一种巡检运维机器人的制作方法
本技术涉及移动机器人,特别涉及一种巡检运维机器人。
背景技术:
1、随着人工智能技术及移动机器人技术等迅速发展,巡检机器人顺势而生,其可携带多种安防监控设备对工作区域内进行智能巡视,并可自主决策以及将收集的信息传递至远端的监控系统。目前的巡检机器人分为挂轨移动机器人和地面行走机器人两种,其中挂轨移动机器人普遍应用于机房等较窄工作环境下,而地面行走机器人主要应用于仓库等较空旷的工作环境中,它们在各自工作环境里都能最大发挥自身最大巡检作用,但由于许多工厂里不仅有机房,而且还有更多厂房和仓库,因此需要两种巡检机器分别在机房和厂房等进行巡检工作,这就导致巡检机器人所需的养护和充能的成本较高,同时由于两者移动结构不同,因此工作人员在检修和调试起来较为繁琐。
技术实现思路
1、本实用新型的目的是提供一种巡检运维机器人,具有依据工作环境变化,自动切换移动方式的效果。
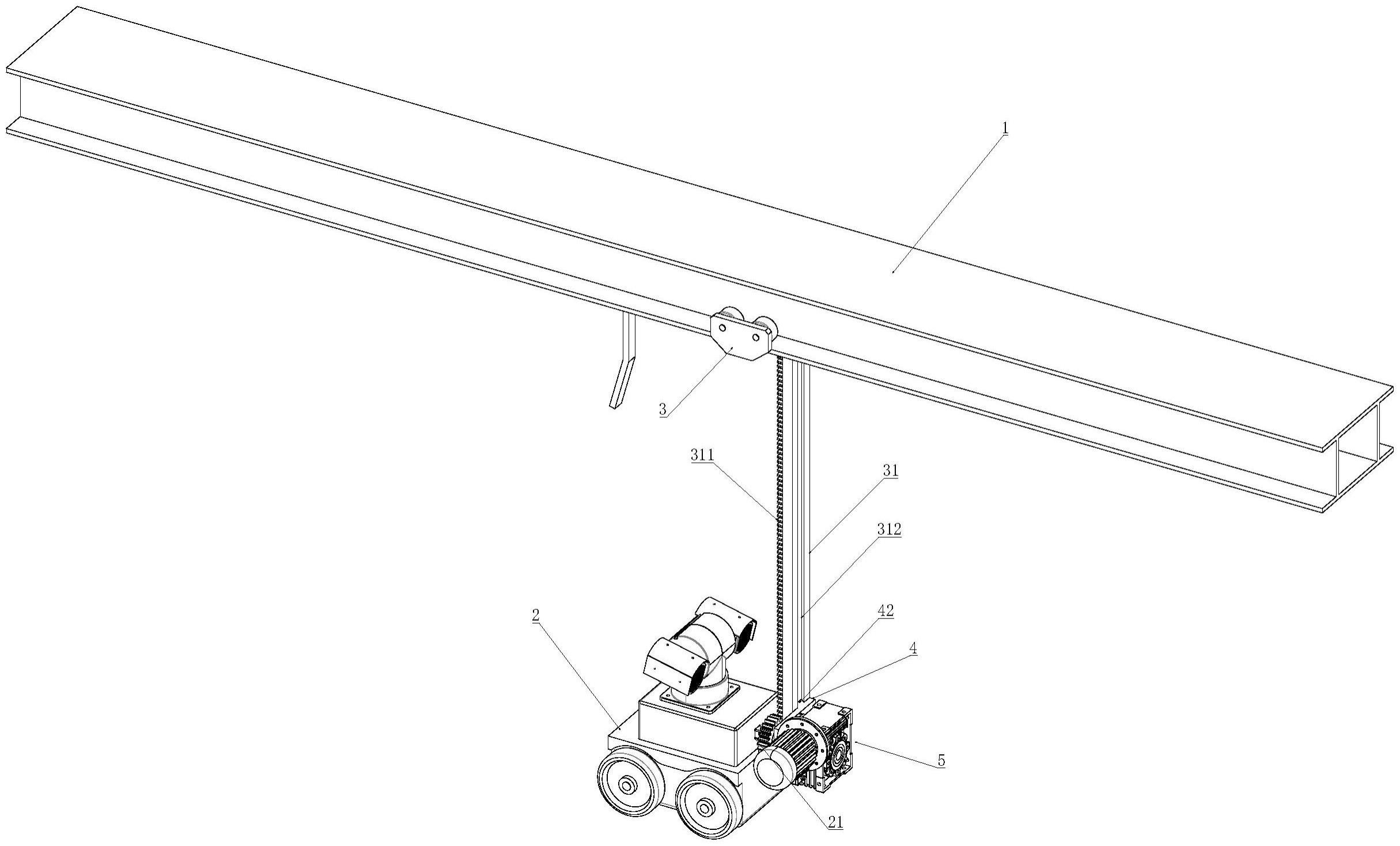
2、本实用新型的上述技术目的是通过以下技术方案得以实现的:一种巡检运维机器人,包括挂轨、移动机器人,所述挂轨上滑动连接有移动架,所述移动架上固定设有垂直于挂轨的升降板,所述升降板的一面固定设有齿条,所述升降板的另一面滑动连接有升降座,所述升降座上转动连接有转动杆,所述转动杆位于升降板的一侧且固定安装有啮合所述齿条的齿轮,所述升降座上设置有驱动所述转动杆转动的驱动装置,所述转动杆穿过齿轮固定连接有多边形柱,所述移动机器人上开设有供多边形柱插接的多边形孔。
3、通过采用上述技术方案,当移动机器人切换为挂轨移动时,移动机器人能够在地面上自动对准多边形孔和多边形柱并逐渐靠近,直至多边形柱完全插进移动机器人的多边形孔后,驱动装置就会驱动转动杆转动,使得移动机器人翻转,同时转动齿轮会在齿条上移动,使得升降座和移动机器人向上爬升,直至移动机器人在爬升和翻转了多圈半时,移动机器人底部的车轮就会正好会和挂轨的底面相接触,因此移动机器人就能在移动架的导向下,沿着挂轨移动,即切换成挂轨移动方式。当移动机器人切换为地面行走时,驱动装置驱动转动杆反转,使得移动机器人边翻转边下降,在即将到达地面时,移动机器人的车轮也会刚好落到地面上,此时移动机器人在地面快速移动,使得多边形柱退出移动机器人多边形孔。其中,移动机器人的一侧车轮在即将翻转时,会和地面或挂轨之间发生不可避免干涉,但由于车轮的橡胶材质和减震装置,且还在翻转过程中还进行着升降,因此车轮轮胎和减震装置会以一定的形变抵消干涉,同时加快升降速度,使得车轮快速的离开地面或挂轨,减小车轮和地面或挂轨的干涉程度。
4、本实用新型的进一步设置为:所述移动架上固定设有平行于升降板的固定板,且固定板的长度小于升降板,所述移动机器人位于固定板和升降板之间。
5、通过采用上述技术方案,当移动机器人翻转并升降到挂轨下方时,固定板和升降板能够固定移动机器人的两侧,从而防止移动机器人在沿着挂轨移动时,因惯性导致多边形柱退出移动机器人的多边形孔,发生掉落事故。
6、本实用新型的进一步设置为:所述固定板远离挂轨的一端固定连接有倾斜的导板,所述导板的倾斜的方向向固定板远离升降板的一侧。
7、通过采用上述技术方案,利用导板,能够在移动机器人翻转和爬升时,将其导引进固定板和升降板之间,以避免移动机器人的多边形孔和多边形柱未完全连接,导致翻转爬升的移动机器人卡在固定板下方。
8、本实用新型的进一步设置为:所述驱动装置包括固定于升降座的伺服电机、安装于伺服电机输出端的蜗轮蜗杆减速器,所述蜗轮蜗杆减速器的输出端固定连接所述转动杆。
9、通过采用上述技术方案,利用伺服电机,能够精准的控制转动杆的转动圈数,以保证移动机器人的翻转圈数和角度,而利用蜗轮蜗杆减速器传动,在能够减小伺服电机转速的同时,还能自锁固定转动杆的位置,进而将移动机器人稳定的倒挂在挂轨下方
10、本实用新型的进一步设置为:所述升降板远离齿条的一面开设有燕尾滑槽,所述升降座上固定设有嵌于燕尾滑槽且滑动的燕尾滑块。
11、通过采用上述技术方案,利用燕尾滑块和燕尾滑槽的配合,以保证升降座在升降板上的平稳升降。
12、本实用新型的有益效果是:
13、1.通过该结构,实现了巡检机器人简单的切换移动方式,以适应不同工作场景的效果,在面对较窄的机房环境,切换成挂轨移动的巡检机器人,能够检查到机房的所有角落和高处,而在面对较空旷的产房和仓库,切换成地面行走的巡检机器人,能够自主选择安全路线巡查,进而同时满足两种巡检机器人的工作任务,有效的降低了巡检机器人养护和能源成本。
14、2.通过齿轮和齿条的传动结构,同时实现了移动机器人的翻转和升降运动,从而节省移动机器人在切换过程中所需的能源。
技术特征:
1.一种巡检运维机器人,包括挂轨(1)、移动机器人(2),其特征在于,所述挂轨(1)上滑动连接有移动架(3),所述移动架(3)上固定设有垂直于挂轨(1)的升降板(31),所述升降板(31)的一面固定设有齿条(311),所述升降板(31)的另一面滑动连接有升降座(4),所述升降座(4)上转动连接有转动杆(41),所述转动杆(41)位于升降板(31)的一侧且固定安装有啮合所述齿条(311)的齿轮(411),所述升降座(4)上设置有驱动所述转动杆(41)转动的驱动装置(5),所述转动杆(41)穿过齿轮(411)固定连接有多边形柱(412),所述移动机器人(2)上开设有供多边形柱(412)插接的多边形孔(21)。
2.根据权利要求1所述的一种巡检运维机器人,其特征在于:所述移动架(3)上固定设有平行于升降板(31)的固定板(32),且固定板(32)的长度小于升降板(31),所述移动机器人(2)位于固定板(32)和升降板(31)之间。
3.根据权利要求2所述的一种巡检运维机器人,其特征在于:所述固定板(32)远离挂轨(1)的一端固定连接有倾斜的导板(321),所述导板(321)的倾斜的方向向固定板(32)远离升降板(31)的一侧。
4.根据权利要求2所述的一种巡检运维机器人,其特征在于:所述驱动装置(5)包括固定于升降座(4)的伺服电机(51)、安装于伺服电机(51)输出端的蜗轮蜗杆减速器(52),所述蜗轮蜗杆减速器(52)的输出端固定连接所述转动杆(41)。
5.根据权利要求1所述的一种巡检运维机器人,其特征在于:所述升降板(31)远离齿条(311)的一面开设有燕尾滑槽(312),所述升降座(4)上固定设有嵌于燕尾滑槽(312)且滑动的燕尾滑块(42)。
技术总结
本技术涉及移动机器人技术领域,公开了一种巡检运维机器人,包括挂轨、移动机器人,挂轨上滑动连接有移动架,移动架上固定设有垂直于挂轨升降板,升降板的一面固定设有齿条,升降板的另一面滑动连接有升降座,升降座上转动连接有转动杆,转动杆位于升降板的一侧且固定安装有啮合齿条的齿轮,升降座上设置有驱动转动杆转动的驱动装置,转动杆穿过齿轮固定连接有多边形柱,移动机器人上开设有供多边形柱插接的多边形孔。本技术具有以下优点和效果:具有依据工作环境变化,自动切换移动方式的效果。
技术研发人员:王洪荣,张启航,张湘凯,郭小刚
受保护的技术使用者:湖北贽丰机器人技术有限公司
技术研发日:20221223
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!