一种机器人的制作方法
【】本技术涉及智能设备,具体涉及一种机器人。
背景技术
0、
背景技术:
1、随着人工智能技术的发展,宠物机器人已经开始进入家庭场景,尤其是具有儿童教育和陪伴角色的宠物机器人备受家长和市场热捧,然而,现有的宠物机器人的某些部件的动作不够灵活,从而导致用户体验感差。
技术实现思路
0、
技术实现要素:
1、为解决现有技术中的问题,本实用新型提供了一种机器人。
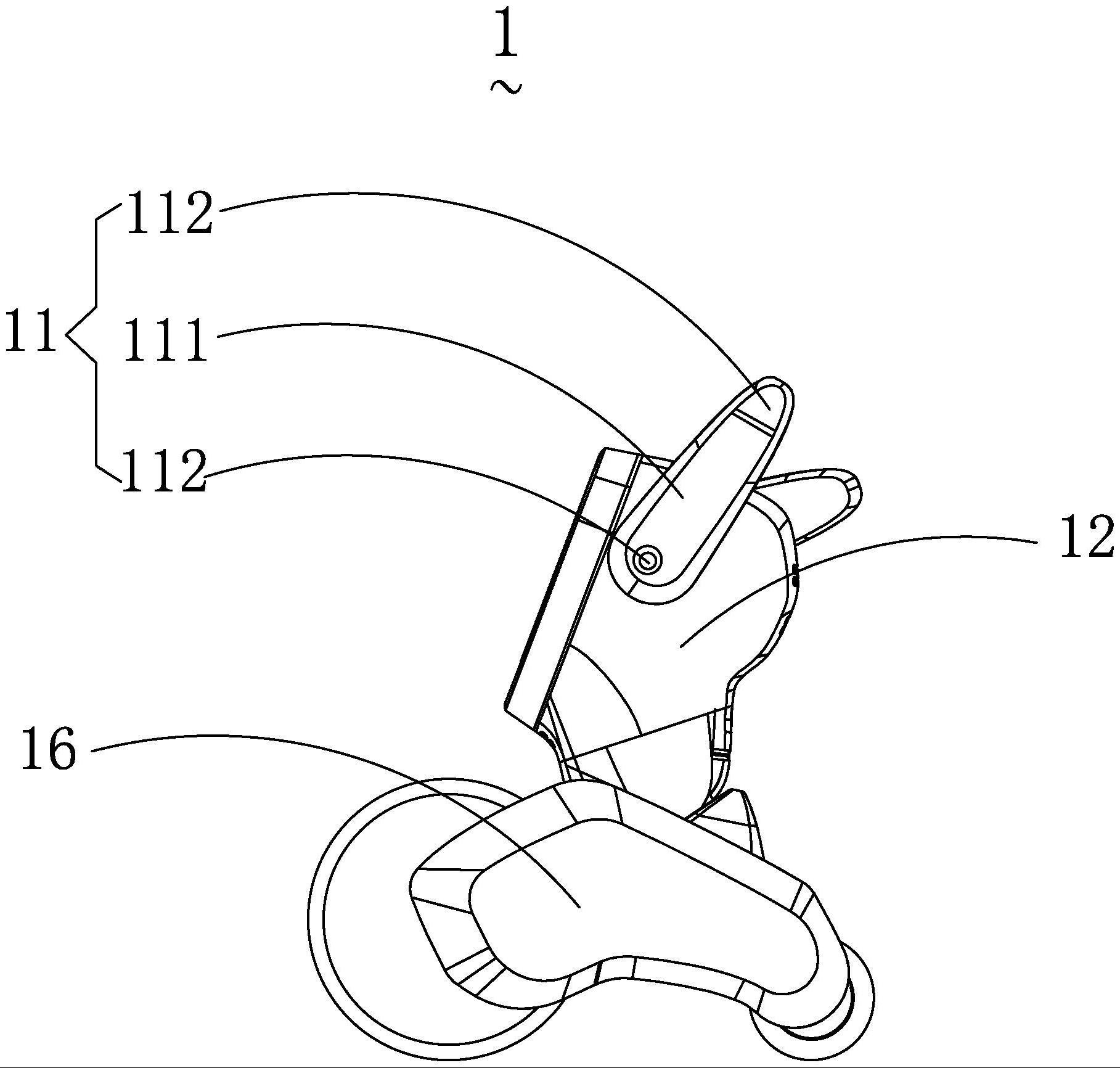
2、为解决上述问题,本发明实施例提供一种机器人,所述机器人包括:躯干模块12;感应模块17,所述感应模块17设置于所述躯干模块12上,用于检测用户交互信号;耳部组件11,所述耳部组件11活动连接于躯干模块12的相对两侧,用于在所述感应模块17检测到所述交互信号后相对所述躯干模块12转动。
3、在一些实施例中,所述耳部组件11包括耳部本体111和设置于所述耳部本体111上的发光组件112。
4、在一些实施例中,所述机器人还包括:驱动组件14,所述驱动组件14与所述耳部组件11连接,带动所述耳部组件11相对所述躯干模块12的外表面转动。
5、在一些实施例中,所述驱动组件14包括转轴141及传动结构142,所述转轴141的一端与所述传动结构142转动连接,另一端与所述耳部组件11连接。
6、在一些实施例中,所述传动结构142包括第一齿轮1422、第二齿轮1423及驱动件1421,所述驱动件1421与所述第一齿轮1422连接,所述第一齿轮1422与所述第二齿轮1423啮合连接,所述第二齿轮1423与所述转轴141连接。
7、在一些实施例中,所述机器人还包括:尾巴组件15,所述尾巴组件15与所述躯干模块12活动连接,可相对于躯干模块12伸缩或折叠。
8、在一些实施例中,所述尾巴组件15由软性材料制成。
9、在一些实施例中,所述机器人还包括:腿部模块16,所述腿部模块16活动连接于躯干模块12的相对两侧,用于带动所述机器人移动。
10、在一些实施例中,所述腿部模块16包括至少两个腿部组件161,且两个所述腿部组件161分设于所述躯干模块12的相对两侧。
11、在一些实施例中,每一所述腿部组件161包括轮架1611、驱动轮1612及从动轮1613,所述轮架1611具有相对两端,所述驱动轮1612及所述从动轮1613分别设置于所述轮架1611的相对两端。
12、与现有技术相比,本实用新型提供的机器人具有以下优点:
13、1、本实用新型的实施例提供的机器人,机器人包括耳部组件、躯干模块及控制模块,控制模块分别与耳部组件及躯干模块信号连接,耳部组件设置于躯干模块的外表面上,且控制模块可控制耳部组件相对躯干模块的外表面转动。通过此设计,控制模块能够控制耳部组件相对躯干模块的外表面转动可以增加机器人的乐趣性、互动性、智能性及时尚感以提高用户的体验感,特别是能够持续激发小朋友的乐趣以提高小朋友的智力和动手能力。此外,耳部组件包括至少一耳部本体和设置于耳部本体上的至少一个发光组件,发光组件与控制模块信号连接。通过此设计,能够实现当耳部本体转动的时候或耳部组件不转动的时候,控制模块可以改变发光组件的亮灭方式或颜色变化以进一步地增加机器人的乐趣性、互动性、智能性及时尚感,从而进一步地提高用户体验感。
14、2、本实用新型的实施例提供的机器人,机器人还包括驱动组件,驱动组件分别与控制模块及耳部组件连接。通过此设计,控制模块可以通过控制驱动组件工作以使耳部组件可相对躯干模块的外表面转动。
15、3、本实用新型的实施例提供的机器人,驱动组件包括转轴及传动结构,转轴的一端与传动结构转动连接,另一端与耳部本体连接。通过驱动组件包括转轴及传动结构的设计,该驱动组件结构简单,通过传动结构和转轴的配合下就能够实现耳部组件相对躯干组件的外表面相对转动的功能,从而使得本装置在操作控制起来更加简单。
16、4、本实用新型的实施例提供的机器人,控制模块可控制传动结构的转动角度和/或转动速度,以使耳部组件相对躯干模块的外表面转动的角度和/或频率可变。通过此设计,能够使得耳部组件的变化方式更加丰富,也即是使得机器人的耳部组件部分的整体姿态更加灵活,例如通过提高耳部组件相对躯干模块的外表面转动的频率,可以提高机器人的乐趣性,或,通过调节耳部组件相对躯干模块的外表面转动的角度,可以展现出不同的姿态,进而进一步地提高了机器人的乐趣性。
17、5、本实用新型的实施例提供的机器人,传动结构包括第一齿轮、第二齿轮及驱动件,驱动件与第一齿轮连接,第一齿轮与第二齿轮啮合连接,第二齿轮与转轴连接。通过此设计,驱动件工作带动第一齿轮转动,第一齿轮转动从而带动第二齿轮转动,从而带动转轴转动以实现耳部组件可相对躯干模块的外表面转动。本实用新型的传动结构的结构简单。
18、6、本实用新型的实施例提供的机器人,耳部组件包括两个耳部本体,两个耳部本体分设于躯干模块的相对两侧。通过此设计,能够更进一步地增加机器人的乐趣性,从而更进一步地提高用户体验感。
19、7、本实用新型的实施例提供的机器人,发光组件的数量为二,且两发光组件分设于耳部本体的相对两端。通过此设计,控制模块可以分别控制两个发光组件的不同亮灭方式和/或颜色,以进一步地提高机器人的乐趣性,从而更进一步地提高用户体验感。
20、8、本实用新型的实施例提供的机器人,头面组件包括面部和后脑部,通过此设计能够使得机器人的防生效果更佳。
21、9、本实用新型的实施例提供的机器人,机器人还包括尾巴组件,尾巴组件与躯干模块身体组件远离面部的一侧连接,且尾巴组件可相对躯干模块伸缩或折叠。通过此设计,通过改变尾巴组件的形态从而增加了机器人的乐趣性,而且使得机器人的仿生化效果更佳,从而提高了用户的体验感及玩乐乐趣。
22、10、本实用新型的实施例提供的机器人,尾巴组件由软性材料制成。通过此设计,能够使得尾巴组件能够便于伸缩或折叠,同时当用户抚摸尾巴组件时,可以提高其抚摸时的触摸感,进而进一步地提高用户体验感。
23、11、本实用新型的实施例提供的机器人,机器人还包括腿部模块,腿部模块设置于身体组件远离头面组件的一端,且身体组件可相对腿部模块转动以带动头面组件相对腿部组件转动。通过此设计,能够提高机器人的动作的丰富性及灵活性,同时使得机器人的仿生化效果更佳。
24、12、本实用新型的实施例提供的机器人,机器人还包括至少两个腿部组件,至少两个腿部组件分设于躯干模块远离耳部组件的相对两侧,躯干模块可相对腿部组件转动。通过此设计,使得机器人更易保持平衡稳定,进一步提高了机器人对于不同地形的适应能力。此外,腿部组件在分设于躯干模块的相对两侧的设计,使得躯干模块的重心可相对离地面更近,从而降低了机器人整体的重心高度,进一步提高了机器人的稳定性,使之不易倾倒,从而进一步提高了机器人对于环境的适应能力。
25、13、本实用新型的实施例提供的机器人,每一腿部组件包括轮架、驱动轮及从动轮,轮架具有相对两端,驱动轮及从动轮分别设置于轮架的相对两端,通过此设计能够使得机器人能实现两轮运动或者四轮运动以及转向以及速度调整,从而进一步提高了机器人对于环境的适应能力。
- 还没有人留言评论。精彩留言会获得点赞!