一种新型的搬运助力外骨骼的制作方法
本发明属于外骨骼,尤其涉及一种新型的搬运助力外骨骼。
背景技术:
1、专利cn113370191a提出了一种物资搬运外骨骼助力机器人,从上到下包括背架机构、第一储能机构、腰部机构、第二储能机构和腿部机构;所述背架机构前端连接手部机构,后端连接所述第一储能机构,所述第一储能机构下端连接所述腰部机构;所述腰部机构通过所述第二储能机构连接所述腿部机构;穿戴者在弯腰俯身物资搬运过程中,所述第一储能机构随弯腰而变形储能,同时,所述手部机构拉动所述背架机构,所述背架机构牵动所述腰部机构,进而所述腰部机构将拉力传导到所述第二储能机构;随着穿戴者起身,第一和第二储能机构释放弹性势能,给穿戴者腰部和手臂提供助力;穿戴者在物资转运过程中,重量通过手部机构传递到穿戴者身上各处,减轻手臂的负担;腿部机构固定在穿戴者腰部两侧,对髋关节提供助力。
2、上述搬运助力外骨骼存在下肢助力结构位置影响人体运动、装置对人体带来额外扭矩的问题;而对于外骨骼上肢部分,助力结构的储能部分集中在背部,无法针对某一自由度进行助力,且手部机构和背架机构之间没有针对不同自由度的限位,容易造成危险。
3、专利cn113183120a提出了一种生物耦合式髋关节助力外骨骼,用于助力大腿的电机设置于腰部后侧,造成的负担小;且采用多级伸缩结构,满足人体运动时大腿末端偏移的需求,但只对下肢进行了助力,没有涉及上肢部分的设计。
技术实现思路
1、本发明的目的是克服现有技术中的不足,提供一种新型的搬运助力外骨骼。
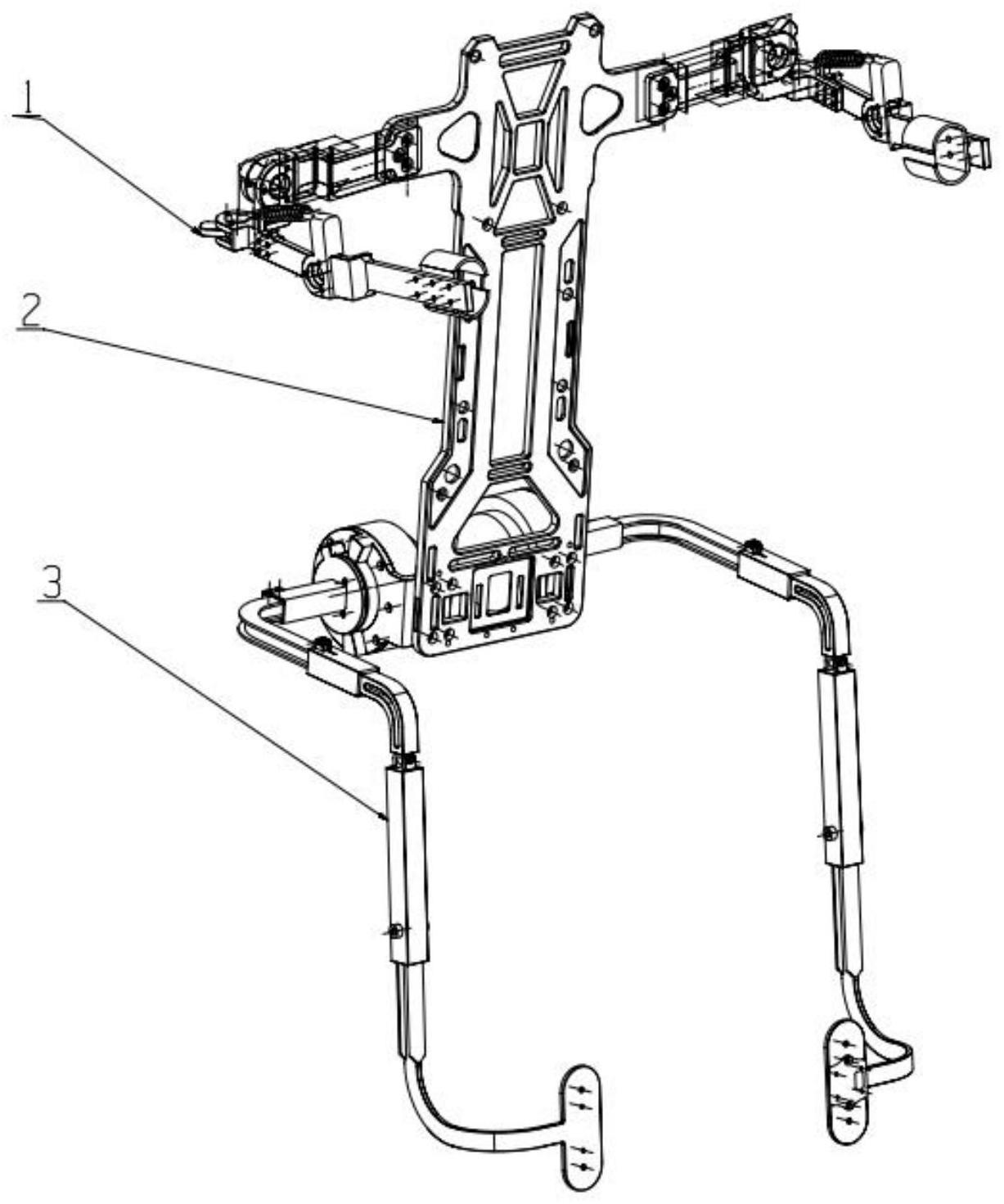
2、这种新型的搬运助力外骨骼,包括上肢部分、背架和下肢部分;
3、上肢部分包括第一肩部连接件、第二肩部连接件、上肢助力弹簧、第一大臂连接件和第三大臂连接件;第一肩部连接件一端固定连接背架,另一端通过轴承连接第二肩部连接件;第二肩部连接件通过轴承连接第一大臂连接件;第一大臂连接件固定连接有第二大臂连接件,第二大臂连接件另一端通过轴承连接第三大臂连接件;所述轴承内均设有限位装置;
4、第三大臂连接件靠近第二大臂连接件的一端设有凸起,凸起顶端朝向第二大臂连接件一侧连接上肢助力弹簧,上肢助力弹簧的另一端连接第二大臂连接件;
5、下肢部分包括下肢助力电机、第一大腿伸缩杆和第二大腿伸缩杆;下肢助力电机通过电机支座设于背架后方的腰部高度,下肢助力电机的输出端依次连接有电机连接件和髋关节连杆,髋关节连杆远离下肢助力电机一端通过铰链连接第一大腿伸缩杆的顶端,第一大腿伸缩杆内滑动套接有第二大腿伸缩杆;背架背部和第二大腿伸缩杆下端均设有imu传感器。
6、作为优选:第一肩部连接件通过轴承连接形成肩关节的第一个自由度;第二肩部连接件通过轴承连接第一大臂连接件形成肩关节的第二个自由度;第二大臂连接件通过轴承连接第三大臂连接件形成肩关节的第三个自由度;
7、所述肩关节的第一个自由度、肩关节的第二个自由度和肩关节的第三个自由度均为转动自由度,且三个自由度的转动轴相互垂直;其中肩关节的第三个自由度为大臂前后摆动的自由度。
8、作为优选:髋关节连杆包括第一髋关节连杆和第二髋关节连杆,电机连接件的方向水平,电机连接件垂直连接第一髋关节连杆,第一髋关节连杆垂直连接第二髋关节连杆,第二髋关节连杆的末端朝向垂直向下;第二髋关节连杆通过铰链连接第一大腿伸缩杆,形成第一大腿伸缩杆向大腿内侧或外侧摆动的自由度。
9、作为优选:电机连接件和第一髋关节连杆上均设有长度调节装置。
10、作为优选:第二大腿伸缩杆设有滑槽,滑槽内设有螺栓,螺栓两端固定连接第一大腿伸缩杆。
11、作为优选:下肢助力电机中设有控制模块,背架背部和第二大腿伸缩杆下端的imu传感器均通过电信号连接下肢助力电机内的控制模块。
12、作为优选:第三大臂连接件上设有大臂绑缚,第二大腿伸缩杆下端设有大腿绑缚。
13、本发明的有益效果是:
14、1)上肢部分为了配合人体运动范围,通过轴承连接结构设置了三个自由度,其中随大臂前后摆动的动作转动连接的第二大臂连接件和第三大臂连接件之间设有上肢助力弹簧,上肢助力弹簧仅对大臂向上抬起的运动进行助力,从而可以更有针对性地对抬起搬运工作进行助力;上肢助力弹簧的刚度可以更换,可以做到针对不同的负载使用不同刚度的上肢助力弹簧。
15、2)对三个自由度的轴承均增加了转动角度的限位,从而可以在运动中保护人体。
16、3)下肢部分通过电机直驱的方式给下肢助力,帮助人体完成蹲起、行走等动作,并且将电机布置在背架后方的腰部高度,减少电机自身重量所带来的对人体的扭矩。
17、4)将大腿部分设计为伸缩套管,从而应对由于电机布置在人体后方,造成在人体蹲起过程中大腿绑缚的末端产生一定位移的情况,相比下肢部分长度固定的外骨骼,本发明可以更好地跟随人体运动。
18、5)在背架背部和第二大腿伸缩杆下端均设有imu传感器,imu传感器的信息传递至下肢助力电机中,下肢助力电机可通过控制模块得到髋关节的运动角度,根据运动状态对下肢助力电机的出力进行实施调整。
技术特征:
1.一种新型的搬运助力外骨骼,其特征在于,包括:上肢部分(1)、背架(2)和下肢部分(3);
2.根据权利要求1所述的新型的搬运助力外骨骼,其特征在于:第一肩部连接件(101)通过轴承连接(102)形成肩关节的第一个自由度;第二肩部连接件(102)通过轴承连接第一大臂连接件(104)形成肩关节的第二个自由度;第二大臂连接件(105)通过轴承连接第三大臂连接件(106)形成肩关节的第三个自由度;
3.根据权利要求1所述的新型的搬运助力外骨骼,其特征在于:髋关节连杆包括第一髋关节连杆(304)和第二髋关节连杆(305),电机连接件(303)的方向水平,电机连接件(303)垂直连接第一髋关节连杆(304),第一髋关节连杆(304)垂直连接第二髋关节连杆(305),第二髋关节连杆(305)的末端朝向垂直向下;第二髋关节连杆(305)通过铰链连接第一大腿伸缩杆(306),形成第一大腿伸缩杆(306)向大腿内侧或外侧摆动的自由度。
4.根据权利要求3所述的新型的搬运助力外骨骼,其特征在于:电机连接件(303)和第一髋关节连杆(304)上均设有长度调节装置。
5.根据权利要求1所述的新型的搬运助力外骨骼,其特征在于:第二大腿伸缩杆(307)设有滑槽,滑槽内设有螺栓,螺栓两端固定连接第一大腿伸缩杆(306)。
6.根据权利要求1所述的新型的搬运助力外骨骼,其特征在于:下肢助力电机(301)中设有控制模块,背架(2)背部和第二大腿伸缩杆(307)下端的imu传感器(308)均通过电信号连接下肢助力电机(301)内的控制模块。
7.根据权利要求1所述的新型的搬运助力外骨骼,其特征在于:第三大臂连接件(106)上设有大臂绑缚(107),第二大腿伸缩杆(307)下端设有大腿绑缚。
技术总结
本发明涉及一种新型的搬运助力外骨骼,包括上肢部分、背架和下肢部分;上肢部分包括第一肩部连接件、第二肩部连接件、上肢助力弹簧、第一大臂连接件和第三大臂连接件;第一肩部连接件一端固定连接背架,另一端通过轴承连接第二肩部连接件;第二肩部连接件通过轴承连接第一大臂连接件;第一大臂连接件固定连接有第二大臂连接件,第二大臂连接件另一端通过轴承连接第三大臂连接件。本发明的有益效果是:通过轴承连接结构设置了三个自由度,其中随大臂前后摆动的动作转动连接的第二大臂连接件和第三大臂连接件之间设有上肢助力弹簧,上肢助力弹簧仅对大臂向上抬起的运动进行助力,从而可以更有针对性地对抬起搬运工作进行助力。
技术研发人员:何龙,毛喜旺,龙亿,董为
受保护的技术使用者:杭州智元研究院有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!