指令值生成装置、方法、以及程序与流程
本公开涉及指令值生成装置、指令值生成方法、以及指令值生成程序。
背景技术:
1、以往,在利用机器人进行组装、取放这样的作业中,在作业的对象物能够采取各种状态等情况下,机器人可能会作业失败。因此,进行了构成反馈控制系统,该反馈控制系统将各种传感器所获取的数据反馈于机器人的控制。
2、提出了如下所述的技术:例如,通过手动诱导能够控制外力的机械臂的动作,对此时的机器人的位置及作用的外力进行记录,输出机械臂的动作的指令值,以再现所记录的信息(非专利文献1)。
3、此外,提出了如下所述的技术:例如,通过对声音、图像等传感器数据、以及从机器人的动作所获取的数据进行深度学习来生成多通道整合后的模型,从该模型输出机器人的动作的指令值(非专利文献2)。
4、现有技术文献
5、非专利文献
6、非专利文献1:“institute of robotics and mechatronics-sara”,[online],[2021年6月18日检索],因特网<url:https://www.dlr.de/rm/en/desktopdefault.aspx/tabid-11709/#gallery/29681>
7、非专利文献2:kuniaki noda,“multimodal integration for robot systemsusing deep learning”,waseda university doctoral dissertation,2015年7月
技术实现思路
1、发明要解决的技术问题
2、为了构成反馈控制系统,需要用户自行定义并安装传感器特征量以及基于该传感器特征量生成针对机器人的指令值的生成法。此外,即便是该定义正确,在根据传感器特征量对机器人的指令值的增益调整不恰当的情况下,任务不成功,也难以判断定义、安装、以及调整中的哪些存在问题。
3、此外,在非专利文献1记载的技术中,正在执行的力控制系统将人进行了手动辅助示教时的位置和力的日志记录数据直接作为力控制系统的指令值输入,因此,鲁棒性低。
4、此外,在非专利文献2记载的技术中,未使用力觉传感器,无法鲁棒地执行组装、取放这样的应用。
5、本公开是鉴于上述的点而做出的发明,其目的在于构成用于使机器人鲁棒地执行针对能够采取各种状态的对象物的作业的反馈控制系统。
6、用于解决技术问题的方案
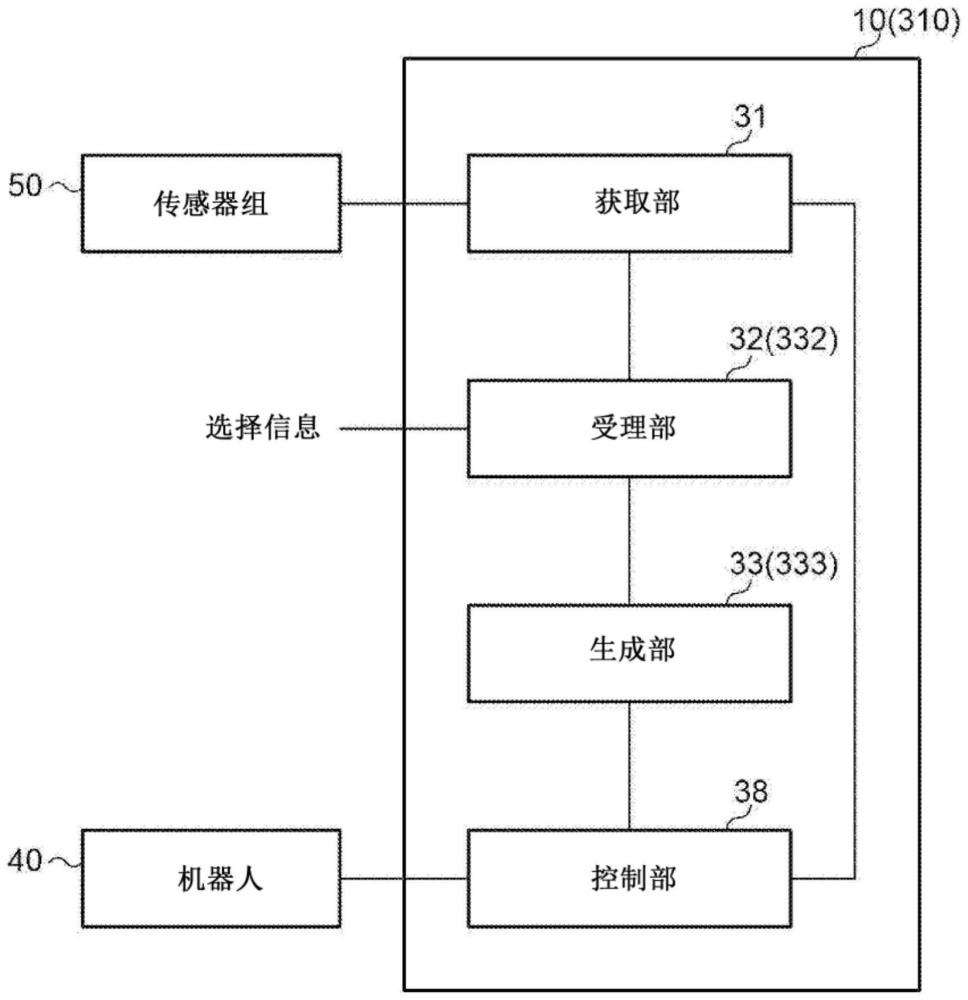
7、为了达成上述目的,本公开所涉及的指令值生成装置构成为包括:获取部,获取用于使机器人执行针对对象物的作业的指令值、以及多个种类的状态数据,多个种类的所述状态数据是表示通过手动示教了所述作业时的所述机器人的动作时的所述机器人的状态的状态数据,并且至少包括表示所述机器人的动作的动作数据、表示所述机器人与所述对象物的相对位置及相对姿态的位姿数据、以及表示在所述作业之间所述对象物受到的外力的外力数据;以及生成部,基于由所述获取部在对应的时间获取的所述指令值和所述状态数据,生成用于使所述机器人执行与所输入的所述状态数据对应的动作的指令值。由此,能够构成用于使机器人鲁棒地执行针对能够采取各种状态的对象物的作业的反馈控制系统。
8、此外,也可以是:所述生成部通过基于优化来确定所述生成器内的参数,从而生成所述生成器。由此,能够进一步提高鲁棒性。
9、此外,也可以是:本公开所涉及的指令值生成装置包括:受理部,受理关于多次示教的每次示教由所述获取部获取的所述状态数据中的、用于所述生成器的生成的所述状态数据的部分的选择,其中,所述生成部利用所选择的所述状态数据的部分来生成所述生成器。由此,能够排除不适合于生成器的生成的状态数据的部分。
10、此外,也可以是:所述受理部受理由所述获取部获取的多个种类的所述状态数据中的、用于所述生成器的生成的所述状态数据的种类的选择,所述生成部通过基于所选择的种类的所述状态数据和所述指令值,对用于生成可以再现由所选择的种类的所述状态数据表示的状态的指令值的参数进行优化,从而生成所述生成器。由此,能够生成用于生成满意度高的指令值的生成器。
11、此外,也可以是:所述生成部受理生成的所述生成器的参数的修正。由此,能够事先修正明显不恰当的参数、不符合用户的意图的参数等。
12、此外,也可以是:所述生成器的参数包括所述指令值的上限值、以及相对于所述指令值的动作的目标值,所述生成部通过将所述上限值及所述目标值固定为所指定的值,并且对其它参数进行优化,从而生成所述生成器。由此,能够生成能够输出用于实现用户更加期望的机器人的动作的指令值的生成器。
13、此外,也可以是:本公开所涉及的指令值生成装置构成为包括:指示部,基于在向由所述生成部生成的所述生成器输入对所述作业中存在偏差的可能性的参数加入了扰动项后的所述状态数据的情况下生成的指令值,判定所述机器人是否能够进行动作,在无法动作的情况下,指示所述获取部获取在加入了所述扰动项的情况下生成的指令值及所述状态数据。由此,能够通过手动的示教,自动地判定是否已获取生成器的生成所需的充分的状态数据。
14、此外,也可以是:所述生成部进行用于所述生成器的生成的所述状态数据的一部分的删除、以及由所述获取部新获取的所述状态数据的追加中的至少一方,并再次执行所述生成器的生成。由此,在基于所生成的指令值执行非意图的动作的情况下,能够通过重新进行生成器的生成,提高基于反馈控制系统的动作的质量。
15、此外,也可以是:所述获取部在所述示教时获取对包括所述对象物的作业区域进行拍摄而得到的图像,构成为包括设定部,所述设定部基于所述获取部所获取到的所述图像,设定用于识别所述作业区域的参数。由此,能够和生成器的生成一起进行识别用的参数的设定。
16、此外,也可以是:所述获取部获取基于预先设定的所述对象物的尺寸、以及从所述图像识别到的所述对象物的图像上的尺寸计算出的、对所述图像进行拍摄的照相机与所述对象物的距离。由此,能够在不使用特殊的传感器的情况下,精度优良地获取与对象物之间的距离。
17、此外,也可以是:所述机器人的动作的手动的示教是通过直接示教、来自控制器的远程操作、或使用了通过双向控制与所述机器人连接的示教用设备的远程操作来执行的。
18、此外,也可以是:本公开所涉及的指令值生成装置构成为包括:控制部,输出由所述生成器生成的指令值并对所述机器人进行控制。
19、此外,也可以是:本公开所涉及的指令值生成装置构成为包括:感测部,通过将所述生成器所生成的指令值输入所述生成器并进行逆运算,来估计所述状态数据,对所估计的所述状态数据与由所述获取部获取的所述状态数据进行比较,感测在所述机器人的作业中产生的异常。
20、此外,本公开所涉及的指令值生成方法是如下所述的方法:获取部获取用于使机器人执行针对对象物的作业的指令值、以及多个种类的状态数据,多个种类的所述状态数据是表示通过手动示教了所述作业时的所述机器人的动作时的所述机器人的状态的状态数据,并且至少包括表示所述机器人的动作的动作数据、表示所述机器人与所述对象物的相对位置及相对姿态的位姿数据、以及表示在所述作业之间所述对象物受到的外力的外力数据,生成部基于由所述获取部在对应的时间获取的所述指令值和所述状态数据,生成用于使所述机器人执行与所输入的所述状态数据对应的动作的指令值。
21、此外,本公开所涉及的指令值生成程序是使计算机作为获取部以及生成部而发挥功能的程序,其中,获取部获取用于使机器人执行针对对象物的作业的指令值、以及多个种类的状态数据,多个种类的所述状态数据是表示通过手动示教了所述作业时的所述机器人的动作时的所述机器人的状态的状态数据,并且至少包括表示所述机器人的动作的动作数据、表示所述机器人与所述对象物的相对位置及相对姿态的位姿数据、以及表示在所述作业之间所述对象物受到的外力的外力数据;生成部基于由所述获取部在对应的时间获取的所述指令值和所述状态数据,生成用于使所述机器人执行与所输入的所述状态数据对应的动作的指令值。
22、发明的效果
23、根据本公开所涉及的指令值生成装置、方法、以及程序,能够构成用于使机器人鲁棒地执行针对能够采取各种状态的对象物的作业的反馈控制系统。
- 还没有人留言评论。精彩留言会获得点赞!