用于决定通过刮研加工应形成的凹部的位置的装置、机器人系统以及方法与流程
本公开涉及用于决定通过刮研加工而应在工件的表面形成的凹部的位置的装置、机器人系统以及方法。
背景技术:
1、已知一种进行刮研加工的机器人(例如,专利文献1)。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2004-042164号公报
技术实现思路
1、发明要解决的问题
2、有时以在工件的表面形成多个凹部的方式使机器人重复执行刮研加工。寻求更简单地构建能够执行这样的刮研加工的机器人系统。
3、用于解决问题的方案
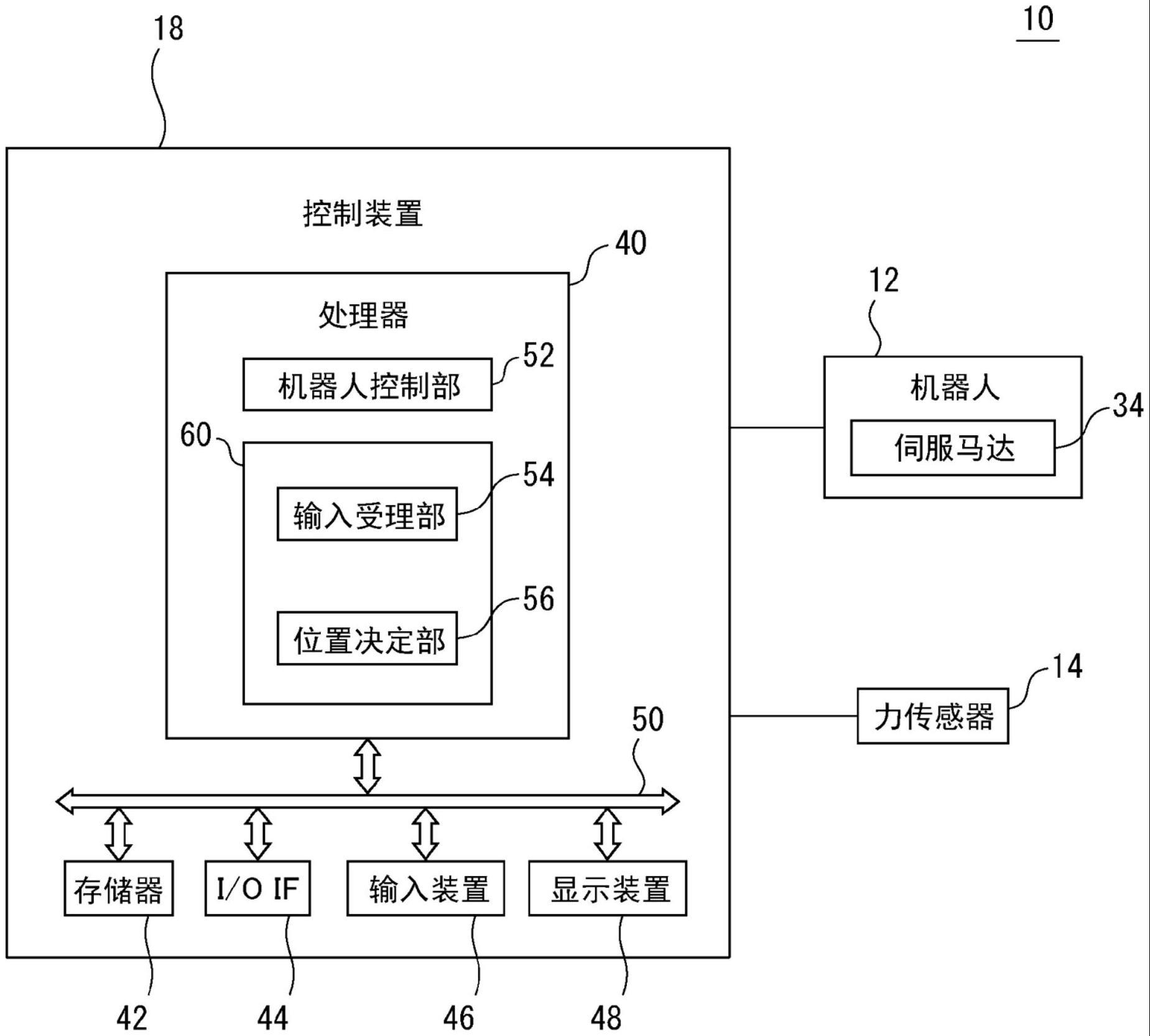
4、在本公开的一个方式中,一种装置,用于决定多个凹部的位置,所述多个凹部是通过机器人利用刮削工具对工件的表面进行刮削以使其平坦的刮研加工而应在该表面形成的凹部,所述装置具备:输入受理部,其受理表面的形状信息和该表面上的多个凹部的图案信息的输入;以及位置决定部,其基于输入受理部受理了的形状信息和图案信息,来自动地决定表面上的各个凹部的位置。
5、在本公开的另一方式中,一种方法,用于决定多个凹部的位置,所述多个凹部是通过机器人利用刮削工具对工件的表面进行刮削以使其平坦的刮研加工而应在该表面形成的凹部,在所述方法中,处理器受理表面的形状信息和该表面上的多个凹部的图案信息的输入,所述处理器基于所受理了的形状信息和图案信息来自动地决定表面上的各个凹部的位置。
6、发明的效果
7、根据本公开,能够在工件的表面上自动地决定凹部的位置,因此,能够将刮研加工用的机器人系统的启动所花费的作业简化。
技术特征:
1.一种装置,用于决定多个凹部的位置,所述多个凹部是通过机器人利用刮削工具对工件的表面进行刮削以使其平坦的刮研加工而应在该表面形成的凹部,所述装置具备:
2.根据权利要求1所述的装置,其中,
3.根据权利要求2所述的装置,其中,
4.根据权利要求1~3中的任一项所述的装置,其中,
5.根据权利要求1~4中的任一项所述的装置,其中,
6.根据权利要求1~5中的任一项所述的装置,其中,
7.根据权利要求1~6中的任一项所述的装置,其中,
8.根据权利要求7所述的装置,其中,
9.一种机器人系统,具备:
10.一种方法,用于决定多个凹部的位置,所述多个凹部是通过机器人利用刮削工具对工件的表面进行刮削以使其平坦的刮研加工而应在该表面形成的凹部,在所述方法中,
技术总结
有时使机器人重复执行刮研加工以在工件的表面形成多个凹部。寻求更简单地构建能够执行这样的刮研加工的机器人系统的技术。一种装置(60),用于决定多个凹部的位置,所述多个凹部是通过机器人(12)利用刮削工具对工件的表面进行刮削以使其平坦的刮研加工而应在该表面形成的凹部,所述装置(60)具备:输入受理部(54),其受理表面的形状信息和该表面上的多个凹部的图案信息的输入;以及位置决定部(56),其基于输入受理部(54)受理了的形状信息和图案信息,来自动地决定表面上的各个凹部的位置。
技术研发人员:铃木忠则
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!