用于控制手持式工具机的方法与流程
本发明涉及一种根据权利要求1所述的、用于控制手持式工具机的方法。
背景技术:
1、从de 10 2011 056 269 a1已知用于借助于开着的钳式工具机械式地拧紧螺栓连接的一种方法和一种设备。
技术实现思路
1、本发明说明了一种用于控制手持式工具机、尤其是关断式螺钉机的方法,该手持式工具机包括驱动马达和控制单元,该方法包括以下的方法步骤:
2、-借助于控制单元设定用于控制所述驱动马达的运行级,其中,该运行级包括驱动马达的转动方向、驱动马达的转速和关断标准,
3、-设定驱动马达的转速的转速常数,
4、-根据所设定的运行级和/或所设定的转速常数运行驱动马达,
5、-在达到关断标准时对驱动马达进行制动。
6、现有技术的缺点在于,已知的手持式工具机、尤其是关断式螺钉机只能以最大的马达转速运行。本发明解决了这个问题。
7、本发明提供一种用于控制手持式工具机的方法,用该方法可以设定转速常数,从而可以提高螺栓连接的质量。
8、手持式工具机可以构造为电动式地或者气动式地运行的手持式工具机。在此,电动式地运行的手持式工具机可以构造为电网运行的手持式工具机或者构造为蓄电池运行的手持式工具机。例如,手持式工具机可以构造为螺钉机、压缩空气螺钉机、钻式螺钉机、转动冲击式螺钉机、压缩空气转动冲击式螺钉机、冲击钻式螺钉机或者关断式螺钉机。关断式螺钉机从de 10341 974a1已知并且被使用在工业中,主要使用在汽车工业中,以产生具有预确定的拧紧转矩的螺栓连接。例如,这样的关断式螺钉机也在de 44 30186a1中被公开,因此,这里不对此更详尽地探讨。
9、手持式工具机包括具有驱动马达和具有至少一个传动装置的驱动单元。驱动马达可以构造为电动机。传动装置可以构造为行星齿轮传动装置,其中,例如它可以是可切换的。本发明也可以使用在其他的马达类型或者传动装置类型中。附加地,手持式工具机包括能量供给装置,其中,能量供给装置设置用于借助于蓄电池、尤其是手持式工具机蓄电池组进行蓄电池运行和/或设置用于电网运行。在一种优选的实施方式中,能量供给装置构造用于蓄电池运行。在本发明的框架下,“手持式工具机蓄电池组”应理解为至少一个蓄电池单元和蓄电池组壳体的合并。手持式工具机蓄电池组以有利的方式构造用于对市售的蓄电池运行的手持式工具机进行能量供给。至少一个蓄电池单元可以例如构造为具有3.6v的标称电压的锂离子蓄电池单元。示例性地,手持式工具机蓄电池组可以包括多达十个蓄电池单元,其中,也可设想其他数量的蓄电池单元。作为蓄电池运行的手持式工具机的实施方式和作为电网运行的手持式工具机的运行是本领域技术人员充分已知的,因此,这里不对能量供给装置的细节进行更详细的探讨。
10、驱动装置构型为使得它可通过手动开关操纵。如果由使用者操纵手动开关,则驱动单元接通并且手持式工具机被投入运行。如果相应地手动开关不被使用者进一步操纵,则驱动单元被关断。优选地,驱动单元可这样电子式地被控制和/或调节,使得可以实现逆向运行。也可设想,手动开关涉及可搭入式的手动开关,所述手动开关可在至少一种操纵状态下搭入到至少一个位置中。尤其是,手动开关构造为使得一旦使用者操纵手动开关,则实施该方法。
11、手持式工具机可以具有冲击机构。冲击机构在运行期间产生高的转矩峰值,以便因此松开卡住的连接器件或者紧固连接器件。冲击机构可以借助于传动装置与驱动马达连接。冲击机构可以例如构造为旋转式冲击机构、卡锁式冲击机构、转动式冲击机构或者锤式冲击机构。附加地,冲击机构可以与从动轴连接。
12、在从动轴的自由端部上、尤其是在从驱动单元离开地指向的方向上的自由端部上构造有工具接收部。工具接收部可以构造为工具内接收部和/或构造为工具外接收部。例如,工具内接收部可以构造为用于与插入式工具连接的多边形内接收部。多边形内接收部可以例如构造为内六边形接收部,从而插入式工具可以示例性地以螺钉机批头形式被接收。例如,工具外接收部可以构造为用于与插入式工具连接的多边形外接收部。多边形外接收部可以例如构造为外四边形接收部,从而插入式工具可以示例性地以螺钉套筒头形式被接收。这类的螺钉机批头和这类的螺钉套筒头从现有技术中充分已知,从而这里省去详细的说明。
13、手持式工具机、尤其是驱动单元可以具有耦合器。耦合器构造用于,一旦可调节的转矩作用在工具接收部上,则将工具接收部与传动装置和/或与驱动马达分开。耦合器可以布置在工具接收部和冲击机构之间、工具接收部和传动装置之间或者冲击机构和传动装置之间。耦合器可以例如构造为关断式耦合器、锁止耦合器或者转矩耦合器。
14、手持式工具机具有至少一条工具轴线。工具轴线可以例如构造为从动轴或者工具接收部的旋转轴线。尤其是,“轴向”应理解为基本上平行于工具轴线。而“径向”应理解为基本上垂直于工具轴线。
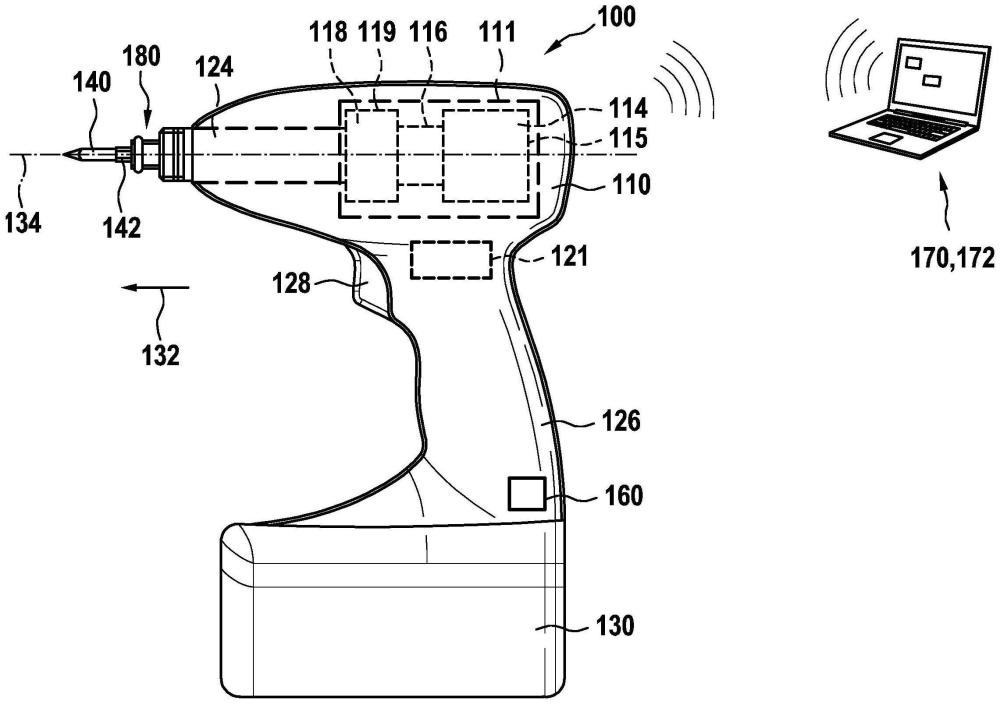
15、手持式工具机的控制单元构造用于,控制和/或调节驱动单元、尤其是驱动马达。尤其是,控制单元构造为使得一旦使用者操纵手动开关,则实施该方法。
16、用于驱动马达的控制的运行级包括驱动马达的转动方向、驱动马达的转速和关断标准。在使用控制单元的情况下设定运行级。驱动马达的转动方向可以是例如松开转动方向(例如在具有右旋螺纹的紧固元件的情况下是左转动方向,或者在具有左旋螺纹的紧固元件的情况下是右转动方向)或者是拧紧转动方向(例如在具有右旋螺纹的紧固元件的情况下是右转动方向或者在具有左旋螺纹的紧固元件的情况下是左转动方向)。常见的紧固元件可以是例如螺钉、自攻螺钉、螺母或者自锁的螺母。转动方向可以针对运行级设定,从而对于多个运行级可以针对每个单个的运行级设定转动方向。在此,驱动马达的转速可以是驱动马达的输出轴的转速。驱动马达的转速可以针对运行级设定,从而对于多个运行级,转速可以分别单独地设定。关断标准由控制单元设定。在此,关断标准包括下述标准:在所述标准中,手持式工具机、尤其是关断式螺钉机关断。可以为运行级设定关断标准,从而对于多个运行级,可以为每个单个的运行级分别设定独立的关断标准。可能的关断标准可以是例如,达到驱动马达、尤其是输出轴的绕圈的数量、从动轴的绕圈的数量、工具接收部的绕圈的数量、驱动马达(尤其是输出轴)的转动角、从动轴的转动角、工具接收部的转动角、手持式工具机蓄电池组的电池电压落入可规定的值以下、到达从动轴和/或工具接收部上的关断转矩、外部信号(例如来自锁止离合器的外部信号)、过去的持续时间、手持式工具机(尤其是关断式螺钉机)发生的错误状态和/或产生的加速度(例如0g、1g的多倍或者高的、重复的角加速度)。
17、控制单元构造用于,设定驱动马达的转速的转速常数。在此,转速常数是驱动马达的转速的特性。此外,控制单元构造用于,根据所设定的运行级和/或所设定的转速常数来运行驱动马达。一旦使用者操纵手动开关,驱动马达会以所设定的运行级和/或所设定的转速常数运行。此外,一旦使用者操纵手动开关,则可以实施多数的运行级。
18、控制单元构造用于,一旦达到关断标准,则对驱动马达进行制动。在达到关断标准时,即使使用者继续在手动开关上保持压紧,驱动马达也被制动。典型地,当使用者放开手动开关并且重新操纵它时,才会重复该方法。控制单元可以例如借助于短路制动器和/或反向电流制动器实现驱动马达的制动。在短路制动器的情况下,将电场施加在驱动马达上,以便迫使驱动马达制动。在反向电流制动器的情况下,向驱动马达的相反的转动方向施加电场,以便对驱动马达进行制动。可设想,在制动之前关断驱动马达。一旦驱动马达被关断,则该驱动马达无电流并且可以减速停止,从而驱动马达还可以执行至少部分绕圈。例如,可以通过驱动马达的关断与短路制动器和/或反向电流制动器的组合来实现驱动马达的快速制动。
19、用于控制手持式工具机、尤其是关断式螺钉机的方法可以借助于程序、尤其是计算机程序或者在外部的计算单元(例如计算机、服务器、智能手机或者诸如此类的)上的应用程序来设定。在此,在程序中可以设定运行级和转速常数。附加地,该程序可以设定多个运行级。该程序使得能够为每个运行级设定驱动马达的转动方向、驱动马达的转速和关断标准。进一步地,该程序使得能够为每个操作级设定转速常数。接着,可以将所设定的用于控制手持式工具机、尤其是关断式螺钉机的方法有线地和/或无线地从程序传送给手持式工具机、尤其是关断式螺钉机。手持式工具机、尤其是关断式螺钉机可以接收用于控制的方法并且将其传输给控制单元。用于控制的方法的有线地传送可以例如借助于usb线缆从外部的计算单元传输给手持式工具机、尤其是关断式螺钉机。为此,外部的计算单元和手持式工具机、尤其是关断式螺钉机具有至少一个usb接口。用于控制的方法的无线地传送可以例如借助于例如蓝牙连接、wlan连接和/或nfc连接这样的无线电连接在外部的计算单元和手持式工具机、尤其是关断式螺钉机之间进行。
20、在该方法的一种实施方式中,当转速常数被激活时,转速是基本上恒定的转速。可以借助于程序为每个运行级设定转速常数。基本恒定的转速可以位于2400 1/min至240001/min的范围内。从动转速可以视传动比而定地改变。在此,可以在没有作用在工具接收部上的负载的情况下确保转速常数。在此,转速常数可以具有在所设定的转速附近10%的范围内的转速波动。
21、在该方法的一种实施方式中,当转速常数被停用时,转速是最大转速。在此,最大转速是驱动马达的最大转速。在此,最大转速取决于手持式工具机蓄电池组的当前电池电压。因此,存在着最大可用的转速对当前电池电压的依赖关系。在电池电压下降的情况下,最大转速会下降。最大转速可以位于9000 1/min至30000 1/min、尤其是10000 1/min至27000 1/min的范围内。最大从动转速可以取决于传动比。可以为每个运行级单独地设定最大转速。
22、在一种实施方式中,该方法包括在使用控制单元的情况下检测驱动马达的当前转速和将当前转速与所述转速进行比较。控制单元构造用于,检测驱动马达的当前转速。为此,手持式工具机、尤其是关断式螺钉机可以具有霍尔传感器,所述霍尔传感器构造用于,求取驱动马达的当前转速。进一步地,控制单元构造用于,将当前转速与尤其所设定的转速进行比较。在此,控制单元将当前转速与尤其所设定的转速进行比较。在此,控制单元可以在1ms左右的时间范围内将当前转速与所述转速进行比较。
23、在该方法的一种实施方式中,当比较产生当前转速与所述转速的偏差时,在使用控制单元的情况下调节当前转速。控制单元构造用于,在存在着偏差时调节当前转速,使得检测尤其是所设定的转速。在此,如果当前转速在尤其所设定的转速以下,则控制单元可以向上调节当前转速。此外,如果当前转速在尤其所设定的转速以上,则控制单元可以向下调节当前转速。例如,如果偏差大于所设定的转速的10%,则控制单元可以调节当前转速。在此,控制单元可以调节当前转速,直至偏差小于等于尤其所设定的转速的10%为止。
24、在一种实施方式中,所述方法包括下述方法步骤:
25、-通过使用控制单元从外部的通信设备接收运行级。
26、接收运行级的方法步骤可以是上游的方法步骤,从而可以在设定运行级的方法步骤之前执行运行级的接收。运行级可以由外部的通信设备(例如外部的计算单元)有线地和/或无线地接收。例如可以足够的是,运行级的接收基本上一次地执行并且控制单元存储方法步骤。那么由此可以实现,仅仅当从使用者方面想要其他的运行级时,手持式工具机、尤其是关断式螺钉机才接收另外的运行级。有线地和/或无线地接收可以如以上所说明地进行。
27、在一种实施方式中,该方法包括以下方法步骤:
28、-在达到关断标准时,传送拧接信息。
29、在驱动马达被制动之前或者在驱动马达被制动之后,可以执行拧接信息的传送的方法步骤。在此,拧接信息可以包括下述信息:拧接是正常还是不正常。手持式工具机、尤其是关断式螺钉机可以包括用于输出拧接信息的输出单元。因此,输出单元可以例如声学地、视觉地和/或触觉地输出拧接信息。输出单元可以例如构造为hmi。因此可设想,通过绿色的led亮起来显示出正常的拧接。进一步地可设想,通过红色的led亮起来与声学的报警信号来输出不正常的拧接。
30、在一种实施方式中,所述方法包括以下的方法步骤:
31、-在使用控制单元的情况下求取手持式工具机的手持式工具机蓄电池组的电池电压。
32、在手持式工具机、尤其是关断式螺钉机运行期间,手持式工具机蓄电池组与手持式工具机、尤其是关断式螺钉机连接,从而手持式工具机蓄电池组以电能供给手持式工具机。控制单元构造用于,求取在手持式工具机运行期间的电池电压。在此,控制单元能够在所述方法期间多次地求取电池电压。然后,可以使用所述电池电压作为附加的用于执行所述方法的参数。最大转速取决于电池电压。电池电压越低,所述最大转速越低。
33、在一种实施方式中,该方法包括将电池电压与电池电压极限值进行比较,并且,当电池电压落入电池电压极限值以下时,发送拧接数量。控制单元构造用于,当电池电压落入电池电压极限值以下时,将所求取的电池电压与电池电压极限值进行比较。电池电压极限值可以例如在外部的计算单元上的程序中设定或者在工厂方面预先给定。控制单元附加地构造用于,根据电池电压与电池电压极限值的比较来求取剩余的拧接数量。然后,控制单元可以例如在使用输出单元的情况下将剩余的拧接数量作为拧接数量传送给使用者。因此,输出单元可以例如显示,在手持式工具机、尤其是关断式螺钉机关断之前还能够有十次有效的拧接。然而,当电池电压落在电池电压极限值以下时,也能够是其他次数的有效的拧接。
34、在一种实施方式中,所述方法包括将电池电压与电池电压下极限值进行比较,直到电池电压落到电池电压下极限值以下作为关断标准。控制单元构造用于,将电池电压与电池电压下极限值进行比较。电池电压下极限值可以在使用程序的情况下或者在工厂方面设定。如果控制单元求取到,电池电压落到电池电压极限值以下,则控制单元可以将关断、尤其是制动确立为关断标准。此外,控制单元构造用于,当控制单元求取到:进一步的拧接不能成功地完成时,则控制单元阻止进一步的拧接。
35、在所述方法的一种实施方式中,运行级包括穿入级,其中,在穿入级中,在松开转动方向上执行绕圈的至少一小部分。所述绕圈的小部分可以是例如几度的绕圈、四分之一绕圈、半绕圈、四分之三绕圈或者整绕圈。在此,绕圈的小部分可以由驱动马达、尤其是输出轴、传动装置、输出轴和/或工具接收部执行。也可以设想,在松开转动方向上执行超过所述绕圈的小部分。如以上所说明地,可以将左转动方向或者右转动方向设置为松开转动方向。可以在使用程序的情况下设定穿入级,从而可以为穿入级设定置穿入转速、松开转动方向和穿入关断标准。可以为穿入级设定转速常数。
36、在所述方法的一种实施方式中,运行级包括快速旋入级,其中,在快速旋入级中,在拧紧方向上以快速旋入级转速执行快速旋入级数的绕圈。可以借助于程序设定快速旋入级。快速旋入级可以在穿入级之后。快速旋入级包括快速旋入级转速、拧紧方向和作为关断标准的快速旋入级数的绕圈。在此,快速旋入级数取决于紧固元件的长度和/或螺距的数量。在快速旋入级转速的情况下,可以激活转速常数或者设定最大转速。如以上所说明地,拧紧转动方向可以是右转动方向或者左转动方向。可设想,将快速旋入级作为可选的方法步骤执行。
37、在所述方法的一种实施方式中,运行级包括关断级,其中,在关断级中,在拧紧方向上执行关断级转速,直到达到关断力矩作为关断标准。可以借助于程序来设定关断级。关断级可以在穿入级和/或快速旋入级之后。关断级包括关断级转速、拧紧方向和关断力矩作为关断标准。可以为关断级转速设定转速常数或者最大转速。在此,关断级转速可以取决于应用情况并且可以例如在50 1/min至3000 1/min的范围内。在此,关断级转速可以作用在从动轴和/或工具接收部上。关断力矩可以例如通过锁止耦合器的至少一次锁止来规定。为了识别出锁止耦合器的锁止,这里参看de 10 2016 220 001 a1和de 10 2012 204 172a1。一旦控制单元发现锁止离合器的一次的锁止,则对驱动马达进行制动。如以上所说明地,拧紧转动方向可以是右转动方向或者左转动方向。
38、在所述方法的一种实施方式中,运行级包括松开级,其中,在松开级中,在松开转动方向上执行松开级数的绕圈。可以借助于程序设定松开级。松开级可以在关断级之后。松开级可以用于,防止紧固元件收缩和/或实现例如车辆门这样的紧固载体的定向。松开级包括松开级转速、松开转动方向和作为关断标准的松开级数的绕圈。如以上所说明地,松开转动方向可以是左转动方向或者右转动方向。松开级转速的绕圈可以是例如紧固元件、工具接收部或者从动轴的一小部分绕圈、半绕圈、整个绕圈或者多于一个绕圈。在松开级转速的情况下,可以设定转速常数或者最大转速。可设想,将松开级作为可选的方法步骤来执行。
39、一旦在使用程序的情况下设定了穿入级、快速旋入级、关断级和/或松开级,则这些级可以作为运行级从程序传递到手持式工具机上。
40、本发明也涉及一种控制单元,所述控制单元配置为使得执行以上所说明的方法。控制单元可以构造为至少一个微处理器和/或构造为至少一个微控制器。
41、本发明也说明一种手持式工具机、尤其是关断式螺钉机,其具有以上所说明的驱动马达和具有以上所说明的控制单元,所述控制单元配置为,使得其实施以上所说明的方法。
- 还没有人留言评论。精彩留言会获得点赞!