一种具有视觉定位功能的水培蔬菜机器人采摘夹爪的制作方法
本申请涉及水培蔬菜,尤其是涉及一种具有视觉定位功能的水培蔬菜机器人采摘夹爪。
背景技术:
1、目前,视觉检测就是用机器代替人眼来做测量和判断。视觉检测是指通过机器视觉产品将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号,图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
2、现有公开号为cn208468379u的中国专利,其公开了一种具有视觉定位功能的机械手,该技术方案以基台承载上方的运动机构,并利用基台外侧的肋板保持稳定,在此基础上,以连接在基台上的转盘为机械手实现水平面内的转动,并以四段机械臂构成机械手的复合式运动机构,同时在第四机械臂末端配置吸盘用于对平板状物料执行吸附式抓取动作。此外,在基台上刻画了指示角度的坐标轴或刻度线,由于摄像头通过下探杆直接面对基台获取图像,因此可依据图像中坐标轴或刻度线的读数来确定当前转盘所转动到的位置,基于这种模式,通过人工观察或图像识别手段即可实时掌握转盘的转动方位,进而判断其在重复性操作中转盘的转动偏差。
3、将上述设备运用至水培蔬菜的采摘时,通过摄像头对蔬菜进行定位,然后通过机械手对蔬菜进行采摘。
4、针对上述中的相关技术,发明人认为使用上述设备虽然能够对蔬菜进行定位,但是机械手的夹持效率较低,且在夹持蔬菜的过程中,蔬菜容易发生破损,影响蔬菜的售卖。
技术实现思路
1、为了改善机械手的夹持效率较低,且在夹持蔬菜的过程中,蔬菜容易发生破损的问题,本申请提供一种具有视觉定位功能的水培蔬菜机器人采摘夹爪。
2、本申请提供的一种具有视觉定位功能的水培蔬菜机器人采摘夹爪采用如下的技术方案:
3、一种具有视觉定位功能的水培蔬菜机器人采摘夹爪,包括机械手本体,所述机械手本体的一侧设置有夹持组件,所述夹持组件对蔬菜进行夹取;所述机械手本体的一侧设置有摄像头,所述摄像头朝向靠近所述夹持组件的一侧,且所述机械手本体上设置有调节组件,所述调节组件对所述摄像头进行调节。
4、可选的,所述调节组件包括调节座,所述调节座安装在所述机械手本体上,所述调节座上设置有支撑环,所述支撑环转动连接在所述调节座上,且所述摄像头套设在所述支撑环上。
5、可选的,所述夹持组件包括第一基板与第二基板,所述第一基板与第二基板之间设置有滑块,所述滑块在所述第一基板与第二基板之间相对设置有两个,两个所述滑块上均设置有夹板。
6、可选的,所述第一基板与第二基板之间设置有驱动气缸,所述驱动气缸与所述滑块之间设置有第一连杆与第二连杆,所述第一连杆与第二连杆之间转动连接,且所述第一连杆的一端与所述滑块转动连接,所述第二连杆的一端转动连接在所述第一基板与第二基板之间;所述驱动气缸上设置有齿条,所述第二连杆上设置有齿轮,所述齿条与所述齿轮啮合。
7、可选的,所述第一基板与第二基板之间设置有导向杆,所述滑块上开设有导向槽,所述滑块通过所述导向槽与所述导向杆滑移配合。
8、可选的,所述夹板呈弯折设置,且所述夹板弯折处形成有避让槽,两个所述夹板上的所述避让槽朝向相互靠近的一侧。
9、可选的,所述夹板上设置有橡胶条,所述橡胶条连接在所述夹板靠近所述避让槽的一侧。
10、综上所述,本申请包括以下至少一种具有视觉定位功能的水培蔬菜机器人采摘夹爪有益技术效果:
11、使用前,通过调节组件对摄像头的位置进行调节,将摄像头朝向夹持组件的一侧,使用过程中,通过摄像头对水培蔬菜的位置进行定位,然后机械手本体将夹持组件向需要夹取的蔬菜移动,通过夹持组件对蔬菜进行夹取,使得机械手本体能够精确的定位蔬菜位置,提升机械手本体的夹持效率,防止夹持组件在夹持蔬菜的过程中蔬菜发生破损,提升蔬菜的售卖效果。
技术特征:
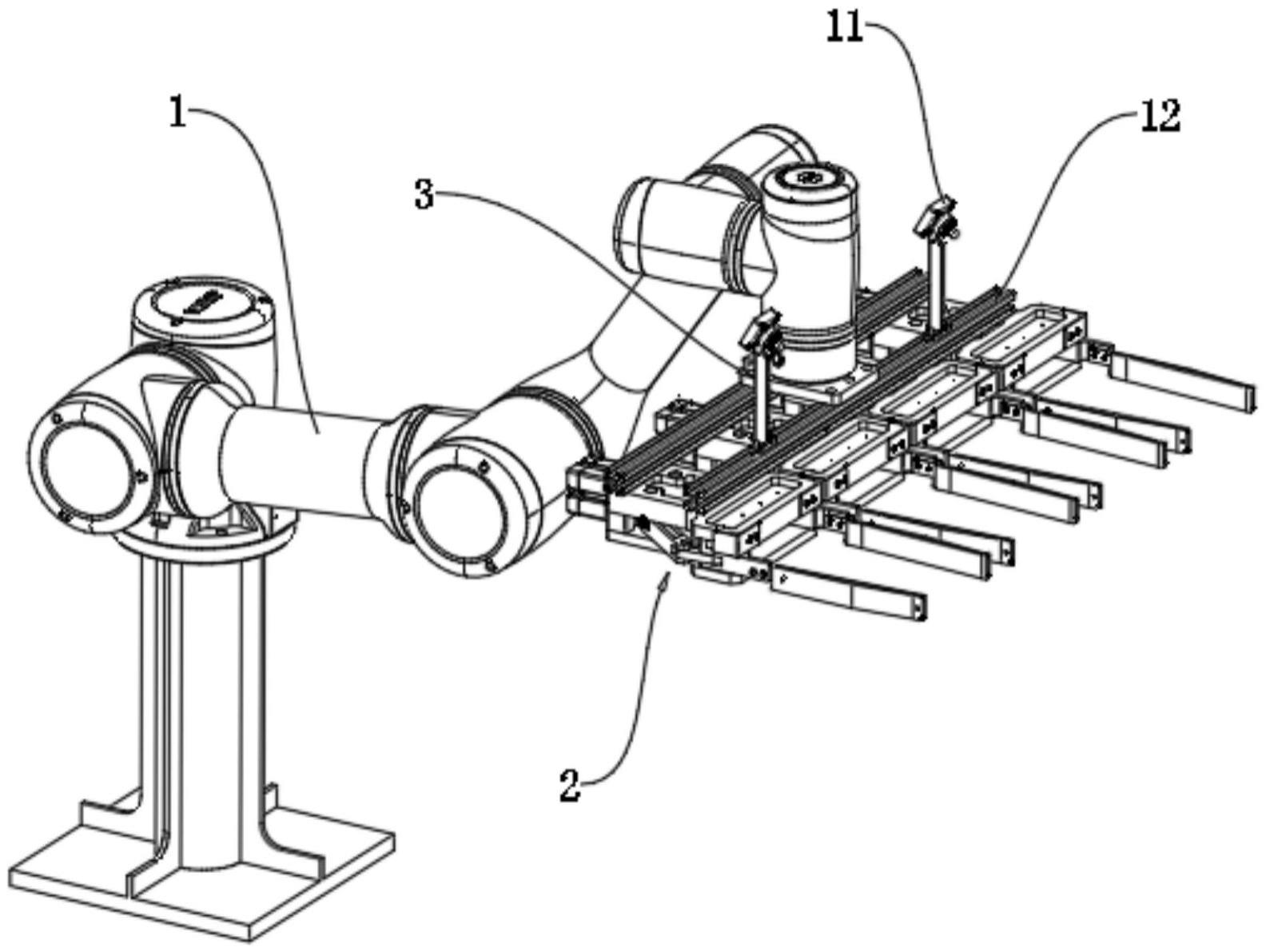
1.一种具有视觉定位功能的水培蔬菜机器人采摘夹爪,包括机械手本体(1),其特征在于:所述机械手本体(1)的一侧设置有夹持组件(2),所述夹持组件(2)对蔬菜进行夹取;所述机械手本体(1)的一侧设置有摄像头(11),所述摄像头(11)朝向靠近所述夹持组件(2)的一侧,且所述机械手本体(1)上设置有调节组件(3),所述调节组件(3)对所述摄像头(11)进行调节。
2.根据权利要求1所述的一种具有视觉定位功能的水培蔬菜机器人采摘夹爪,其特征在于:所述调节组件(3)包括调节座(31),所述调节座(31)安装在所述机械手本体(1)上,所述调节座(31)上设置有支撑环(32),所述支撑环(32)转动连接在所述调节座(31)上,且所述摄像头(11)套设在所述支撑环(32)上。
3.根据权利要求1所述的一种具有视觉定位功能的水培蔬菜机器人采摘夹爪,其特征在于:所述夹持组件(2)包括第一基板(21)与第二基板(22),所述第一基板(21)与第二基板(22)之间设置有滑块(25),所述滑块(25)在所述第一基板(21)与第二基板(22)之间相对设置有两个,两个所述滑块(25)上均设置有夹板(27)。
4.根据权利要求3所述的一种具有视觉定位功能的水培蔬菜机器人采摘夹爪,其特征在于:所述第一基板(21)与第二基板(22)之间设置有驱动气缸(4),所述驱动气缸(4)与所述滑块(25)之间设置有第一连杆(42)与第二连杆(43),所述第一连杆(42)与第二连杆(43)之间转动连接,且所述第一连杆(42)的一端与所述滑块(25)转动连接,所述第二连杆(43)的一端转动连接在所述第一基板(21)与第二基板(22)之间;所述驱动气缸(4)上设置有齿条(45),所述第二连杆(43)上设置有齿轮(46),所述齿条(45)与所述齿轮(46)啮合。
5.根据权利要求3所述的一种具有视觉定位功能的水培蔬菜机器人采摘夹爪,其特征在于:所述第一基板(21)与第二基板(22)之间设置有导向杆(24),所述滑块(25)上开设有导向槽(251),所述滑块(25)通过所述导向槽(251)与所述导向杆(24)滑移配合。
6.根据权利要求3所述的一种具有视觉定位功能的水培蔬菜机器人采摘夹爪,其特征在于:所述夹板(27)呈弯折设置,且所述夹板(27)弯折处形成有避让槽(271),两个所述夹板(27)上的所述避让槽(271)朝向相互靠近的一侧。
7.根据权利要求6所述的一种具有视觉定位功能的水培蔬菜机器人采摘夹爪,其特征在于:所述夹板(27)上设置有橡胶条(28),所述橡胶条(28)连接在所述夹板(27)靠近所述避让槽(271)的一侧。
技术总结
本申请涉及一种具有视觉定位功能的水培蔬菜机器人采摘夹爪,涉及水培蔬菜技术领域,其包括机械手本体,所述机械手本体的一侧设置有夹持组件,所述夹持组件对蔬菜进行夹取;所述机械手本体的一侧设置有摄像头,所述摄像头朝向靠近所述夹持组件的一侧,且所述机械手本体上设置有调节组件,所述调节组件对所述摄像头进行调节。本申请使得机械手本体能够精确的定位蔬菜位置,提升机械手本体的夹持效率,防止夹持组件在夹持蔬菜的过程中蔬菜发生破损,提升蔬菜的售卖效果。
技术研发人员:杜万和
受保护的技术使用者:上海曼文勒思数字科技有限公司
技术研发日:20221201
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!