工件排料机械手装置的制作方法
本技术涉及机械手排料,特别涉及工件排料机械手装置。
背景技术:
1、在自动化工业生产过程中,要实现自动安装时,往往需要所有的工件都是按照规则排布好才能更加精准地组装,这使工件的排料至关重要,传统的排料方式多采用振动盘设备对物料进行排料,但是有一些工件由于工件自身的形状原因,很难使物料朝向相同,同时对于零部件较小的工件则很难使用振动盘进行排料,针对这种情况,有使用机械手对物料位置进行检测和矫正,而实现排料,传统方式多采用单臂机械手,使其根据预定的路径,在预定的位置上夹取工件或按预定的位置放置工件,普遍都是固定安装在固定的轨道上进行排料的,难以完成物料的跨区域转运。
2、机械手的多角度转动则广泛应用在排料领域内,现有的机械手主要包括基台、臂部和夹持部,臂部多角度旋转安装在基台上,臂部包括第一臂部、第二臂部、第三臂部和第四臂部,第一臂部通过第一转动轴转动铰接于所述基台,第一转动轴的轴线沿上下方向延伸;第二臂部竖向设置,第二臂部的下端通过第二转动轴转动铰接于所述第一臂部上,第二转动轴的轴线方向与第一转动轴的轴线方向相互垂直,第三臂部处于第二臂部的上方,并通过第三转动轴转动铰接在第二臂部上部,且第三转动轴的轴线方向与第二转动轴的轴线方向相互平行,第四臂部呈向下倾斜设置,第四臂部的上端通过第四转动轴活动铰接于第三臂部上,第四转动轴的轴线方向与第三转动轴的轴线方向呈锐角夹角设置,所述夹持部固定安装在第四臂部的下端,所述夹持部为手指气缸,使用时,利用手指气缸的两夹爪的相向平移和相背平移实现对工件的夹放操作,再利用第一臂部、第二臂部、第三臂部及第四臂部的旋转使手指气缸能呈不同角度俯仰调节及360度周向角度调节,使工件能从一个区域转送至另一个区域。然而,工件呈若干种尺寸,而手指气缸的行程有限,只能适用于一些尺寸的夹紧,适用范围较为局限。
3、有鉴于此,本案发明人对上述问题进行深入研究,遂有本案产生。
技术实现思路
1、本实用新型的目的在于提供工件排料机械手装置,以解决现有的机械手的夹持部针对不同的工件的拿取具有局限性的问题。
2、为了达到上述目的,本实用新型采用这样的技术方案:
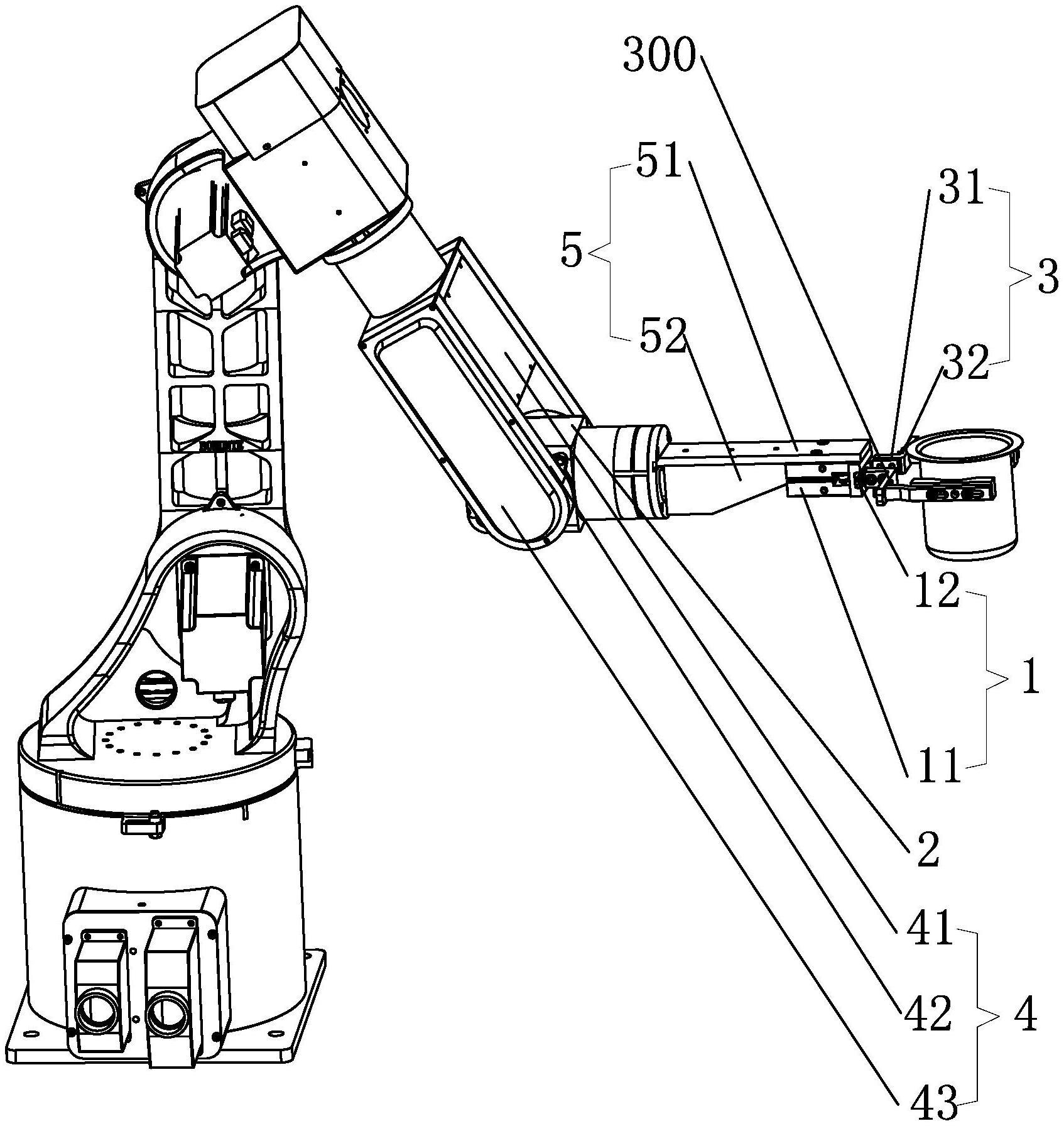
3、工件排料机械手装置,包括基台、臂部和夹持部,臂部安装在基台上,夹持部安装在臂部的输出端上,夹持部具有手指气缸,手指气缸具有缸体和两个相向及相背平移的夹爪,其特征在于:上述夹持部还包括有铰接块和夹持块,铰接块的第一端以能调节倾仰角度的方式安装在上述臂部的输出端上,手指气缸横卧安装在铰接块的第二端上,且两夹爪横向相对设置,两夹爪上均安装有上述夹持块,所述夹持块具有第一横部和与第一横部相互垂直的第二横部,第一横部与夹爪连接在一起,两第二横部相背延伸设置,且两第一横部处于两第二横部之间,两第二横部上均安装有沿第二横部的长度方向调节的调节杆,两调节杆横卧平放并相对设置,调节杆纵向所在的直线与第一横部纵向所在的直线相互平行设置,第二横部落入在第一横部与调节杆之间。
4、以手指气缸两夹爪的平移方向为前后方向,所述臂部的输出端上安装有供铰接块安装的调节安装结构,调节安装结构具有内固定块、外安装块和外拆卸板,内固定块呈方形块体结构,内固定块处于臂部的输出端下方,内固定块固定在臂部上,外安装块设有两块,两外安装块的上部安装在内固定块的前后两侧上,两所述外安装块的下部之间形成有安装空间,铰接块以能在安装空间内转动的方式安装在两外安装块上,两外安装块呈相背的一面敞开的中空结构,外拆卸板设有两个,两外拆卸板分别拆卸安装在两外安装块的敞开面上。
5、所述铰接块为一方形块体,方形块体处于两外安装块之间,方形块体的前侧壁和后侧壁均向外安装块方向设有圆形凸块,两圆形凸块上向方形块体中心处凹设有铰接槽,铰接槽呈圆形结构,两外安装块对应与铰接槽位置凸设有伸入铰接槽内的圆形块体,铰接槽的内槽壁向外安装块方向凸设有铰接轴,两外安装块相对设置的两内侧壁上对应于两铰接轴的位置处开设有供铰接轴伸入的铰接孔,两铰接轴分别伸至两外安装块的中空空间并通过安装螺栓锁固在两外安装块内。
6、所述圆形凸块的外侧壁上处于铰接槽外设有若干个第一定位孔,第一定位孔沿铰接块的周向方向均匀间隔设置,两外安装块相对设置的两内侧壁上对应于第一定位孔处开设有与两外安装块的中空空间相连通的第二定位孔,两外安装块内设有定位块,定位块上对应与第一定位孔和第二定位孔处设有能够嵌设在第一定位孔和第二定位孔内的定位杆。
7、所述铰接块的右端端面安装有固定块,固定块上设有供手指气缸安装的安装板,安装板具有平放设置的横直部和与横直部垂直设置的竖直部,横直部和竖直部均沿左右方向延伸设置,竖直部处于横直部的下方中间位置处,横直部和竖直部的左端均与固定块连接,横直部的右侧沿与竖直部的右侧沿之间具有间距,所述手指气缸的缸体安装在横直部下方并处于间距范围内,手指气缸的两夹爪伸出横直部的右侧外。
8、两所述第一横部为条形块体并沿左右方向延伸设置,两所述第一横部呈相对的一面敞开的中空结构,两夹爪分别固定在两第一横部的中空腔室内,两第二横部分别处于两第一横部相背的一面的右端端部上,两第二横部上设有沿左右方向贯穿的条形通孔,条形通孔沿前后方向延伸设置,两调节杆的左端通过固定螺栓安装分别安装在两第二横部上,所述调节杆的左端固定安装在条形通孔内。
9、调节杆具有内缩径段和外扩径段,内缩径段和外扩径段均呈条形块体结构并沿左右方向延伸设置,内缩径段的左端锁固在条形通孔内,两外扩径段处于两内缩径段的右端且处于两内缩径段相背的一侧上,内缩径和其同一侧的外扩径段之间通过连接块连接,连接块的左端从内缩径段的右端倾斜延伸至外扩径段的左端。
10、所述调节杆上设有两个沿前后方向贯通的调节孔,条形孔呈条形结构,调节孔设有两个,两调节孔沿左右方向间隔设置,两调节杆相对的一侧上安装有防滑块,防滑块上设有对应与调节孔的固定孔,防滑块通过安装螺丝依次穿过调节孔和固定孔固定安装在调节杆上,两防滑块相对的一端面上向调节杆方向凹设有槽口,槽口呈弧形结构,两槽口相对设置。
11、本实用新型的一种工件排料机械手装置,应用时,将铰接块安装在臂部的输出端上,手指气缸安装在铰接块的右端上,使第一横部安装在手指气缸的夹爪上,利用手指气缸控制第一横部和第二横部的夹持工件,再相对调节两调节杆在第二横部上的间距以适应不同尺寸的工件,在调节调节杆相对于工件的间距后,能够微调铰接块的上下俯仰角度,使夹持部相对于工件的夹持位置更加精准;与现有技术相比,利用调节杆与第二横部的配合能够夹持不同尺寸的工件,同时能够利用铰接块调节整个夹持部的俯仰角度,以解决现有的机械手的夹持部针对不同的工件的拿取具有局限性的问题。
技术特征:
1.工件排料机械手装置,包括基台、臂部和夹持部,臂部安装在基台上,夹持部安装在臂部的输出端上,夹持部具有手指气缸,手指气缸具有缸体和两个相向及相背平移的夹爪,其特征在于:上述夹持部还包括有铰接块和夹持块,铰接块的第一端以能调节倾仰角度的方式安装在上述臂部的输出端上,手指气缸横卧安装在铰接块的第二端上,且两夹爪横向相对设置,两夹爪上均安装有上述夹持块,所述夹持块具有第一横部和与第一横部相互垂直的第二横部,第一横部与夹爪连接在一起,两第二横部相背延伸设置,且两第一横部处于两第二横部之间,两第二横部上均安装有沿第二横部的长度方向调节的调节杆,两调节杆横卧平放并相对设置,调节杆纵向所在的直线与第一横部纵向所在的直线相互平行设置,第二横部落入在第一横部与调节杆之间。
2.根据权利要求1所述的工件排料机械手装置,其特征在于:以手指气缸两夹爪的平移方向为前后方向,所述臂部的输出端上安装有供铰接块安装的调节安装结构,调节安装结构具有内固定块、外安装块和外拆卸板,内固定块呈方形块体结构,内固定块处于臂部的输出端下方,内固定块固定在臂部上,外安装块设有两块,两外安装块的上部安装在内固定块的前后两侧上,两所述外安装块的下部之间形成有安装空间,铰接块以能在安装空间内转动的方式安装在两外安装块上,两外安装块呈相背的一面敞开的中空结构,外拆卸板设有两个,两外拆卸板分别拆卸安装在两外安装块的敞开面上。
3.根据权利要求2所述的工件排料机械手装置,其特征在于:所述铰接块为一方形块体,方形块体处于两外安装块之间,方形块体的前侧壁和后侧壁均向外安装块方向设有圆形凸块,两圆形凸块上向方形块体中心处凹设有铰接槽,铰接槽呈圆形结构,两外安装块对应与铰接槽位置凸设有伸入铰接槽内的圆形块体,铰接槽的内槽壁向外安装块方向凸设有铰接轴,两外安装块相对设置的两内侧壁上对应于两铰接轴的位置处开设有供铰接轴伸入的铰接孔,两铰接轴分别伸至两外安装块的中空空间并通过安装螺栓锁固在两外安装块内。
4.根据权利要求3所述的工件排料机械手装置,其特征在于:所述圆形凸块的外侧壁上处于铰接槽外设有若干个第一定位孔,第一定位孔沿铰接块的周向方向均匀间隔设置,两外安装块相对设置的两内侧壁上对应于第一定位孔处开设有与两外安装块的中空空间相连通的第二定位孔,两外安装块内设有定位块,定位块上对应与第一定位孔和第二定位孔处设有能够嵌设在第一定位孔和第二定位孔内的定位杆。
5.根据权利要求1所述的工件排料机械手装置,其特征在于:所述铰接块的右端端面安装有固定块,固定块上设有供手指气缸安装的安装板,安装板具有平放设置的横直部和与横直部垂直设置的竖直部,横直部和竖直部均沿左右方向延伸设置,竖直部处于横直部的下方中间位置处,横直部和竖直部的左端均与固定块连接,横直部的右侧沿与竖直部的右侧沿之间具有间距,所述手指气缸的缸体安装在横直部下方并处于间距范围内,手指气缸的两夹爪伸出横直部的右侧外。
6.根据权利要求1所述的工件排料机械手装置,其特征在于:两所述第一横部为条形块体并沿左右方向延伸设置,两所述第一横部呈相对的一面敞开的中空结构,两夹爪分别固定在两第一横部的中空腔室内,两第二横部分别处于两第一横部相背的一面的右端端部上,两第二横部上设有沿左右方向贯穿的条形通孔,条形通孔沿前后方向延伸设置,两调节杆的左端通过固定螺栓安装分别安装在两第二横部上,所述调节杆的左端固定安装在条形通孔内。
7.根据权利要求6所述的工件排料机械手装置,其特征在于:调节杆具有内缩径段和外扩径段,内缩径段和外扩径段均呈条形块体结构并沿左右方向延伸设置,内缩径段的左端锁固在条形通孔内,两外扩径段处于两内缩径段的右端且处于两内缩径段相背的一侧上,内缩径和其同一侧的外扩径段之间通过连接块连接,连接块的左端从内缩径段的右端倾斜延伸至外扩径段的左端。
8.根据权利要求6所述的工件排料机械手装置,其特征在于:所述调节杆上设有两个沿前后方向贯通的调节孔,条形孔呈条形结构,调节孔设有两个,两调节孔沿左右方向间隔设置,两调节杆相对的一侧上安装有防滑块,防滑块上设有对应与调节孔的固定孔,防滑块通过安装螺丝依次穿过调节孔和固定孔固定安装在调节杆上,两防滑块相对的一端面上向调节杆方向凹设有槽口,槽口呈弧形结构,两槽口相对设置。
技术总结
本技术公开工件排料机械手装置,包括臂部和夹持部,夹持部具有手指气缸、铰接块和夹持块,手指气缸具有缸体和夹爪,铰接块以能调节倾仰角度的方式安装在臂部的输出端上,缸体横卧安装在铰接块上,两夹爪上均设有夹持块,夹持块具有第一横部和第二横部,第一横部与夹爪连接在一起,两第二横部相背延伸设置,两第二横部上均安装有调节杆;应用时,将铰接块安装在臂部的输出端上,微调铰接块的上下俯仰角度,再将手指气缸安装在铰接块的右端上,相对调节两调节杆的间距以适应不同尺寸的工件;与现有技术相比,能够夹持不同尺寸的工件,同时能够调节整个夹持部的俯仰角度,以解决现有的机械手的夹持部针对不同的工件的拿取具有局限性的问题。
技术研发人员:陈强,王炳发,魏随吉
受保护的技术使用者:泉州宇诺机械有限公司
技术研发日:20221213
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!