一种焊接机器人手关节的制作方法
本技术涉及一种焊接机器人手关节,属于焊接设备。
背景技术:
1、焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。根据国际标准化组织(iso)工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机(manipulator),具有三个或更多可编程的轴,用于工业自动化领域。为了适应不同的用途,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器。焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能进行焊接,切割或热喷涂。
2、焊接机器人多功能活动补偿手关节是一种能模仿人体手动作,以实现对焊接机器人焊枪焊接时焊接位置的补偿及保证焊枪回原点时复位的精度的装置,其能够有效降低人员劳动负荷,提高工作效率,现在在焊接机器人领域里没有可以对焊枪进行有效补偿的装置,因此现有的焊接机器人无法实现对焊接位置的补偿,焊接精度低。
技术实现思路
1、鉴于以上所述现有技术的缺点,本实用新型的目的在于提供一种焊接机器人手关节,用于解决现有技术中现在在焊接机器人领域里没有可以对焊枪进行有效补偿的装置,因此现有的焊接机器人无法实现对焊接位置的补偿,焊接精度低的问题。
2、为实现上述目的及其他相关目的,本实用新型提供一种焊接机器人手关节,包括相配合连接的外法兰和内法兰,内法兰转动套设在外法兰内部,所述内法兰与外法兰之间设置在内法兰和外法兰相对旋转时压缩,并在内法兰停止旋转后对内法兰施力使其复位的弹性件。
3、于本实用新型的一实施例中,所述外法兰内部中间固定连接有芯轴,所述内法兰与芯轴转动连接。
4、于本实用新型的一实施例中,所述外法兰内部中间设置安装槽,所述芯轴通过螺栓固定连接在安装槽中。
5、于本实用新型的一实施例中,所述内法兰与芯轴连接处两侧均设置轴承安装槽,轴承安装槽内部嵌入设置有轴承。
6、于本实用新型的一实施例中,所述外法兰内部底面对称设置有两条第一弧形槽,所述内法兰内部底面对应设置两条第二弧形槽,所述弹性件嵌入设置在相对应的第一弧形槽和第二弧形槽中,所述弹性件一端与第一弧形槽一端固定连接,另一端固定连接于第二弧形槽一端。
7、通过采用这种技术方案:在焊接机器人进行焊接作业时,内法兰和外法兰相对转动,内法兰和外法兰内部的第二弧形槽和第一弧形槽相对转动,转动过程中第二弧形槽和第一弧形槽内部的弹簧被压缩,当驱动内法兰和外法兰相对转动的力卸载时,压缩的弹簧对内法兰和外法兰施力,在弹簧的弹性力作用下内法兰和外法兰相对运动复位。
8、于本实用新型的一实施例中,所述弹性件采用弹簧。
9、如上所述,本实用新型的一种焊接机器人手关节,具有以下有益效果:
10、本实用新型中在外法兰和内法兰之间设置了两个弹簧,在内法兰和外法兰相对旋转时,弹簧压缩,当旋转力卸去后在弹簧弹性力的作用下驱动内法兰和外法兰复位,有效实现了内法兰和外法兰之间的精确复位,从而对焊枪进行有效补偿,提高了焊接机器人的焊接精度,有效降低人员劳动负荷,提高焊接效率,且装置结构简单,维护检修方便,使用成本低。
技术特征:
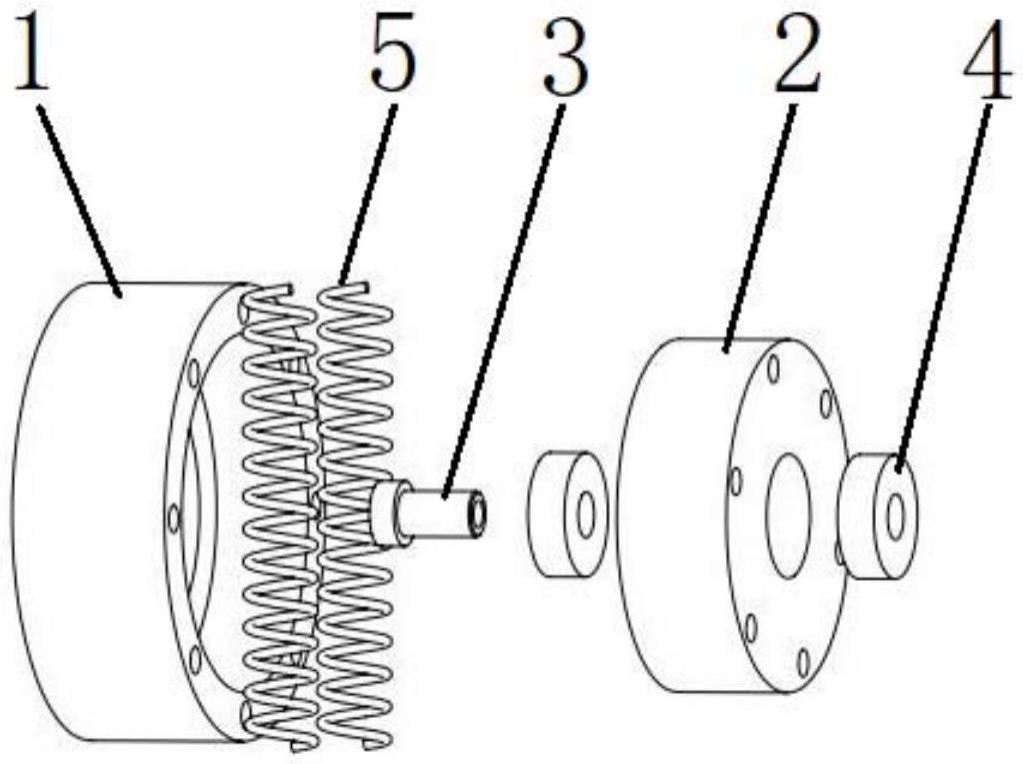
1.一种焊接机器人手关节,包括相配合连接的外法兰(1)和内法兰(2),内法兰(2)转动套设在外法兰(1)内部,其特征在于,所述内法兰(2)与外法兰(1)之间设置在内法兰(2)和外法兰(1)相对旋转时压缩,并在内法兰(2)停止旋转后对内法兰(2)施力使其复位的弹性件(5)。
2.根据权利要求1所述的一种焊接机器人手关节,其特征在于:所述外法兰(1)内部中间固定连接有芯轴(3),所述内法兰(2)与芯轴(3)转动连接。
3.根据权利要求2所述的一种焊接机器人手关节,其特征在于:所述外法兰(1)内部中间设置安装槽(7),所述芯轴(3)通过螺栓固定连接在安装槽(7)中。
4.根据权利要求2所述的一种焊接机器人手关节,其特征在于:所述内法兰(2)与芯轴(3)连接处两侧均设置轴承安装槽(9),轴承安装槽(9)内部嵌入设置有轴承(4)。
5.根据权利要求1所述的一种焊接机器人手关节,其特征在于:所述外法兰(1)内部底面对称设置有两条第一弧形槽(6),所述内法兰(2)内部底面对应设置两条第二弧形槽(8),所述弹性件(5)嵌入设置在相对应的第一弧形槽(6)和第二弧形槽(8)中,所述弹性件(5)一端与第一弧形槽(6)一端固定连接,另一端固定连接于第二弧形槽(8)一端。
6.根据权利要求5所述的一种焊接机器人手关节,其特征在于:所述弹性件(5)采用弹簧。
技术总结
本技术提供一种焊接机器人手关节,属于焊接设备技术领域。本技术包括相配合连接的外法兰和内法兰,内法兰转动套设在外法兰内部,内法兰与外法兰之间设置在内法兰和外法兰相对旋转时压缩,并在内法兰停止旋转后对内法兰施力使其复位的弹性件,外法兰内部底面对称设置有两条第一弧形槽,所述内法兰内部底面对应设置两条第二弧形槽,所弹性件嵌入设置在相对应的第一弧形槽和第二弧形槽中,本技术有效实现了内法兰和外法兰之间的精确复位,从而对焊枪进行有效补偿,提高了焊接机器人的焊接精度,有效降低了人员劳动负荷,提高了焊接效率。
技术研发人员:王翚,王学军,丁威
受保护的技术使用者:上海杰销自动化科技有限公司
技术研发日:20221213
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!