一种二自由度水下机械臂的制作方法
本技术涉及机械臂,尤其涉及一种二自由度水下机械臂。
背景技术:
1、目前,随着对海洋与湖泊的开发,需要通过水下机械臂代替人工进行作用,可以达到人工不能达到的操作。
2、但现有技术中,水下机械臂尺寸重量较大,并且结构复杂,不便于进行携带,难以与中小型水下机器人相匹配,并且自由度单一,只具有一个夹取功能,无法满足机械臂在水下的多样作业需求。
技术实现思路
1、本实用新型的目的在于提供一种二自由度水下机械臂,旨在解决现有技术中的水下机械臂尺寸重量较大,并且结构复杂,不便于进行携带,难以与中小型水下机器人相匹配,并且自由度单一,只具有一个夹取功能,无法满足机械臂在水下的多样作业需求的技术问题。
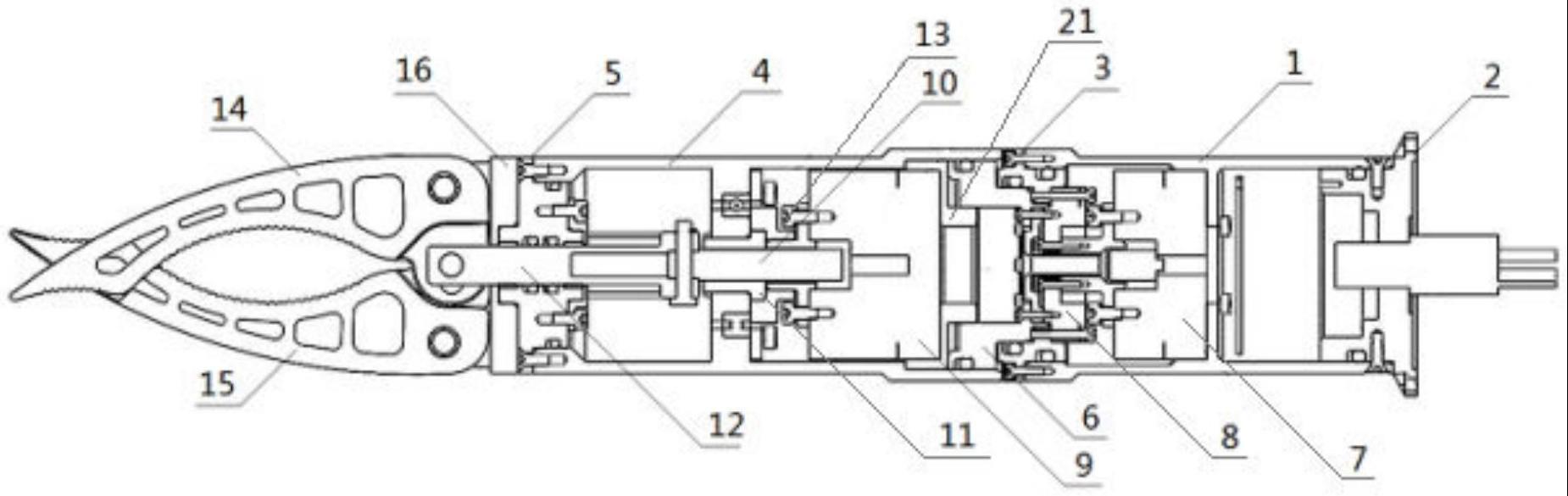
2、为实现上述目的,本实用新型采用的一种二自由度水下机械臂,包括壳体、旋转组件、作业组件和输出组件,所述旋转组件设置于所述壳体的内部,所述作业组件设置于所述壳体的内部,并位于所述旋转组件的一端,所述输出组件设置于所述作业组件的输出端。
3、其中,所述壳体包括一轴外壳、底座法兰、减速机固定法兰、减速机输出法兰、二轴外壳、二轴端盖和电机固定板,所述一轴外壳与所述底座法兰固定连接,并位于所述底座法兰的一侧,所述减速机固定法兰设置于所述一轴外壳的一侧,所述电机固定板与所述减速机输出法兰轴销连接,所述二轴外壳与所述减速机输出法兰固定连接,并位于所述电机固定板的一侧,所述二轴端盖与所述二轴外壳固定连接,并位于所述二轴外壳的一端。
4、其中,所述旋转组件包括一轴电机和减速机,所述一轴电机设置于所述一轴外壳的内部,所述减速机设置于所述一轴外壳的内部,且所述减速机的输入端与所述一轴电机的输出端固定连接,所述减速机的输出端与所述减速机输出法兰固定连接,所述减速机与所述减速机固定法兰固定连接。
5、其中,所述作业组件包括二轴电机、丝杠、丝杠螺母、推杆和二轴电机输出法兰,所述二轴电机设置于所述二轴外壳的内部,且所述二轴电机与所述电机固定板固定连接,所述二轴电机输出法兰与所述二轴电机的输出端固定连接,并位于所述二轴电机输出端的一侧,所述丝杠螺母与所述二轴电机输出法兰轴销连接,并位于所述二轴电机输出法兰的一侧,所述丝杠设置于所述丝杠螺母的一侧,所述推杆与所述丝杠轴销连接,并位于所述丝杠的一端。
6、其中,所述输出组件包括夹爪r、夹爪l和夹爪底座,所述夹爪r和所述夹爪l分别与所述夹爪底座销轴连接,并且所述夹爪r和所述夹爪l分别与所述推杆轴销连接,所述夹爪底座与所述二轴端盖固定连接,并位于所述二轴端盖的一侧。
7、其中,所述输出组件包括刀片压板、刀片底座、刀片配合块和刀片本体,所述刀片底座与所述二轴端盖固定连接,并位于所述二轴端盖的一侧,所述刀片配合块与所述推杆轴销连接,所述刀片压板与所述刀片底座固定连接,并位于所述刀片底座的一侧,所述刀片本体设置于所述刀片底座的一侧。
8、本实用新型的一种二自由度水下机械臂的有益效果为:通过可以更换所述输出组件可以使得所述二自由度水下机械臂具备夹取和切割的功能,突破了机械臂功能的单一化,可适用于更广范围的使用和作业场景,可对关节和所述输出组件进行快速组装与更换,便于装配与检修,使得整个机构更加紧凑合理,轻巧便捷,并且纯电驱动操作简单,可靠性高。
技术特征:
1.一种二自由度水下机械臂,其特征在于,
2.如权利要求1所述的一种二自由度水下机械臂,其特征在于,
3.如权利要求2所述的一种二自由度水下机械臂,其特征在于,
4.如权利要求3所述的一种二自由度水下机械臂,其特征在于,
5.如权利要求4所述的一种二自由度水下机械臂,其特征在于,
6.如权利要求4所述的一种二自由度水下机械臂,其特征在于,
技术总结
本技术涉及机械臂技术领域,具体公开了一种二自由度水下机械臂,包括壳体、旋转组件、作业组件和输出组件,旋转组件设置于壳体的内部,作业组件设置于壳体的内部,并位于旋转组件的一端,输出组件设置于作业组件的输出端。以上结构的设置,可以更换输出组件可以使得二自由度水下机械臂具备夹取和切割的功能,突破了机械臂功能的单一化,可适用于更广范围的使用和作业场景,可对关节和输出组件进行快速组装与更换,便于装配与检修,使得整个机构更加紧凑合理,轻巧便捷,并且纯电驱动操作简单,可靠性高。
技术研发人员:袁丹
受保护的技术使用者:南京华研动密封科技有限公司
技术研发日:20221130
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!