承转动,带动折臂回转转台转动,从而带动折臂模块以及与折臂模块相连的部件进行回转。
12、优选的,所述折臂模块包括折臂主体,所述折臂主体的端部与所述折臂回转转台的上部铰接,所述折臂主体与折臂回转转台铰接的铰接轴处通过螺纹连接有第二角度编码器,用于测量关节角度,可远程接收编码器数据;所述折臂回转转台的一侧依次铰接有第一折臂连杆以及折臂液压缸,所述折臂液压缸的活塞端与所述折臂主体的下部铰接;所述折臂主体的两侧分别铰接有第二折臂连杆,两个所述第二折臂连杆另一端分别与第一折臂连杆的两侧铰接,所述第二折臂连杆远离折臂液压缸的活塞端;所述折臂主体的上部设置有第二电磁阀座,所述第二电磁阀座上设置有第二电磁阀;所述折臂主体的一侧与飞臂模块连接。
13、采用上述技术方案:折臂液压缸的活塞端伸缩,带动第一折臂连杆绕铰接轴做俯仰运动,所述第一折臂连杆做俯仰运动带动第二折臂连杆绕铰接轴转动,所述第二折臂连杆转动带动折臂主体做俯仰运动。
14、优选的,所述飞臂模块包括飞臂主体,所述飞臂主体的上端与折臂主体的端部铰接,所述飞臂主体与折臂主体铰接的一端远离第二电磁阀,所述飞臂主体与折臂主体铰接的铰接轴处通过螺纹连接有第三角度编码器;还包括两个第一飞臂连杆,两个所述第一飞臂连杆的端部分别与折臂主体的端部两侧铰接,两个所述第一飞臂连杆的另一端分别与第二飞臂连杆一端的两侧铰接,所述第二飞臂连杆的另一端与飞臂主体的下部铰接;两个所述第一飞臂连杆与第二飞臂连杆铰接的部位同轴铰接有飞臂液压缸的活塞端,所述飞臂液压缸的缸体与折臂主体的上部铰接;所述飞臂主体的下部与第三回转支承的内圈固定连接,所述第三回转支承的下部固定连接有机具连接座。
15、采用上述技术方案:飞臂液压缸的活塞端伸缩时,带动第一飞臂连杆绕其与折臂主体的铰接点做铰接运动,带动第二飞臂连杆绕其与飞臂主体的铰接点运动,从而带动飞臂主体完成大角度俯仰运动;第二回转支承上设置有液压马达,驱动第二回转支承转动,带动折臂回转转台转动,第三回转支承上设置有液压马达,驱动第三回转支承转动,带动机具连接座转动,从而实现相对于飞臂模块安装面内的回转运动。
16、优选的,所述视觉模块包括第一固定梁,所述第一固定梁的一端与飞臂主体的一侧固定连接,所述第一固定梁的另一端依次连接有第一电机组件、第二固定梁以及第二电机组件,所述第二固定梁与第一固定梁的安装方向相垂直;所述第二固定梁的两侧对称设置有测距传感器,每个所述测距传感器的外部均设置有测距传感器保护罩,每个所述测距传感器保护罩分别与第二固定梁的两侧相固定;所述第二固定梁的前侧设置有激光测距仪,所述激光测距仪的外部设置有激光测距仪保护罩;所述第二固定梁上设置有相机安装座,所述相机安装座上设置有2d相机,所述2d相机的外部设置有2d相机保护罩,所述2d相机保护罩与相机安装座固定连接,所述相机安装座上设置有3d相机,所述3d相机的外部设置有3d相机保护罩,所述3d相机保护罩与相机安装座固定连接。
17、采用上述技术方案:所述第一固定梁端部设置的伺服电机启动后,驱动第一固定梁收回至折臂模块的一侧或者展开,从而可在工作转态时,通过伺服电机的驱动将视觉模块外伸至所需的位置,实现对接触网部件的精确视觉探测;所述2d相机用于获取目标平面图像数据,采用远程控制,所述3d相机用于对目标进行扫描获取三维点云模型,采用远程控制,激光测距仪用于地形测量,测距传感器为激光位移传感器,用于获取距离信息。
18、优选的,所述变幅液压缸、伸缩液压缸、折臂液压缸以及飞臂液压缸的缸体上分别设置有平衡阀。
19、采用上述技术方案,平衡阀用于平衡液压油路两端压力。
20、综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
21、设计了一种全自动、智能化工作机械臂,相比于其他普通机械臂,提高了自动化程度、精度、灵敏度、使用效率以及安全可靠性,降低了施工人员的体力劳动强度,提高了施工质量。
- 还没有人留言评论。精彩留言会获得点赞!