一种机器人的关节结构的制作方法
本技术涉及机器人设备,特别是涉及一种机器人的关节结构。
背景技术:
1、目前,机器人的关节结构主要有单支撑和双支撑两种结构方式,并且双支撑结构的刚性和强度都好于单支撑结构。但目前机器人关节结构使用的双支撑结构存在如下技术缺陷:
2、减速机的安装精度受多个臂体和安装板等零件加工精度及装配度影响,加工要求高、成本高。
技术实现思路
1、基于此,本实用新型提供一种机器人的关节结构,以解决现有技术中机器人的关节结构中减速机的安装精度受多个臂体和安装板等零件加工精度及装配度影响,导致加工要求高、成本高的问题。
2、本实用新型提供了一种机器人的关节结构,所述机器人的关节结构包括:
3、壳体;
4、固定于所述壳体上的第一臂体;
5、与所述第一臂体活动连接的第二臂体;
6、固定于所述第二臂体一端的第一运动部件;
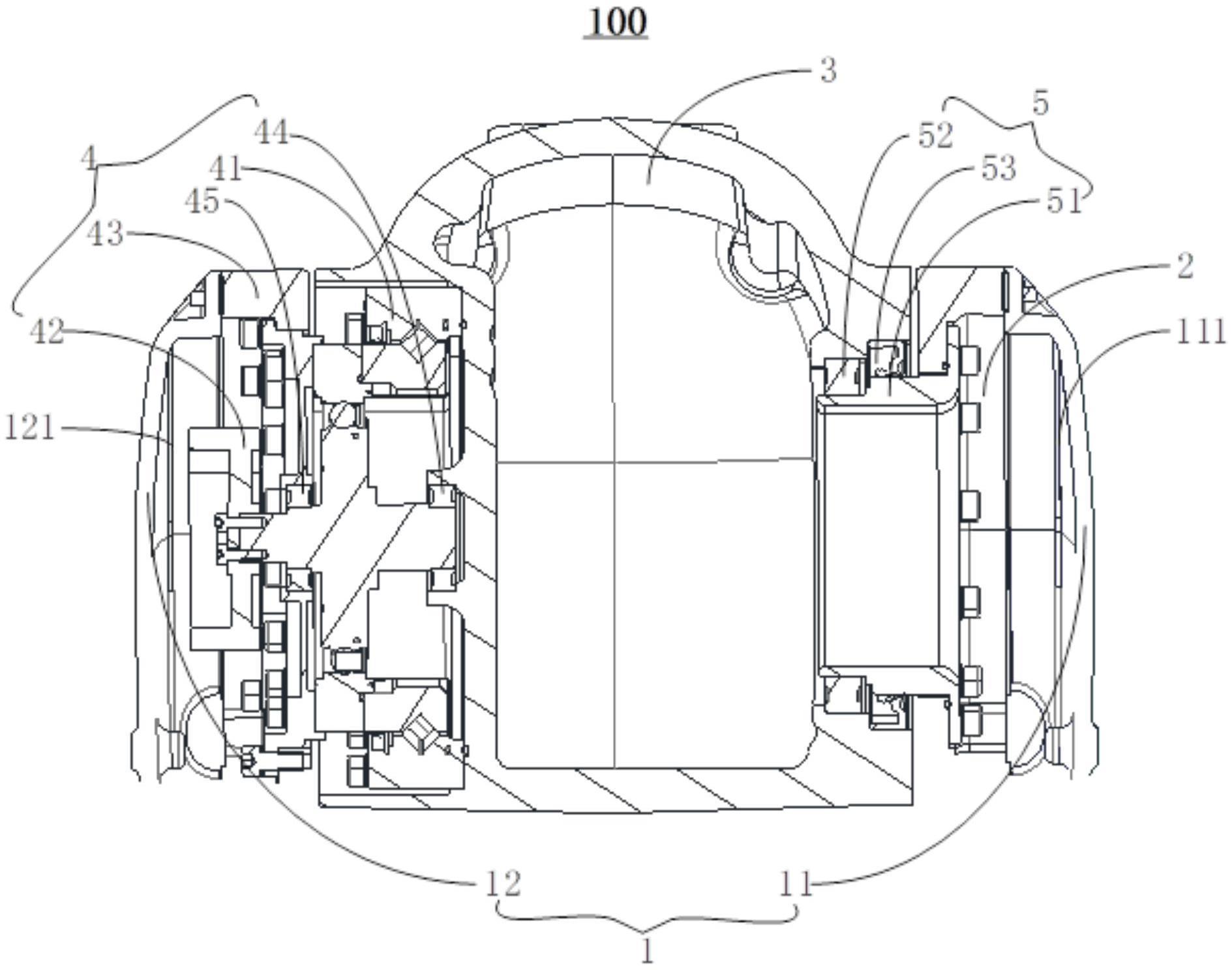
7、所述第一运动部件包括:固定于所述第二臂体一端的减速机、与所述减速机固定连接的带轮、设于所述减速机和所述带轮之间的安装板、设于所述减速机与所述第二臂体之间的第一轴承以及设于所述减速机与所述安装板之间的第二轴承,所述第一轴承的外圈与所述第二臂体固定连接,所述第一轴承的内圈与所述减速机固定连接,所述第二轴承的外圈与所述安装板固定连接,所述第二轴承的内圈与所述减速机固定连接;
8、所述带轮驱动所述减速机转动,通过所述第一轴承带动所述第二臂体一起转动,以使所述第二臂体与所述第一臂体之间产生相对转动。
9、优选的,所述机器人的关节结构还包括:设于所述第二臂体另一端且与所述第二臂体固定连接的第二运动部件,所述第一运动部件旋转时,通过所述第二臂体带动所述第二运动部件一起旋转。
10、优选的,所述第二运动部件包括:支撑筒以及套设于所述支撑筒外的支撑轴承,所述支撑轴承的外圈与所述第二臂体固定连接,所述支撑轴承的内圈与所述支撑筒连接。
11、优选的,所述第二运动部件还包括:套设在所述支撑筒上的骨架油封,所述骨架油封靠近所述支撑轴承设置。
12、优选的,所述减速机包括:连接轴、套设于所述连接轴上的波发生器、与所述波发生器活动连接的柔轮、与所述柔轮啮合的刚轮,所述刚轮固定于所述第二臂体的一端,所述连接轴的一端与所述第一轴承的内圈固定连接,所述连接轴的另一端与所述第二轴承的内圈固定连接,所述连接轴穿设所述第二轴承的末端与所述带轮固定连接。
13、优选的,所述安装板的形状与所述减速机的形状相匹配,所述安装板包括径向依次排列的第一孔位、第二孔位、第三孔位,所述第一孔位用于连接所述波发生器,所述第二孔位用于连接所述柔轮,所述第三孔位用于连接所述刚轮。
14、优选的,所述第一臂体包括主体部、第一连接部、第二连接部,所述第一连接部、所述第二连接部从所述主体部的同一端延伸形成,所述第一连接部与所述第二连接部之间存有用于安装所述第二臂体的间隙。
15、优选的,所述第一连接部开设有第一通孔,所述第二连接部开设有第二通孔,所述第二臂体两侧分别通过所述第一通孔、所述第二通孔与所述第一臂体活动连接。
16、优选的,所述壳体包括盖设于所述第一连接部上的第一壳体、盖设于所述第二连接部上的第二壳体。
17、优选的,所述第一壳体通过第一密封圈与所述第一连接部连接,所述第二壳体通过第二密封圈与所述第二连接部连接。
18、本实用新型的有益效果在于:通过设置固定于壳体上的第一臂体、固定于壳体上并与第一臂体活动连接的第二臂体以及固定于第二臂体一端的第一运动部件;其中,第一运动部件包括:固定于第二臂体一端的减速机、与减速机固定连接的带轮、设于减速机和带轮之间的安装板、设于减速机与第二臂体之间的第一轴承以及设于减速机与安装板之间的第二轴承,第一轴承的外圈与第二臂体固定连接,第一轴承的内圈与减速机固定连接,第二轴承的外圈与安装板固定连接,第二轴承的内圈与减速机固定连接,带轮驱动所述减速机转动,通过第一轴承带动所述第二臂体一起转动,以使第二臂体与所述第一臂体之间产生相对转动。通过上述方式,本实用新型的减速机安装精度仅受第二臂体及安装板两个零件加工精度及装配度影响,容易保证减速机的啮合精度要求,降低了加工要求及成本。
技术特征:
1.一种机器人的关节结构,其特征在于,所述机器人的关节结构包括:
2.根据权利要求1所述的机器人的关节结构,其特征在于,所述机器人的关节结构还包括:设于所述第二臂体另一端且与所述第二臂体固定连接的第二运动部件,所述第一运动部件旋转时,通过所述第二臂体带动所述第二运动部件一起旋转。
3.根据权利要求2所述的机器人的关节结构,其特征在于,所述第二运动部件包括:支撑筒以及套设于所述支撑筒外的支撑轴承,所述支撑轴承的外圈与所述第二臂体固定连接,所述支撑轴承的内圈与所述支撑筒连接。
4.根据权利要求3所述的机器人的关节结构,其特征在于,所述第二运动部件还包括:套设在所述支撑筒上的骨架油封,所述骨架油封靠近所述支撑轴承设置。
5.根据权利要求1所述的机器人的关节结构,其特征在于,所述减速机包括:连接轴、套设于所述连接轴上的波发生器、与所述波发生器活动连接的柔轮、与所述柔轮啮合的刚轮,所述刚轮固定于所述第二臂体的一端,所述连接轴的一端与所述第一轴承的内圈固定连接,所述连接轴的另一端与所述第二轴承的内圈固定连接,所述连接轴穿设所述第二轴承的末端与所述带轮固定连接。
6.根据权利要求5所述的机器人的关节结构,其特征在于,所述安装板的形状与所述减速机的形状相匹配,所述安装板包括沿径向依次排列的第一孔位、第二孔位、第三孔位,所述第一孔位用于连接所述波发生器,所述第二孔位用于连接所述柔轮,所述第三孔位用于连接所述刚轮。
7.根据权利要求1所述的机器人的关节结构,其特征在于,所述第一臂体包括主体部、第一连接部、第二连接部,所述第一连接部、所述第二连接部从所述主体部的同一端延伸形成,所述第一连接部与所述第二连接部之间存有用于安装所述第二臂体的间隙。
8.根据权利要求7所述的机器人的关节结构,其特征在于,所述第一连接部开设有第一通孔,所述第二连接部开设有第二通孔,所述第二臂体两侧分别通过所述第一通孔、所述第二通孔与所述第一臂体活动连接。
9.根据权利要求8所述的机器人的关节结构,其特征在于,所述壳体包括盖设于所述第一连接部上的第一壳体、盖设于所述第二连接部上的第二壳体。
10.根据权利要求9所述的机器人的关节结构,其特征在于,所述第一壳体通过第一密封圈与所述第一连接部固定连接,所述第二壳体通过第二密封圈与所述第二连接部固定连接。
技术总结
本技术涉及机器人设备技术领域,公开了一种机器人的关节结构,包括:壳体;与固定于壳体上的第一臂体活动连接的第二臂体;固定于第二臂体一端的第一运动部件包括:第二臂体一端固定的减速机、与减速机固定连接的带轮、减速机和带轮之间的安装板、第一轴承及第二轴承;第一轴承的外圈与第二臂体固定连接、内圈与减速机固定连接;第二轴承的外圈与安装板固定连接、内圈与减速机固定连接;带轮驱动减速机转动,通过第一轴承带动第二臂体一起转动,以使第二臂体与第一臂体之间产生相对转动。通过上述方式,本技术的减速机安装精度仅受第二臂体及安装板两个零件加工精度及装配度影响,容易保证减速机的啮合精度要求,降低了加工要求及成本。
技术研发人员:余永耀,黄绍平,熊长炜
受保护的技术使用者:广东天机智能系统有限公司
技术研发日:20221205
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!