一种缆索机器人数控夹紧机构的制作方法
本技术涉及缆索机器人,具体为一种缆索机器人数控夹紧机构。
背景技术:
1、缆索机器人是在缆索上进行移动,并且对缆索进行检查和保养用的机器人,这样就不用人员攀爬,主要就是由壳体、驱动联动机构和夹紧机构组成,夹紧机构就是具有液压调节功能的轮结构,机器人可沿任意倾斜度的缆索爬升,可爬升的缆索标高为160米,缆索倾斜度0~90(,可适应的缆索直径为90~200毫米,机器人爬升速度为8米/秒,机器人上装有钢丝绳检测系统,可沿缆索检测钢丝是否有断丝,以便及时更换缆索。
2、但是,现有缆索机器人夹紧轮在移动的时候,由于缆索表面会有杂物附着,在移动的时候容易触碰发生挤压偏移,导致稳定性差;因此,不满足现有的需求,对此我们提出了一种缆索机器人数控夹紧机构。
技术实现思路
1、本实用新型的目的在于提供一种缆索机器人数控夹紧机构,以解决上述背景技术中提出的现有缆索机器人夹紧轮在移动的时候,由于缆索表面会有杂物附着,在移动的时候容易触碰发生挤压偏移,导致稳定性差的问题。
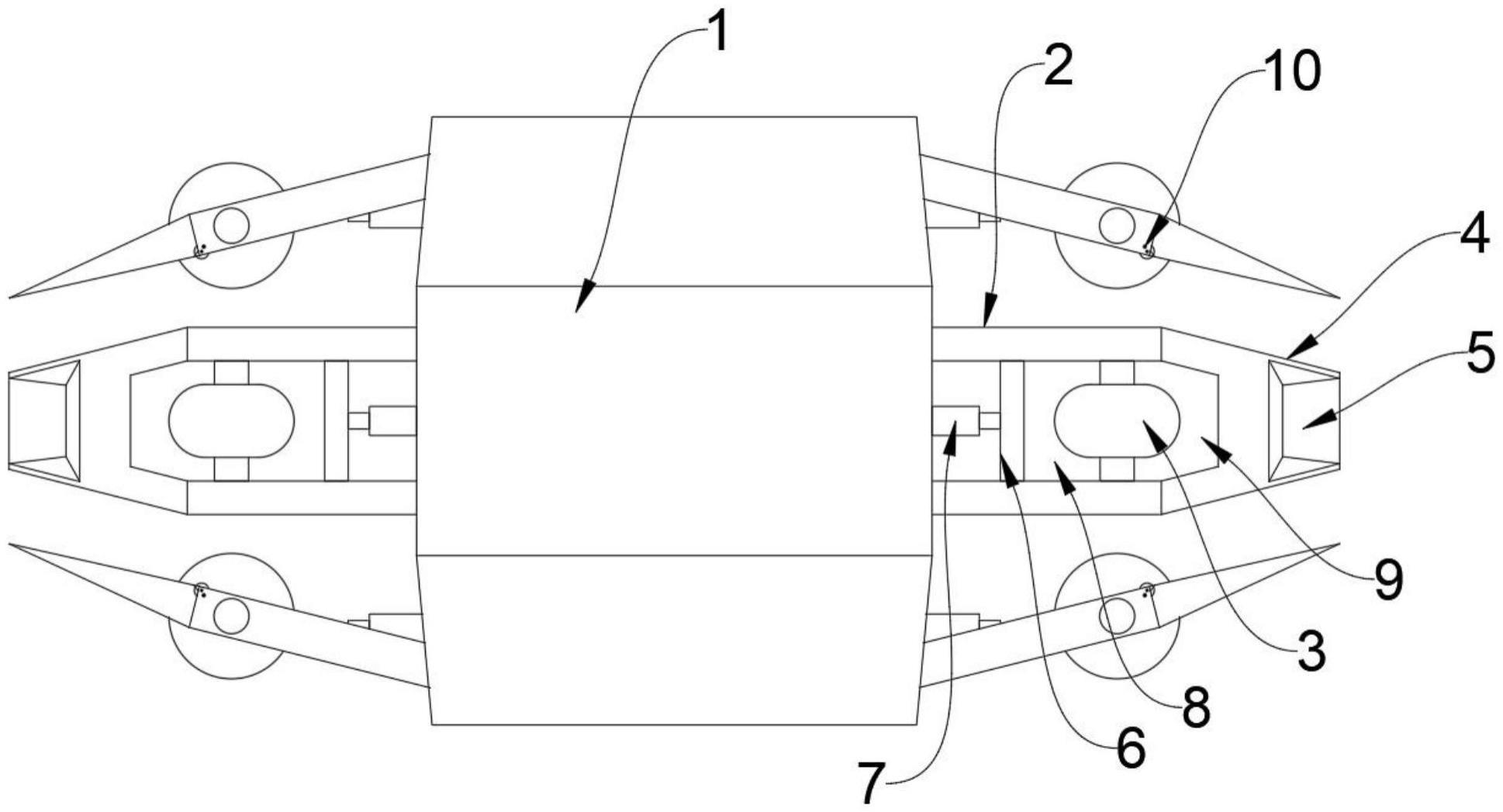
2、为实现上述目的,本实用新型提供如下技术方案:一种缆索机器人数控夹紧机构,包括:缆索机器人主体,所述缆索机器人主体两端的四周均设置有夹紧支撑架,所述夹紧支撑架的一侧设置有夹紧移动轮组件;
3、还包括:
4、清理铲板,其设置在所述夹紧支撑架的一侧,所述清理铲板一端的两侧均设置有调节板,且调节板与清理铲板为一体结构,所述调节板的内部设置有转动柱,且转动柱贯穿调节板,所述转动柱与夹紧支撑架之间通过第一滚珠轴承转动连接;
5、固定圆盘,其设置在所述调节板的一侧,且调节板与固定圆盘为一体结构。
6、优选的,所述固定圆盘的外壁设置有旋钮连接槽,且旋钮连接槽贯穿固定圆盘,所述夹紧支撑架的两侧均设置有固定旋钮,且夹紧支撑架通过固定旋钮和旋钮连接槽与固定圆盘螺纹连接。
7、优选的,所述夹紧支撑架的两端内部均设置有安装空腔,且安装空腔与夹紧支撑架为一体结构,所述安装空腔的下端面设置有下开口,且下开口与夹紧支撑架为一体结构。
8、优选的,所述清理铲板的上表面设置有杂物存放槽,且杂物存放槽与清理铲板为一体结构。
9、优选的,所述清理铲板与夹紧移动轮组件之间设置有移动轮转动腔,所述夹紧移动轮组件与夹紧支撑架之间设置有贯穿腔。
10、优选的,所述贯穿腔的内部设置有调节固定架,且调节固定架与夹紧支撑架焊接连接,所述调节固定架的一侧设置有电动推杆机构。
11、优选的,所述夹紧支撑架与缆索机器人主体的连接端均设置有第二滚珠轴承,且夹紧支撑架通过第二滚珠轴承与缆索机器人主体转动连接。
12、与现有技术相比,本实用新型的有益效果是:
13、1、本实用新型通过在夹紧支撑架一端设置清理铲板,清理铲板通过转动柱和第一滚珠轴承与夹紧支撑架连接,实现清理铲板与夹紧支撑架转动,根据实际需求转动到指定角度后,依靠固定旋钮一端贯穿夹紧支撑架与固定圆盘表面的旋钮连接槽螺纹连接,实现清理铲板固定,在缆索机器人主体移动的时候,依靠与缆索表面接触的清理铲板对附着在缆索表面的杂物进行清理,这样夹紧移动轮组件经过的时候不易与杂物触碰发生挤压偏移的现象,提高稳定性。
14、2、通过在夹紧支撑架一端两侧内部均设置安装空腔,安装空腔下端是下开口,将清理铲板的两端分别插入夹紧支撑架端口的安装空腔内部,这样可以对清理铲板的调节板和固定圆盘起到防护效果,不易受外力碰撞损坏,提高安全性。
技术特征:
1.一种缆索机器人数控夹紧机构,包括缆索机器人主体(1),所述缆索机器人主体(1)两端的四周均设置有夹紧支撑架(2),所述夹紧支撑架(2)的一侧设置有夹紧移动轮组件(3);
2.根据权利要求1所述的一种缆索机器人数控夹紧机构,其特征在于:所述固定圆盘(12)的外壁设置有旋钮连接槽(15),且旋钮连接槽(15)贯穿固定圆盘(12),所述夹紧支撑架(2)的两侧均设置有固定旋钮(10),且夹紧支撑架(2)通过固定旋钮(10)和旋钮连接槽(15)与固定圆盘(12)螺纹连接。
3.根据权利要求1所述的一种缆索机器人数控夹紧机构,其特征在于:所述夹紧支撑架(2)的两端内部均设置有安装空腔(16),且安装空腔(16)与夹紧支撑架(2)为一体结构,所述安装空腔(16)的下端面设置有下开口(17),且下开口(17)与夹紧支撑架(2)为一体结构。
4.根据权利要求1所述的一种缆索机器人数控夹紧机构,其特征在于:所述清理铲板(4)的上表面设置有杂物存放槽(5),且杂物存放槽(5)与清理铲板(4)为一体结构。
5.根据权利要求1所述的一种缆索机器人数控夹紧机构,其特征在于:所述清理铲板(4)与夹紧移动轮组件(3)之间设置有移动轮转动腔(9),所述夹紧移动轮组件(3)与夹紧支撑架(2)之间设置有贯穿腔(8)。
6.根据权利要求5所述的一种缆索机器人数控夹紧机构,其特征在于:所述贯穿腔(8)的内部设置有调节固定架(6),且调节固定架(6)与夹紧支撑架(2)焊接连接,所述调节固定架(6)的一侧设置有电动推杆机构(7)。
7.根据权利要求1所述的一种缆索机器人数控夹紧机构,其特征在于:所述夹紧支撑架(2)与缆索机器人主体(1)的连接端均设置有第二滚珠轴承(18),且夹紧支撑架(2)通过第二滚珠轴承(18)与缆索机器人主体(1)转动连接。
技术总结
本技术公开了一种缆索机器人数控夹紧机构,涉及缆索机器人技术领域,为解决现有缆索机器人夹紧轮在移动的时候,由于缆索表面会有杂物附着,在移动的时候容易触碰发生挤压偏移,导致稳定性差的问题。所述缆索机器人主体两端的四周均设置有夹紧支撑架,所述夹紧支撑架的一侧设置有夹紧移动轮组件;还包括:清理铲板,其设置在所述夹紧支撑架的一侧,所述清理铲板一端的两侧均设置有调节板,且调节板与清理铲板为一体结构,所述调节板的内部设置有转动柱,且转动柱贯穿调节板,所述转动柱与夹紧支撑架之间通过第一滚珠轴承转动连接;固定圆盘,其设置在所述调节板的一侧,且调节板与固定圆盘为一体结构。
技术研发人员:李秀
受保护的技术使用者:南京珂亿智能装备有限公司
技术研发日:20221216
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!