一种提升机器人手臂操作精度的控制方法及系统
:本发明属于信息科学技术与机器人领域,具体涉及一种提升机器人手臂操作精度的控制方法及系统。
背景技术
0、
背景技术:
1、机器人现已被广泛应用于各行各业。然而,现实世界中仍存在大量任务无法解决。这些任务难以通过编程制定具体的解决方案,要求机器人拥有一定的自适应能力,例如物体抓取与轨迹预测等。为了执行这样的任务,研究具有常识与先验知识的智能机器人成为了新的热点,如据美国国家科学基金会(nsf)公告,美国“国家机器人计划2.0”(nri-2.0)将推进通用协作机器人(co-robots)的研究,重点提高机器人如何在不确定的真实世界环境中感知、规划、行动和学习能力;波士顿动力公司研制的altlas人型机器人已经能够通过较为复杂的地形,并做出跳跃、舞蹈等高难度动作;而我国国家自然科学基金会也在近日发布2022年共融机器人重大研究计划,提出将大力发展能够与作业环境、人和其他机器人自然交互,自主适应复杂动态环境并协同作业的机器人。目前,智能机器人已经逐步走出研究院,进入大型工厂与普罗大众的日常生活中。工业机械臂由于环境单一,变化程度小,现已得到成熟广泛的应用;在快递站中,经常可以看到分拣机器人的身影。
2、在机器人的研究工作中,机器人手臂控制是机器人研究中的一项难点,其核心问题之一是如何控制其手臂末端执行器的运动,如控制末端执行器精确到达工作空间中某一位置,这一过程被称为机器人手臂的趋近控制(reaching),后文简称为机器人手臂控制或机械臂控制。趋近控制能力是机器人进一步执行其他控制操作(如抓取、推动、放置等)的基础。通过精准测量机器人的机械参数,如关节间连杆长度、相对旋转关系等,可以构建出精准的机器人运动学模型。该模型在数学上的表现形式为各个关节间位姿变换矩阵的链乘,是一个非线性的方程组。通过该方程组,给定机器人手臂各个关节角度,便可计算出机器人手臂末端位置与姿态,该模型即为正向运动学模型,亦可称为正向模型。与之相对的,机器人手臂的逆运动学模型则是输入为机器人手臂末端位置,输出为机器人手臂各个关节角度,也可称为反向模型。本发明将目标位置输入反向模型,并将反向模型输出的关节角度送入执行器中,从而实现对机器人手臂的控制。
3、传统方法主要是基于依赖于高精度的正向运动学模型来得到反向模型,即给定机器人末端执行器位置与姿态,计算出想要到达该目标位姿所需的各个关节角度。通常有两类方法用于解决逆运动学问题,一类是基于解析的方法,另一类是基于迭代算法求解。解析的方法往往仅适用于低自由度的机器人,不具备普适性,在本发明所研究的六自由度机器人手臂上无法使用。基于迭代算法求解的方法则使用迭代搜索或雅克比积分的方式求解近似解,每次规划均需要长时间的迭代。且由于传统方法均依赖于高精度的正向模型,因此依照传统方法所构建的反向模型精度上限既是正向模型的精度。因此若希望反向模型精度能更高,则使用传统方法显然并非好的解决方案。
技术实现思路
0、
技术实现要素:
1、为解决上述问题,本发明的目的是提出一种提升机器人手臂操作精度的控制方法及系统。现有方法在机器人手臂构型发生变化时,如手臂长度、使用工具变化等,原有的模型性能往往会急剧下降,需要重新构建控制模型。本发明提出的方法可以在机器人手臂构型发生改变后,通过在线学习快速适应自身及环境的变化,提升机器人手臂操作精度。
2、为实现上述目的,本发明提供了如下技术方案:
3、一种提升机器人手臂操作精度的控制方法,包括以下步骤:
4、1)采用正向模型根据机器人的关节角度计算出机器人手臂执行器的末端位置,生成关节角度与末端位置一一映射的数据;
5、2)由多层感知机网络或径向基网络构建全局反向模型,用于根据输入的末端位置来反向预测各个关节角度;利用正向模型生成的数据训练该全局反向模型,得到训练好的全局反向模型;
6、3)由多层感知机网络构建基于相对位置的局部反向模型,用于根据输入的目标位置与末端位置之间的相对位置,来预测末端位置达到目标位置所需进行的角度变换量;
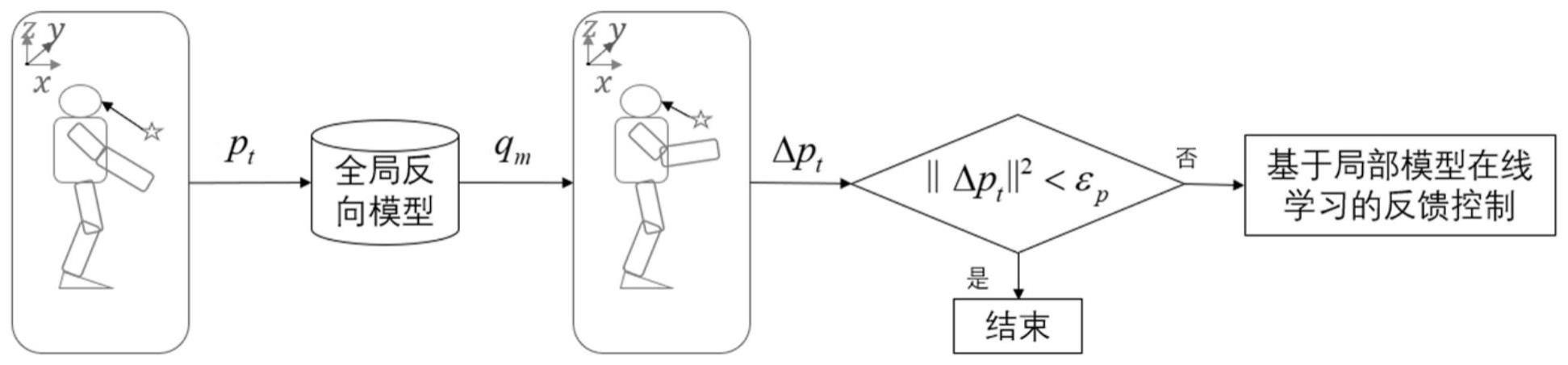
7、4)给定目标位置,利用训练好的全局反向模型计算目标关节角度,使实体机器人执行该角度;实体机器人获取当前手臂执行器末端位置和各关节角度,并计算目标位置与当前末端位置之间的相对位置;
8、5)若实体机器人计算出的相对位置大于某一个阈值,则在当前位置使用正向模型生成数据,利用该数据通过在线学习算法训练局部反向模型,优化相对位置与角度变换量之间的关系,进而调整实体机器人的关节角度,直至所述相对位置小于所述阈值或达到最大规划次数。
9、优选地,所述正向模型为用denavit-hartenberg参数法建立,使用关节-连杆形式刻画机器人,由位姿态变换矩阵计算各个关节间的位姿变换;通过各个关节间位姿变换矩阵的链乘,计算出机器人手臂末端位置与姿态。
10、优选地,所述多层感知机网络采用一种前馈神经网络,使用一个非线性的激活函数对网络层的输出进行非线性的处理;使用误差反向传播的方法调整各个节点间的权重。
11、优选地,所述误差反向传播的方法为:调整所述多层感知机网络内部神经元之间的连接权重,使与所需输出和实际输出之间的差异相关的损失函数最小化;通过小批量随机梯度下降法进行学习,对损失函数进行优化,对神经网络内部的参数进行微调。
12、优选地,所述全局反向模型的多层感知机网络的损失函数为实际关节角度与预测关节角度之间的均方误差函数。
13、优选地,所述局部反向模型的多层感知机网络的损失函数为实际角度变换量与预测角度变换量之间的均方误差函数。
14、优选地,所述径向基网络为使用径向基函数作为隐藏层中采用的激活函数的一种前馈神经网络,采用高斯核函数进行构建;通过对损失函数进行优化,对该径向基网络内部的参数进行微调。
15、优选地,所述径向基网络训练时的损失函数为实际关节角度与预测关节角度之间的均方误差函数。
16、一种提升机器人手臂操作精度的控制系统,用于实现上述方法,包括:
17、正向模型单元,包括一正向模型,用于根据机器人的关节角度计算出机器人手臂执行器的末端位置,生成关节角度与末端位置一一映射的数据,并使用所述数据训练全局反向模型单元和局部反向模型单元;
18、全局反向模型单元,包括由多层感知机网络或径向基网络构建的全局反向模型,用于根据输入的末端位置来反向预测各个关节角度;并控制实体机器人执行关节角度,使其手臂执行器末端位置到达目标位置附近;
19、局部反向模型单元,包括由多层感知机网络构建的基于相对位置的局部反向模型,用于根据输入的目标位置与末端位置之间的相对位置,来预测末端位置达到目标位置所需进行的角度变换量;并控制实体机器人调整关节角度,直至其末端位置到达目标位置。
20、本发明提出的技术方案取得技术效果如下:
21、由于基于学习的方法可以从数据流中提取信息从而估计获得对应的模型,该模型适用于复杂场景,适合处理各类复杂的映射关系。使用该类模型进行机器人反向模型的求解,不需要长时间的迭代,也不依赖于正向模型的精度,因此,本发明使用基于学习的方法,利用正向模型生成的数据构建机器人手臂的反向模型。
22、在使用前馈神经网络构建反向模型的方法中,多层感知机与径向基网络两类方法较为常见。基于多层感知机的网络具有很强的鲁棒性和容错性,可以充分逼近任意复杂的非线性关系,精度较高。基于径向基函数的神经网络的主要思想是通过非线性变换将线性不可分的样本映射到高维。由于径向基函数受到特定点(中心向量)的影响,因此,相应权重的更改将对靠近中心的那些点产生更大的影响,收敛相对较快。本发明同时用两种网络构建全局反向模型,在对精度要求较高时使用多层感知机,在对实时性要求更高时使用径向基网络。
23、智能机器人大多处于动态的环境当中。当自身构型发生变化,或其所处环境发生变化时,已经训练好的全局反向模型精度可能大大降低。同时,在用正向模型生成训练数据时,将不可避免地引入一定误差,因此在该数据上训练得到的全局反向模型必然存在误差。为此,本发明通过在线学习以适应自身与环境的变化,训练基于相对位置的局部反向模型以缓解误差和逆运动学多解性带来的负面影响,进而提高机器人手臂控制的精度。
- 还没有人留言评论。精彩留言会获得点赞!