用于容器帽的切割装置和方法与流程
本发明关于一种特定而言用于切割容器的容器帽,例如用于由塑料制作且可用于封闭容器(诸如例如瓶子)的容器帽的切割装置和方法。具体而言但非排他地,本发明关于切割一容器帽的一侧壁以制作一防破坏环或保证带,该防破坏环或保证带预期在首次打开该容器帽时断裂。
背景技术:
1、特定而言,参考如在权利要求1的前言中制作的装置。此类装置例如自专利公开案ep 3 103 603 a1中已知。
2、已知,借由使容器帽在固定刀具上滚动来在容器帽上进行圆周切割,以在容器帽的一个壁上形成界定保证带的较佳断裂线。
3、在此方面中,现有技术是可改良的。
4、特定而言,期望将容器帽馈送至刀具,使得容器帽在其与刀具接触时以适当方式相对于刀具定向,特定而言在需要沿着容器帽的壁进行切割的情况下小于360°,亦即,并非完整圆周,以在两个所要点处开始及结束对壁进行切割。
技术实现思路
1、本发明的一个目的是提供一种用于切割替代已知容器的容器的容器帽的装置及/或方法。
2、一个目的是解决现有技术的上述问题。
3、一个目的是允许对容器的容器帽进行切割,该切割适合于在容器帽上精确地制作防破坏环。
4、一个目的是促进切割「拴系」容器帽,亦即,在打开之后保持附接至容器的容器帽。
5、一个优点为提供一种构造简单且便宜的用于切割容器的容器帽的装置。
6、一个优点为允许在容器帽的壁上在该壁的设定点处精确地执行一或多次切割。
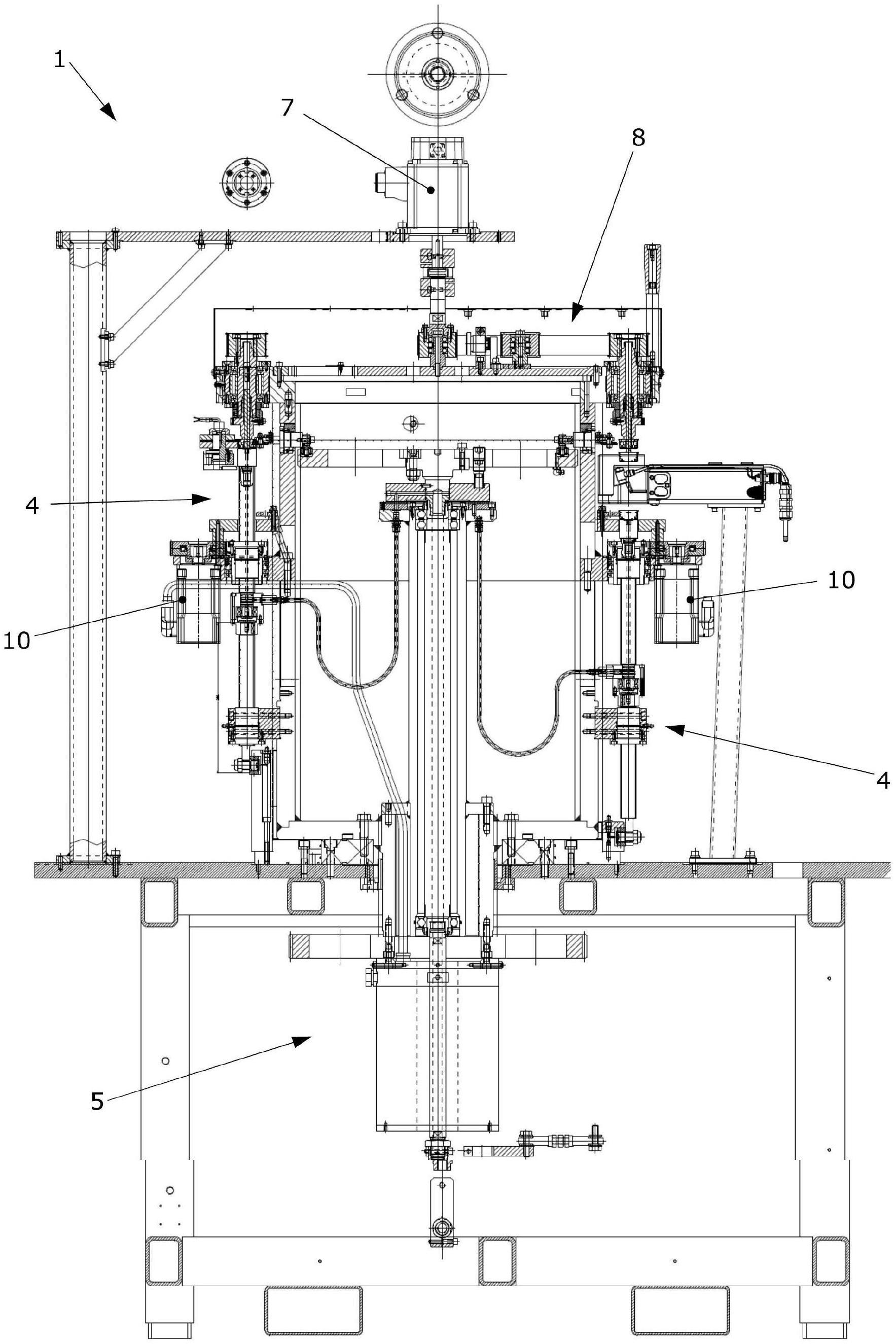
7、在一个实施方式中,一种切割装置包含:一可旋转回转料架;两个或多于两个馈送单元,其由该回转料架旋转以将所述容器帽馈送至切割构件;及传感器构件,其用于在该容器帽到达该切割构件之前侦测每一容器帽的定向,每一馈送单元包含用以承载一容器帽的一下支撑件及一上心轴,该上心轴在该容器帽在该切割构件上滚动的同时接合该容器帽,每一下支撑件易于围绕其一旋转轴旋转且经组态以接收来自马达构件的一旋转运动,以便基于该传感器构件的该侦测来使该容器帽的一定向变化。
技术特征:
1.一种切割装置(1),其包含:
2.如权利要求1的装置,其中该馈送构件包含至少一个馈送单元(4),该至少一个馈送单元可沿着配置该切割构件(3)的一路径移动,该至少一个馈送单元(4)经组态以馈送至少一个容器帽(2)且包含可围绕一心轴旋转轴旋转的一心轴(6),该心轴(6)经组态以在所述容器帽在该切割构件(3)上滚动时与所述容器帽(2)接合;该心轴(6)特定而言经组态以与所述容器帽(2)的面朝上的一内表面接合。
3.如权利要求2的装置,其包含马达构件(7),该马达构件经组态以当该心轴(6)在所述容器帽在该切割构件(3)上滚动的同时与所述容器帽(2)接合时使该心轴旋转轴旋转。
4.如权利要求3的装置,其中该馈送构件包含一回转料架(5),该回转料架可围绕一回转料架旋转轴旋转且经配置以支撑该至少一个馈送单元(4),该装置包含运动传动构件(8),该运动传动构件经组态以使得该马达构件(7)的一旋转轴的一旋转引起该心轴旋转轴的一旋转;该装置特定而言经组态以使得该回转料架旋转轴与该马达构件(7)的该旋转轴同轴或重合。
5.如权利要求4的装置,其中该运动传动构件(8)包含一或多个挠性构件及/或一或多个齿轮,该一或多个挠性构件及/或一或多个齿轮经配置以将该马达构件(7)的该旋转轴及该心轴旋转轴连接在一起。
6.如前述权利要求任一项所述的装置,其中该馈送构件包含至少一个馈送单元(4),该馈送单元经组态以馈送至少一个容器帽(2),该至少一个馈送单元(4)包含可围绕一支撑件旋转轴旋转的一支撑件(9),该支撑件(9)经组态以接合所述容器帽(2)且接收来自该致动器构件(10)的一旋转运动以在所述容器帽(2)到达该切割构件(3)之前使所述容器帽(2)相对于该支撑件旋转轴的一定向变化,以使得所述容器帽(2)以相对于该切割构件(3)的一所要定向与该切割构件相交。
7.如权利要求6的装置,其中该支撑件(9)经组态以用吸力固持构件接合所述容器帽(2);该支撑件(9)特定而言经组态以接合所述容器帽的面朝下的一外表面。
8.如权利要求6或7的装置,其中该至少一个馈送单元(4)包含可围绕一心轴旋转轴旋转的一心轴(6),该支撑件(9)能够在两个方向上相对于该心轴(6)执行一轴向运动以便接近及移动远离该心轴(6);特定而言,该支撑件(9)的该轴向运动借由凸轮构件导引;该凸轮构件特定而言包含一固定凸轮轮廓(11)及与该支撑件(9)耦接的一挺杆。
9.如权利要求1的装置,其中该馈送构件包含两个或多于两个馈送单元(4),所述馈送单元中的每一者经组态以馈送至少一个容器帽(2),该两个或多于两个馈送单元(4)可沿着一死循环路径移动且特定而言配置在一可旋转回转料架(5)上;该两个或多于两个馈送单元(4)中的每一者特定而言实现为如权利要求2至8中任一项所述的该至少一个馈送单元(4)。
10.如权利要求1的装置,其中该馈送构件包含一回转料架(5),该回转料架可围绕一回转料架旋转轴旋转,该回转料架(5)经配置以支撑两个或多于两个馈送单元(4),所述馈送单元中的每一者经组态以将至少一个容器帽(2)馈送至该切割构件(3),该两个或多于两个馈送单元(4)中的每一者包含一心轴(6),该心轴可围绕一心轴旋转轴旋转,该心轴(6)经组态以在所述容器帽在该切割构件(3)上滚动的同时与所述容器帽(2)接合,该心轴(6)经组态以与所述容器帽(2)的面朝上的一内表面接合,该致动器构件(10)对于该两个或多于两个馈送单元(4)中的每一者包含由该回转料架(5)承载的至少一个马达,该两个或多于两个馈送单元(4)中的每一者包含可围绕一支撑件旋转轴旋转的一支撑件(9),该支撑件(9)经组态以接合所述容器帽(2)及接收来自各别该马达的一旋转运动以在所述容器帽(2)到达该切割构件(3)之前使所述容器帽(2)相对于该支撑件旋转轴的一定向变化,以使得所述容器帽以相对于该切割构件(3)的一所要定向与该切割构件相交,该支撑件(9)经组态以接合所述容器帽(2)的面朝下的一外表面。
11.如权利要求10的装置,其包含运动传动构件(8),该运动传动构件经组态以使得在所述容器帽(2)在该切割构件(3)上滚动的同时,马达构件(7)的一旋转轴的一旋转引起该心轴旋转轴的一旋转,该支撑件(9)经组态以使得在所述容器帽(2)在该切割构件(3)上滚动的同时,该支撑件旋转轴系固定的或可以一空转方式旋转。
12.如权利要求10的装置,其中该两个或多于两个馈送单元(4)中的每一者经组态以使得在所述容器帽(2)在该切割构件(3)上滚动的同时,各别该马达驱动该支撑件旋转支撑轴,而该心轴旋转轴可以一空转方式旋转。
13.如前述权利要求任一项的装置,其中该传感器构件(13)包含光学构件,例如一相机,及/或其中该致动器构件(10)包含至少一个马达,该至少一个马达与所述容器帽(2)一起由该馈送构件沿着一路径驱动,及/或其中该控制构件包含可程序化电子构件及在该可程序化电子构件上实施的计算机指令。
14.一种特定而言由前述权利要求中任一项的切割装置(1)实施的切割方法,该方法包含以下步骤:
15.一种特定而言如权利要求14的切割方法,该切割方法包含以下步骤:
16.如权利要求15的方法,其包含将该支撑件(9)的至少一部分与该致动器构件(10)解耦的步骤。
17.如权利要求16的方法,其中该将该支撑件(9)与该致动器构件(10)解耦的步骤在该容器帽(2)接合在该支撑件(9)与该心轴(6)之间之后发生。
18.如权利要求16或17的方法,其中该将该支撑件(9)与该致动器构件(10)解耦的步骤在该容器帽(2)与该切割构件(3)滚动接触之前发生。
19.如权利要求15至18中任一项的方法,其包含借由传感器构件(13)读取该容器帽(2)的一角位置的一初始步骤及处理来自该传感器构件(13)的一信号以判定该容器帽(2)适合于在开始一切割操作的时刻获得相对于该切割构件(3)的一所要定向的一所要旋转的一后续步骤。
20.如权利要求15至19中任一项的方法,其包含在该支撑件(9)与该心轴(6)之间相互接近的一步骤,其中在相互接近的该步骤期间,该容器帽(2)由该支撑件(9)承载,该支撑件校正该容器帽(2)相对于一参考定向的一角定向以获得相对于该切割构件(3)的一所要定向。
21.如权利要求20的方法,其中当该容器帽(2)与该心轴(6)接触时终止该校正,借此该心轴将该容器帽(2)输送至该切割构件(3)而无需执行进一步的定向校正动作。
22.如权利要求15至21中任一项的方法,其中该致动器构件(10)重复地执行一操作循环,在借由传感器构件(13)读取一容器帽(2)的一角位置的一初步步骤之后,该操作循环包括:该支撑件(9)的角加速度的至少一初始步骤,在此期间该致动器构件(10)将一旋转运动传动至该支撑件(9)以使该支撑件(9)以该心轴(6)的相同角速度旋转;处于恒定角速度的至少一中间步骤,在此期间该致动器构件(10)自该支撑件(9)释放,以使得该致动器构件(10)不再将一旋转运动传动至该支撑件(9)且该容器帽(2)借由该心轴(6)旋转;以及至少一最终减速度阶段。
23.如权利要求22的方法,其包含校正该容器帽(2)相对于一参考定向的一角定向以获得相对于该切割构件(3)的一所要定向的一步骤,该校正步骤在该加速度阶段期间执行。
24.一种特定而言如权利要求1至13中任一项及/或用于实施如权利要求14至23中任一项方法的切割装置,该装置包含:用于馈送容器帽(2)的馈送构件及用于在由该馈送构件馈送的每一容器帽(2)上制作一保证带的切割构件(3),其中该馈送构件包含至少一个馈送单元(4),该至少一个馈送单元可沿着配置该切割构件(3)的一路径移动,该至少一个馈送单元(4)经组态以馈送至少一个容器帽(2)且包含可围绕一支撑件旋转轴旋转的一支撑件(9)及可围绕一心轴旋转轴旋转的一心轴(6),该支撑件(9)及该心轴(6)经组态以使得该容器帽(2)首先与该支撑件(9)接合且随后接合在该支撑件(9)与该心轴(6)之间,该心轴经组态以在该容器帽在该切割构件(3)上旋转的同时接合该容器帽(2),其中该装置包含:用于使该支撑件(9)围绕该支撑件旋转轴旋转的致动器构件(10)、与用于使该心轴(6)围绕该心轴旋转轴旋转的该致动器构件(10)不同的马达构件(7),以及控制构件,该控制构件经组态以致动该致动器构件(10)及该马达构件(7),以使得当该容器帽(2)接合在该支撑件(9)与该心轴(6)之间时,该支撑件(9)围绕该支撑件旋转轴的旋转速度等于该心轴(6)围绕该心轴旋转轴的旋转速度。
25.如权利要求24的装置,其包含解耦构件(23;25),该解耦构件经组态以将该支撑件(9)的一第一部分(24)与该支撑件(9)的一第二部分(26)解耦,该第二部分(26)承载该容器帽(2)且该第一部分(24)连接至该致动器构件(10),以中断自该致动器构件(10)至该第二部分(26)的运动传动,特定而言在该容器帽(2)接合在该支撑件(9)与该心轴(6)之间之后后及/或在该容器帽(2)与该切割构件(3)滚动接触之前。
26.如权利要求25的装置,其中该解耦构件包含至少一个栓槽联轴器(23)。
27.如权利要求25或26的装置,其中该解耦构件包含至少一个具有磁体(25)的器件。
28.如权利要求24至27中任一项的装置,其中该控制构件经组态以基于对该传感器构件(13)的一侦测来控制该致动器构件(10)以使每一容器帽(2)的定向变化,以使得该容器帽(2)以相对于该切割构件(3)的一所要定向到达该切割构件(3)。
29.如权利要求24至28中任一项的装置,其中该馈送构件包含一回转料架(5),该回转料架可围绕一回转料架旋转轴旋转且经配置以支撑该至少一个馈送单元(4),该马达构件(7)经组态以使该回转料架(5)围绕该回转料架旋转轴旋转,该装置包含具有一或多个齿轮(22)的运动传动构件(8),该一或多个齿轮经组态以将该回转料架旋转轴与该心轴旋转轴连接。
30.如权利要求24至29中任一项的装置,其中该支撑件(9)经组态以用吸力固持构件接合该容器帽(2);该支撑件(9)特定而言经组态以接合该容器帽的面朝下的一外表面。
技术总结
本发明揭示一种用于在一容器帽上形成界定一保证带的一较佳切割线的切割装置及方法,其中一回转料架围绕一垂直旋转轴旋转且承载所述多个馈送单元,每一馈送单元经组态以将一各别容器帽馈送至一刀具,其中一光学传感器在所述容器帽到达该刀具之前侦测所述容器帽的一定向,其中每一馈送单元包含一可旋转下支撑件及一可旋转上心轴,其中每一下支撑件可借由凸轮构件进行轴向控制移动且借由一各别马达旋转,该各别马达能够在该容器帽到达该刀具之前基于该光学传感器的该侦测来使该容器帽的一定向变化,且其中每一上心轴在该容器帽在该刀具上滚动的同时接合该容器帽。
技术研发人员:法利希欧·维拉,里卡多·兰佐尼,毛里齐奥·斯卡拉纳罗
受保护的技术使用者:沙克米机械商业合作艾莫勒精简公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!