一种机械夹爪的制作方法
本技术涉及自动化设备领域,具体为一种机械夹爪。
背景技术:
1、对于粉丝的包装,常见的形式之一为在成捆的粉丝外侧缠绕纸质标签,然后用胶贴将标签两端进行粘合。这一工作过程目前依然依靠人工操作进行作业,一方面工作效率较低,另外一方面捆扎包装的质量不能保证稳定的质量。
2、在粉丝捆扎的自动化包装环节中,对于成捆粉丝的抓取,及抓取过程中如何实现标签的贴合,是必须要解决的技术问题。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种机械夹爪,解决对粉丝抓取的同时进行标签端部贴合的问题。
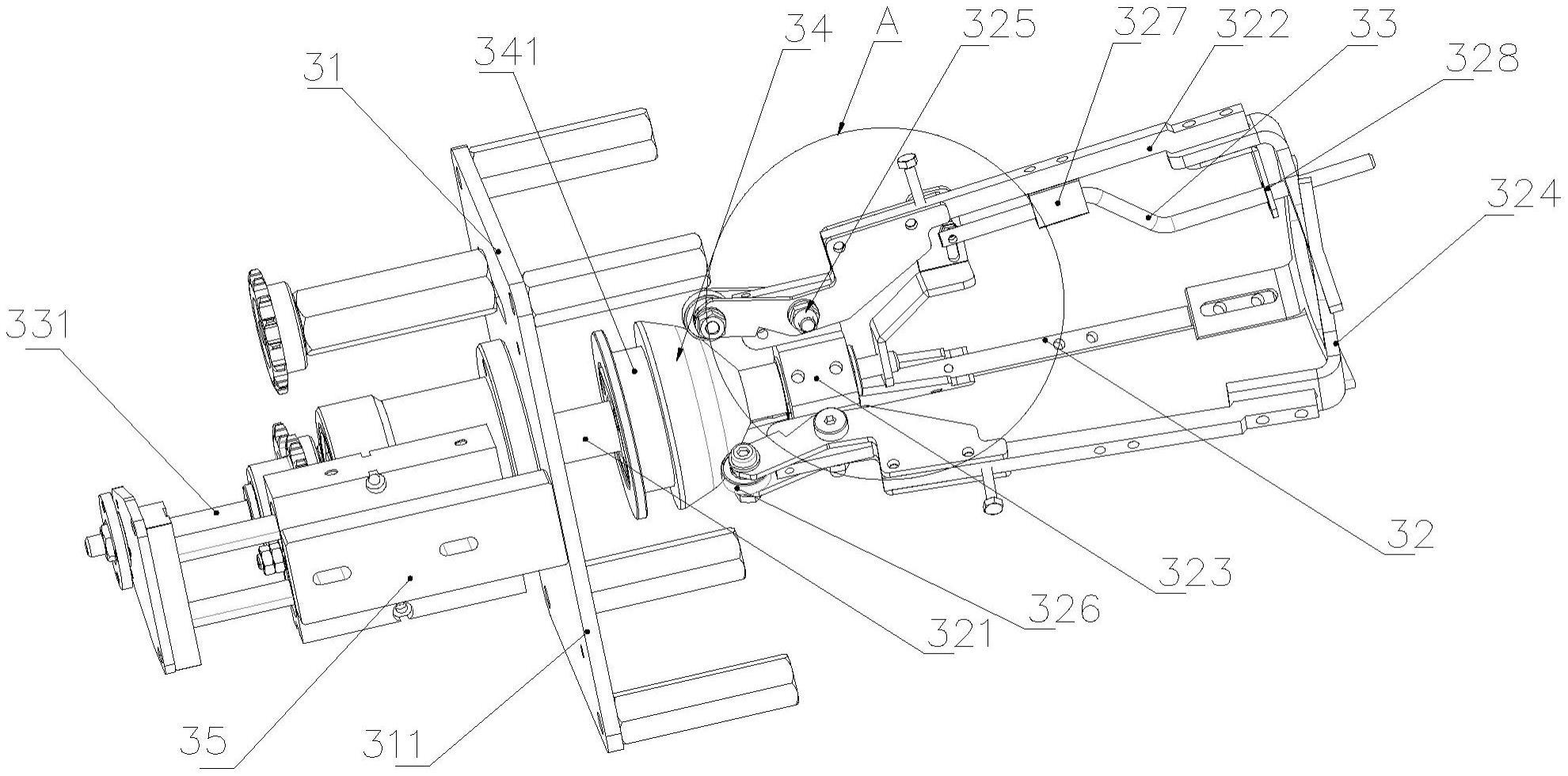
2、为实现上述目的,本实用新型提供如下技术方案:一种机械夹爪,包括夹爪支架及爪体;
3、夹爪支架,用于与外部机构结合并承载爪体,爪体与夹爪支架转动连接;
4、爪体,包括爪轴及爪指;
5、爪轴,与夹爪支架转动连接,其上固定设置爪指支块;
6、爪指,环绕爪轴设置有若干个,且与爪指支块转动连接,爪指一端设置用于包覆在成捆粉丝外侧的指板;还包括,
7、压标针,设置于爪指朝向爪轴的一侧,延伸至指板外侧,用于压住爪体内粉丝上的标签。
8、优选为,所述指板为弓形,指板的内凹面朝向爪轴的轴线设置。
9、优选为,所述爪指为杆体,爪指一端设置所述指板,另一端连接爪指驱动组件,还包括,
10、爪指转轴,靠近所述爪指驱动组件设置,爪指通过爪指转轴与所述爪指支块转动连接。
11、优选为,所述驱动组件包括,
12、爪指转轮,设置在爪指远离指板的一端;
13、爪指顶块,与所述爪轴滑动连接,一侧与所述爪指转轮相贴。
14、优选为,所述爪指顶块整体为圆锥台状,中部开设有通孔,爪指顶块与爪轴同轴设置;爪指顶块的圆周面为圆弧面,所述爪指转轮与爪指顶块的圆弧面相贴;还包括,
15、驱动槽,为环形槽,开设在爪指顶块的块体上。
16、优选为,所述夹爪支架包括夹爪支板,所述爪轴贯穿夹爪支板;还包括,
17、压标缸,缸体固定设置在夹爪支板一侧,活动端通过压标轴与压标针联动。
18、优选为,所述爪轴为空心轴杆,所述压标轴设置在爪轴内部,且与爪轴滑动连接;
19、压标轴一端与所述压标缸35的活动端连接,另一端延伸至爪轴外侧,且通过针架与所述压标针一端连接;
20、压标针与爪指连接,压标缸通过压标轴及压标针与爪指联动。
21、优选为,所述爪指还包括,
22、标针滑块,与爪指固定连接,其块体上开设贯通孔,所述压标针与标针滑块滑动连接;
23、压标针整体为弯折的杆体,包括两个平行部,及两个平行部之间的倾斜部,两个平行部的杆体轴线平行;所述倾斜部位于标针滑块朝向指板324的一侧。
24、优选为,所述爪指远离爪指支块的一端设置有标针限位板,标针限位板上开设有通孔,所述压标针贯穿标针限位板。
25、优选为,所述压标轴远离爪指的一端固定设置限位板,所述压标缸的活动端固定连接推板,推板位于所述限位板和夹爪支板之间,推板与所述压标轴转动连接。
26、与现有技术相比,具备以下有益效果:本装置利用爪指和抓板的结合形成对于成捆粉丝的抓取。在这一基础上利用压标针的杆体将粉丝上的标签压住,从而令标签贴合在粉丝外部。利用爪指顶块推动爪指,从而对所有爪指同步控制夹紧。
技术特征:
1.一种机械夹爪,其特征在于,包括夹爪支架(31)及爪体(32);
2.如权利要求1所述的机械夹爪,其特征在于,所述指板(324)为弓形,指板(324)的内凹面朝向爪轴(321)的轴线设置。
3.如权利要求1所述的机械夹爪,其特征在于,所述爪指(322)为杆体,爪指一端设置所述指板(324),另一端连接爪指驱动组件,还包括,
4.如权利要求3所述的机械夹爪,其特征在于,所述驱动组件包括,
5.如权利要求4所述的机械夹爪,其特征在于,所述爪指顶块(34)整体为圆锥台状,中部开设有通孔,爪指顶块(34)与爪轴(321)同轴设置;爪指顶块(34)的圆周面为圆弧面,所述爪指转轮(326)与爪指顶块(34)的圆弧面相贴;还包括,
6.如权利要求4所述的机械夹爪,其特征在于,所述夹爪支架(31)包括夹爪支板(311),所述爪轴(321)贯穿夹爪支板(311);还包括,
7.如权利要求6所述的机械夹爪,其特征在于,所述爪轴(321)为空心轴杆,所述压标轴(331)设置在爪轴(321)内部,且与爪轴(321)滑动连接;
8.如权利要求7所述的机械夹爪,其特征在于,所述爪指(322)还包括,
9.如权利要求8所述的机械夹爪,其特征在于,所述爪指(322)远离爪指支块(323)的一端设置有标针限位板(328),标针限位板(328)上开设有通孔,所述压标针(33)贯穿标针限位板(328)。
10.如权利要求7所述的机械夹爪,其特征在于,所述压标轴(331)远离爪指(322)的一端固定设置限位板,所述压标缸(35)的活动端固定连接推板,推板位于所述限位板和夹爪支板(311)之间,推板与所述压标轴(331)转动连接。
技术总结
本技术公开一种机械夹爪,涉及自动化设备领域,技术方案为,包括夹爪支架及爪体;夹爪支架,用于与外部机构结合并承载爪体,爪体与夹爪支架转动连接;爪体,包括爪轴及爪指;爪轴,与夹爪支架转动连接,其上固定设置爪指支块;爪指,环绕爪轴设置有若干个,且与爪指支块转动连接,爪指一端设置用于包覆在成捆粉丝外侧的指板;还包括,压标针,设置于爪指朝向爪轴的一侧,延伸至指板外侧,用于压住爪体内粉丝上的标签。本技术的有益效果是,本装置利用爪指和抓板的结合形成对于成捆粉丝的抓取。在这一基础上利用压标针的杆体将粉丝上的标签压住,从而令标签贴合在粉丝外部。利用爪指顶块推动爪指,从而对所有爪指同步控制夹紧。
技术研发人员:解佃洪,李震
受保护的技术使用者:青岛同晋自动化科技有限公司
技术研发日:20221212
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!