一种固废污染物智能采样手臂的制作方法
本技术涉及污染物采样装置,具体为一种固废污染物智能采样手臂。
背景技术:
1、目前在对固废污染物进行采样过程中所使用的一种固废污染物智能采样手臂,其采样手臂大多无法对采样后的污染物进行密封放置,因此在搬运时,容易造成采样污染物中的气体逸出,进而给搬运人员带来了危害,不利于对采样手臂后续的使用,且其手臂的操作方式大多采用人工进行,而人工的操作效率不佳,进而降低了对污染物的采样效果,同时还降低了手臂的智能化性能。
2、综上所述,本实用新型通过设计一种固废污染物智能采样手臂来解决上述背景技术中的问题。
技术实现思路
1、本实用新型的目的在于提供一种固废污染物智能采样手臂,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
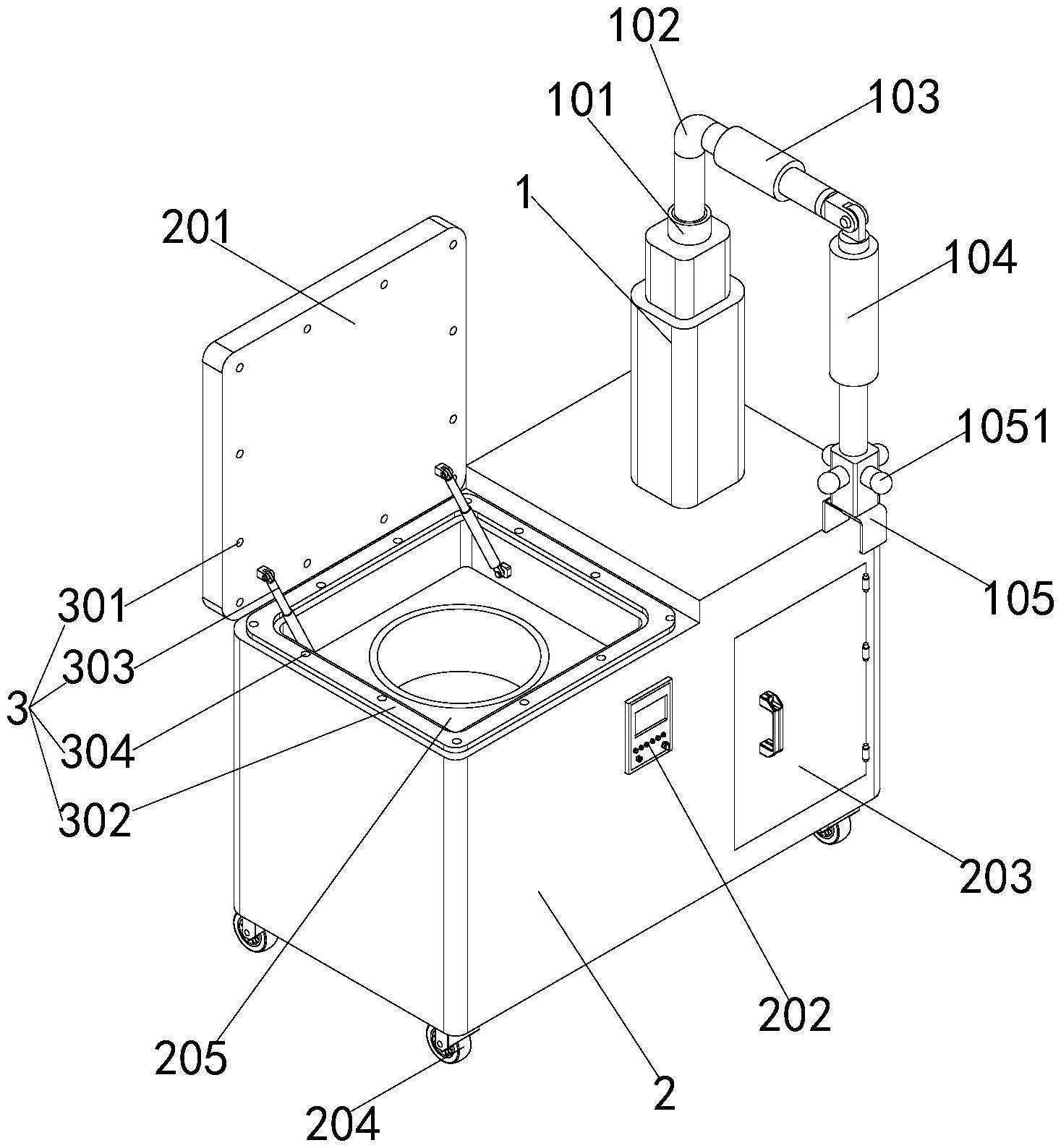
3、一种固废污染物智能采样手臂,包括手臂主体,所述手臂主体的顶部固定安装有电动旋转座,所述电动旋转座的顶部固定安装有l形支臂,所述l形支臂远离电动旋转座的一端固定设置有一号电推杆,所述一号电推杆的伸缩端通过l形连接件固定安装有二号电推杆,所述二号电推杆的伸缩端底部固定安装有电动夹臂,所述电动夹臂的外侧分别固定设置有全方位识别摄像头,所述手臂主体的底部固定安装有采样车,所述采样车的顶部通过合页转动设置有密封盖,所述密封盖与采样车之间设置有密封机构,所述采样车的后侧设置有控制器和仓门,所述采样车的底部分别固定安装有滑轮,所述采样车的内部开设有放置仓和电池仓;
4、所述密封机构包括嵌入安装在密封盖底部的一号磁块和固定粘接在采样车顶部左侧的密封垫以及分别通过转动件活动安装在放置仓内部左右两侧顶部的液压杆,所述一号磁块有多个,所述密封垫的顶部嵌入安装有二号磁块。
5、作为本实用新型优选的方案,所述放置仓的内部顶端延伸至与采样车的顶部左侧表面相平齐,且其的内部底端设置有放样皿。
6、作为本实用新型优选的方案,所述仓门位于电池仓的外侧后端,其中电池仓的内部底端设置有蓄电池。
7、作为本实用新型优选的方案,所述二号磁块的底部与采样车的顶部左侧表面固定连接,且其与一号磁块呈对应设置并磁吸连接。
8、作为本实用新型优选的方案,所述液压杆的伸缩端通过转动件与密封盖的底部表面转动连接。
9、作为本实用新型优选的方案,所述电动旋转座、一号电推杆、二号电推杆、电动夹臂、全方位识别摄像头和液压杆分别通过导线与控制器电性连接。
10、与现有技术相比,本实用新型的有益效果是:
11、1.本实用新型中,通过在固废污染物智能采样手臂中设置的密封机构,从而利用密封机构中的结构设计,实现了污染物与空气的隔绝,进而达到了对搬运人员进行安全防护的目的,避免了污染物对搬运人员所带来的危害,便于后续对采样手臂的使用。
12、2.本实用新型中,通过设置的一种固废污染物智能采样手臂,从而利用电动旋转座、一号电推杆、二号电推杆、电动夹臂和全方位识别摄像头的结构设计,实现了电动夹臂的全方位移动,进而达到了电动夹臂进行自动采样的目的,为使用人员提供了方便,提高了手臂的采样效果,同时还提高了手臂的智能化性能。
技术特征:
1.一种固废污染物智能采样手臂,包括手臂主体(1),其特征在于:所述手臂主体(1)的顶部固定安装有电动旋转座(101),所述电动旋转座(101)的顶部固定安装有l形支臂(102),所述l形支臂(102)远离电动旋转座(101)的一端固定设置有一号电推杆(103),所述一号电推杆(103)的伸缩端通过l形连接件固定安装有二号电推杆(104),所述二号电推杆(104)的伸缩端底部固定安装有电动夹臂(105),所述电动夹臂(105)的外侧分别固定设置有全方位识别摄像头(1051),所述手臂主体(1)的底部固定安装有采样车(2),所述采样车(2)的顶部通过合页转动设置有密封盖(201),所述密封盖(201)与采样车(2)之间设置有密封机构(3),所述采样车(2)的后侧设置有控制器(202)和仓门(203),所述采样车(2)的底部分别固定安装有滑轮(204),所述采样车(2)的内部开设有放置仓(205)和电池仓;
2.根据权利要求1所述的一种固废污染物智能采样手臂,其特征在于:所述放置仓(205)的内部顶端延伸至与采样车(2)的顶部左侧表面相平齐,且其的内部底端设置有放样皿。
3.根据权利要求1所述的一种固废污染物智能采样手臂,其特征在于:所述仓门(203)位于电池仓的外侧后端,其中电池仓的内部底端设置有蓄电池。
4.根据权利要求1所述的一种固废污染物智能采样手臂,其特征在于:所述二号磁块(304)的底部与采样车(2)的顶部左侧表面固定连接,且其与一号磁块(301)呈对应设置并磁吸连接。
5.根据权利要求1所述的一种固废污染物智能采样手臂,其特征在于:所述液压杆(303)的伸缩端通过转动件与密封盖(201)的底部表面转动连接。
6.根据权利要求1所述的一种固废污染物智能采样手臂,其特征在于:所述电动旋转座(101)、一号电推杆(103)、二号电推杆(104)、电动夹臂(105)、全方位识别摄像头(1051)和液压杆(303)分别通过导线与控制器(202)电性连接。
技术总结
本技术涉及污染物采样装置技术领域,具体为一种固废污染物智能采样手臂,包括手臂主体,所述手臂主体的顶部固定安装有电动旋转座,所述电动旋转座的顶部固定安装有L形支臂,所述L形支臂远离电动旋转座的一端固定设置有一号电推杆,所述一号电推杆的伸缩端通过L形连接件固定安装有二号电推杆,所述二号电推杆的伸缩端底部固定安装有电动夹臂,所述手臂主体的底部固定安装有采样车,所述采样车的顶部通过合页转动设置有密封盖,所述密封盖与采样车之间设置有密封机构,通过在固废污染物智能采样手臂中设置的密封机构,进而达到了对搬运人员进行安全防护的目的,避免了污染物对搬运人员所带来的危害,便于后续对采样手臂的使用。
技术研发人员:汪玉清,樊孝俊,陈博,段桐丹,樊雅明,胡赛,封雄
受保护的技术使用者:江西领航检测有限公司
技术研发日:20221223
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!