一种具有安全避障功能的列车巡检机器人的制作方法
本技术涉及巡检机器人,尤其涉及一种具有安全避障功能的列车巡检机器人。
背景技术:
1、随着技术的发展,以及绿色出行的提倡,乘坐铁路列车出行的人们越来越多。铁路列车具有运行速度快、运行时间长、运行区域广的特点。在列车运行的过程中,其上的零部件会逐渐磨损、腐蚀和损坏。为了减少列车运行中的安全隐患,确保列车正常运行,有必要定期对列车进行巡检。
2、现有技术中,一般是通过巡检机器人对列车的车底进行检测。这类巡检机器人普遍使用激光雷达、橡胶安全触边等方法进行安全避障。该些安全避障方法对位于巡检机器人四轴的水平方向上的障碍物有效,但对高度方向的障碍物是无效的,即如果巡检机器人在行驶过程中水平方向的定位导航有误,或者列车的车底出现预期外的物体时,则巡检机器人有可能与高度方向的障碍物发生碰撞,从而影响巡检作业。
3、因此,需要对现有技术进行改进。
4、以上信息作为背景信息给出只是为了辅助理解本公开,并没有确定或者承认任意上述内容是否可用作相对于本公开的现有技术。
技术实现思路
1、本实用新型提供一种具有安全避障功能的列车巡检机器人,以解决现有技术的不足。
2、为实现上述目的,本实用新型提供以下的技术方案:
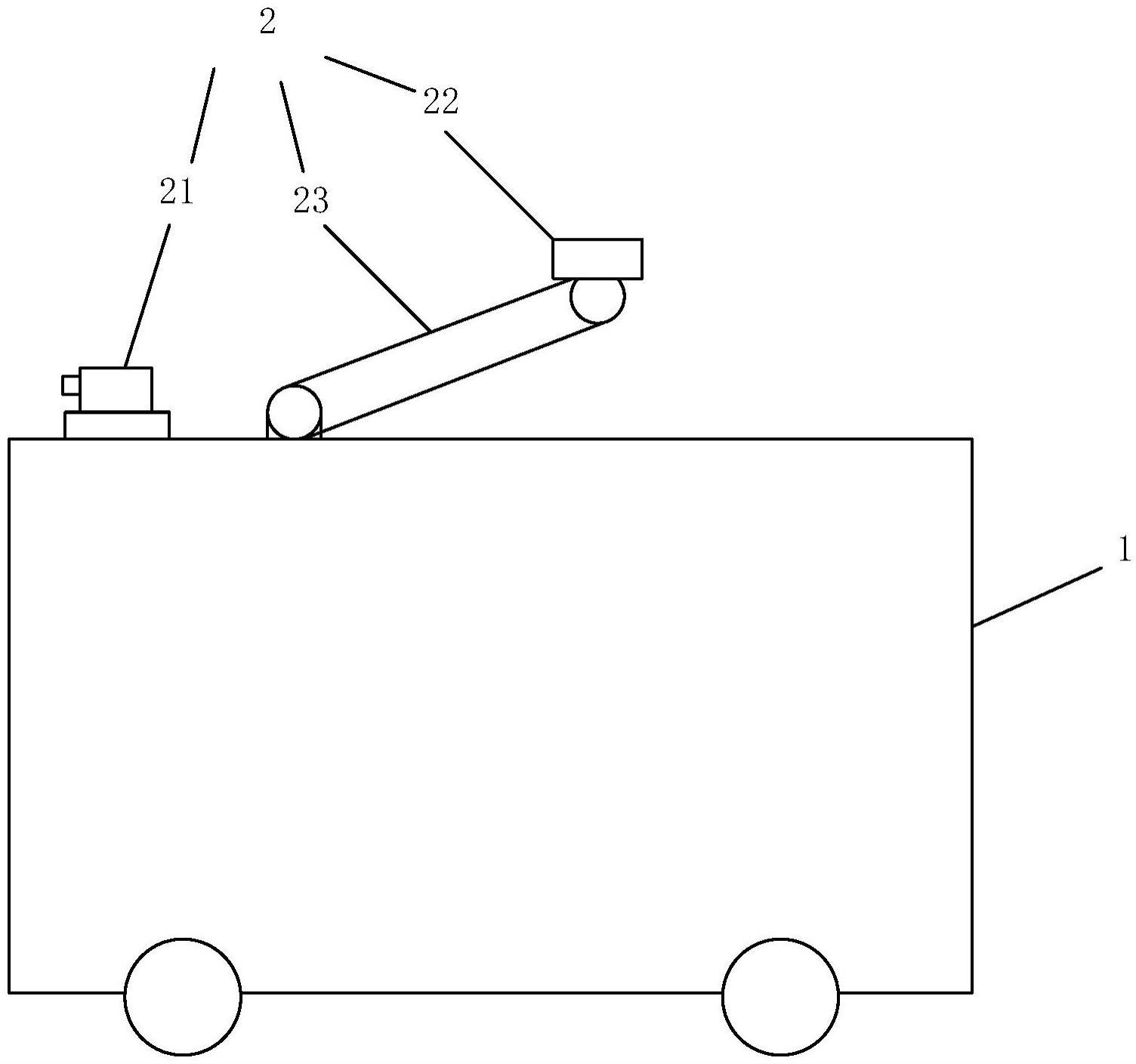
3、一种具有安全避障功能的列车巡检机器人,包括巡检机器人本体和安全避障装置;其中,
4、所述安全避障装置包括激光雷达、双目结构光相机和多自由度机械手;
5、所述激光雷达和所述多自由度机械手分别设置在所述巡检机器人本体上;所述双目结构光相机设置在所述多自由度机械手上;
6、所述激光雷达用于对周围环境进行扫描,以探测水平方向的障碍物;
7、所述双目结构光相机用于对周围环境进行拍摄,以识别竖直方向的障碍物;
8、所述多自由度机械手用于带动所述双目结构光相机进行多自由度移动。
9、进一步地,所述具有安全避障功能的列车巡检机器人中,所述巡检机器人本体包括机体、驱动模组、主控模组和巡检模组;
10、所述驱动模组设置在所述机体的底部;
11、所述主控模组和所述巡检模组分别设置在所述机体上;
12、所述安全避障装置、驱动模组和巡检模组分别与所述主控模组连接。
13、进一步地,所述具有安全避障功能的列车巡检机器人中,所述驱动模组包括差速驱动机构和万向轮;
14、所述万向轮与所述差速驱动机构连接,所述差速驱动机构与所述主控模组连接。
15、进一步地,所述具有安全避障功能的列车巡检机器人中,所述主控模组包括处理器单元和无线通信单元;
16、所述处理器单元与所述无线通信模块连接。
17、进一步地,所述具有安全避障功能的列车巡检机器人中,所述巡检模组包括导航定位单元和实时摄像单元;
18、所述导航定位单元和所述实时摄像单元分别与所述处理器单元连接。
19、进一步地,所述具有安全避障功能的列车巡检机器人中,所述巡检机器人本体还包括供电模组;
20、所述驱动模组、主控模组和巡检模组分别与所述供电模组连接。
21、进一步地,所述具有安全避障功能的列车巡检机器人中,所述巡检机器人本体还包括充电模组;
22、所述充电模组与所述供电模组连接。
23、进一步地,所述具有安全避障功能的列车巡检机器人中,所述巡检机器人本体还包括报警模组;
24、所述报警模组与所述供电模组连接,用于在检测到所述供电模组的电量耗尽时发出报警提示。
25、与现有技术相比,本实用新型具有以下有益效果:
26、本实用新型提供的一种具有安全避障功能的列车巡检机器人,通过在巡检机器人本体上设置包括激光雷达、双目结构光相机和多自由度机械手的安全避障装置,然后由激光雷达探测水平方向的障碍物,以及由双目结构光相机配合多自由度机械手识别竖直方向的障碍物,提高了列车巡检机器人的避障能力,可高效实现对列车底部的巡检作业,以保障列车的安全运行,适于大范围推广应用。
技术特征:
1.一种具有安全避障功能的列车巡检机器人,其特征在于,包括巡检机器人本体(1)和安全避障装置(2);其中,
2.根据权利要求1所述的具有安全避障功能的列车巡检机器人,其特征在于,所述巡检机器人本体(1)包括机体(11)、驱动模组(12)、主控模组(13)和巡检模组(14);
3.根据权利要求2所述的具有安全避障功能的列车巡检机器人,其特征在于,所述驱动模组(12)包括差速驱动机构(121)和万向轮(122);
4.根据权利要求3所述的具有安全避障功能的列车巡检机器人,其特征在于,所述主控模组(13)包括处理器单元(131)和无线通信单元(132);
5.根据权利要求4所述的具有安全避障功能的列车巡检机器人,其特征在于,所述巡检模组(14)包括导航定位单元(141)和实时摄像单元(142);
6.根据权利要求2所述的具有安全避障功能的列车巡检机器人,其特征在于,所述巡检机器人本体(1)还包括供电模组(15);
7.根据权利要求6所述的具有安全避障功能的列车巡检机器人,其特征在于,所述巡检机器人本体(1)还包括充电模组(16);
8.根据权利要求6所述的具有安全避障功能的列车巡检机器人,其特征在于,所述巡检机器人本体(1)还包括报警模组(17);
技术总结
本技术公开了一种具有安全避障功能的列车巡检机器人,包括巡检机器人本体和安全避障装置;安全避障装置包括激光雷达、双目结构光相机和多自由度机械手;激光雷达和多自由度机械手分别设置在巡检机器人本体上;双目结构光相机设置在多自由度机械手上;激光雷达用于对周围环境进行扫描,以探测水平方向的障碍物;双目结构光相机用于对周围环境进行拍摄,以识别竖直方向的障碍物;多自由度机械手用于带动双目结构光相机进行多自由度移动。本技术提高了列车巡检机器人的避障能力,可高效实现对列车底部的巡检作业,以保障列车的安全运行,适于大范围推广应用。
技术研发人员:徐昌源,黄海东,吴耿才,胡孝楠,朱晓东,黄永林,潘文峰,肖爱辉,尹三勇,甘宇,梁颖昌,郑杰锋,杨日清,陈润松,江文鑫,吴晓波,李炳钰,姚鹏飞,王林文
受保护的技术使用者:东莞市诺丽科技股份有限公司
技术研发日:20221230
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!