面向二自由度肢体关节的力位感知装置及机器人
本发明涉及医疗器械,特别涉及一种面向二自由度肢体关节的力位感知装置及机器人。
背景技术:
1、脑卒中,人们通常称作中风,发病急,严重者表现为偏瘫、失语、昏迷甚至死亡。我国第三次国民死因调查结果表明,脑卒中已经升为中国第一位死因。近二十年监测结果显示,脑卒中年死亡人数逾200万,年增长速率达8.7%。脑卒中除了高致死率外,还具有高致残率和高复发率的特点,严重威胁国民生命和生活质量。据全国心血管专业委员会的调查,全国存活的脑卒中患者有3/4患有不同程度的残疾,这些正值盛年的残疾人给家庭和社会带来了巨大的经济负担和社会问题。康复治疗是目前改善脑卒中发病后肢体运动障碍的主要方法之一。因此,将机器人技术运用于康复领域,研制一种满足康复需要的康复训练机器人以提高康复训练效率和效果,具有重大的应用价值和实际的紧迫性。
2、授权号为“cn 113893137 b”的发明公开了一种面向二自由度肢体关节的力位感知装置及机器人,在该文件中仅仅设置第一卡扣组件和第二卡扣组件,通过手动的方式来对人体关节进行固定;在使用训练装置时,可能由于卡扣组件过紧或过松导致的训练效果不佳等情况。
技术实现思路
1、本发明提供一种面向二自由度肢体关节的力位感知装置及机器人,用以解决上述背景技术中提出的问题。
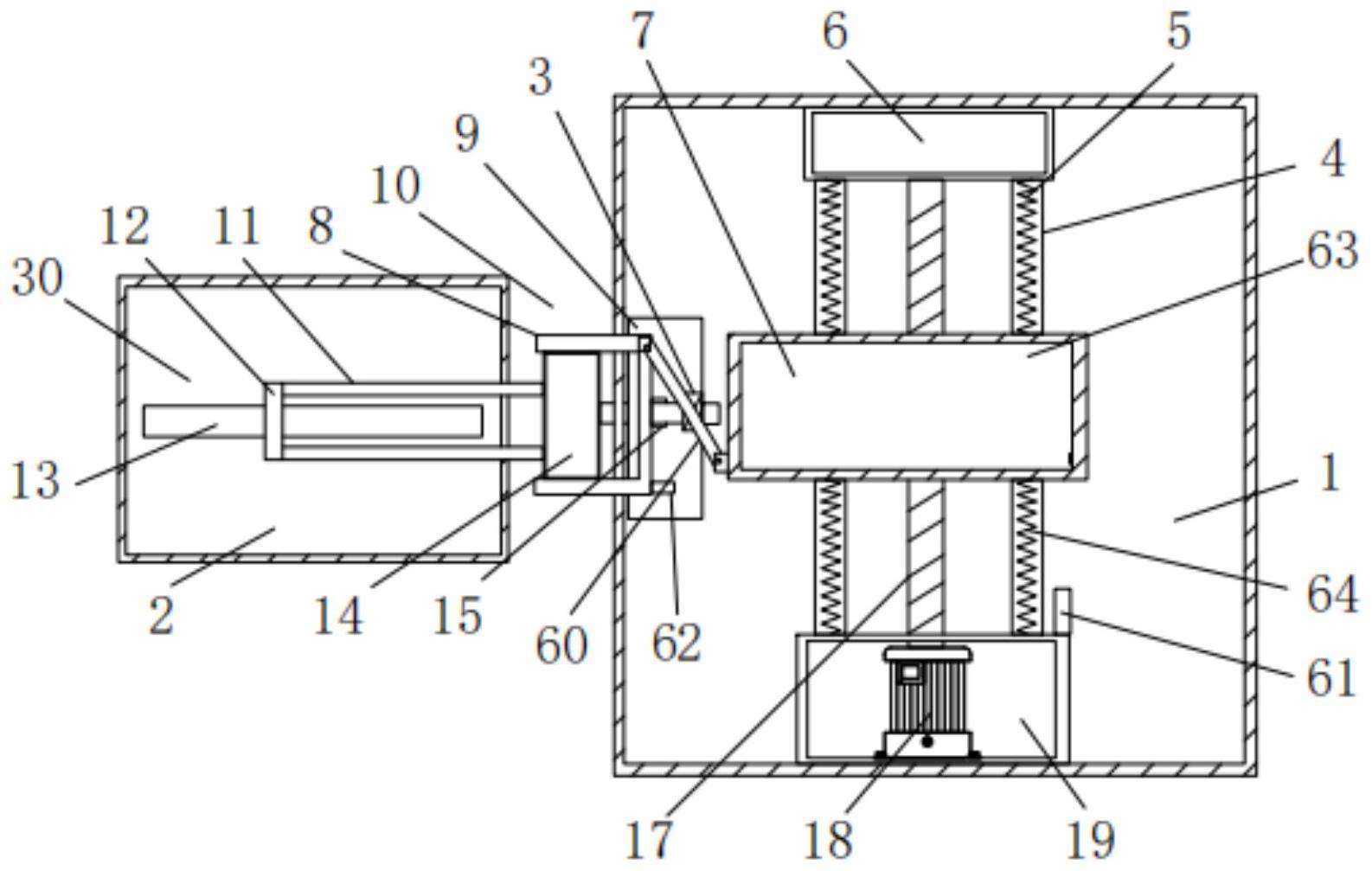
2、为解决上述技术问题,本发明公开了一种面向二自由度肢体关节的力位感知装置,包括:折叠组件、水平移动组件和摆动组件,所述折叠组件设置在第二安装座,所述水平移动组件和摆动组件均设置于第一安装座上,所述第一安装座和第二安装座上均设有紧固带,且所述紧固带上设有力传感器,所述折叠组件包括:第二辅助装置和第一角度传感器,所述水平移动组件包括:位移传感器;所述摆动组件包括:第一辅助装置和第二角度传感器,所述摆动组件的左右两端分别与折叠组件和水平移动组件连接,所述力位感知装置用于构成人体二自由度的肢体。
3、优选的,所述水平移动组件还包括:第一电机、螺纹杆和移动箱,所述第一电机固定设置于第一安装箱内,所述第一电机上端通过输出轴固定连接螺纹杆,所述螺纹杆上啮合连接移动箱,所述第一安装箱上端设有位移传感器。
4、优选的,所述第一安装箱上左右对称设有稳定杆,所述稳定杆上下两端分别与第二安装箱和第一安装箱转动连接,且所述第一安装箱和第二安装箱均固定设置在第一安装座上。
5、优选的,所述移动箱上侧左右对称设有第一缓冲弹簧,所述移动箱下侧左右对称设有第二缓冲弹簧,所述第一缓冲弹簧上端固定连接第二安装箱,所述第二缓冲弹簧下端固定连接第一安装箱。
6、优选的,所述摆动组件还包括:c型连杆和第一连杆,所述第一连杆左侧铰接c型连杆上,所述第一连杆右侧铰接在移动箱上,所述c型连杆右端固定连接固定块、梯形块和第二角度传感器,所述固定块转动连接在安装块上。
7、优选的,所述安装块上还设有第一辅助装置,所述第一辅助装置包括:
8、双轴电机,所述双轴电机左右两端通过输出轴固定连接第一转动杆,右侧的所述第一转动杆向右穿过l型稳定板,且右侧的所述第一转动杆上固定设有第一齿轮和两个左右对称的转动环,所述转动环上固定连接一根伸缩杆,所述伸缩杆的另一端固定连接转动块,且所述转动块转动连接在第二连杆上,所述第二连杆左端固定设有第二齿轮,所述第二齿轮啮合连接第一齿轮;
9、所述第二连杆上还转动连接有第三连杆,所述第三连杆上端铰接在第四连杆的一端,所述第四连杆的中央位置与l型稳定板转动连接,所述第四连杆左侧固定连接两个移动块,所述移动块设置于梯形块右端。
10、优选的,右侧的所述第一转动杆上还固定设有凸轮,所述凸轮周侧设有接触块,所述接触块左侧两侧对称设有第四连杆,所述第四连杆靠外的一侧固定设有滑动板,所述滑动板滑动设置在第一安装座上,且所述滑动板上固定设有伸出杆,所述伸出杆上套接有第一弹簧,所述第一弹簧的另一端固定设置在第一棘爪上,所述第一棘爪转动连接在滑动板上;
11、所述第一安装座上还固定设有第一固定板,所述第一固定板上转动设有棘轮和第二棘爪,所述第一棘爪和第二棘爪均抵接在棘轮上,所述第二棘爪上固定设有第二弹簧,所述第二弹簧的另一端固定连接在第二固定板上,所述第二固定板固定设置在第一安装座上;
12、所述棘轮上设有线轮,所述线轮上绕接有紧固带。
13、优选的,所述折叠组件包括:转动筒,所述转动筒设置在c型连杆内,左侧的所述第一转动杆延伸进转动筒中,且所述第一转动杆与转动筒转动连接;
14、左侧的所述第一转动杆上固定设有转动轮,所述转动轮上设有凸起,所述凸起下端啮合连接齿轮,所述齿轮中间位置贯穿连接第二转动杆,所述第二转动杆上上下对称设有转轮,所述转轮上设有夹持块,所述夹持块上设有第一角度传感器所述夹持块上固定连接驱动杆,所述驱动杆的另一端固定连接滑动杆,所述滑动杆滑动连接在导轨上,且所述导轨固定安装在第二安装座上,且所述第二安装座位于第一安装座左侧。
15、优选的,所述第二安装座上还固定设有若干第二辅助装置,若干所述第二辅助装置包括:安装壳,所述安装壳靠内的一侧固定设有第二电机,所述第二电机通过输出轴固定连接第三转动杆,所述第三转动杆靠外的一侧固定连接转动筒,所述转动筒上设有弧形凸起;
16、所述安装壳内设有复位弹簧,所述复位弹簧的一端固定连接在安装壳的内壁上,所述复位弹簧的另一端固定设置在移动框上,所述移动框上下两端对称设有驱动块,所述驱动块贯穿移动框上下两侧壁,且所述驱动块与弧形凸起接触配合,所述移动框靠外的一侧固定连接紧固带。
17、本发明另公开了一种面向二自由度肢体关节的力位感知机器人,包括:控制中心和训练装置,所述控制中心和训练装置电连接,所述训练装置为力位感知装置;
18、所述控制中心可对位移传感器、第一角度传感器、第二角度传感器和力传感器的检测数值进行实时监测,判断紧固带的收紧情况以及训练是否达到预期效果,从而调整第一电机、第二电机和双轴电机的转速,或控制某个电机运转或停止。
技术特征:
1.一种面向二自由度肢体关节的力位感知装置,其特征在于,包括:折叠组件(30)、水平移动组件(7)和摆动组件(10),所述折叠组件(30)设置在第二安装座(2),所述水平移动组件(7)和摆动组件(10)均设置于第一安装座(1)上,所述第一安装座(1)和第二安装座(2)上均设有紧固带(20),且所述紧固带(20)上设有力传感器,所述折叠组件(30)包括:第二辅助装置(52)和第一角度传感器(65),所述水平移动组件(7)包括:位移传感器(61);所述摆动组件(10)包括:第一辅助装置(34)和第二角度传感器(62),所述摆动组件(10)的左右两端分别与折叠组件(30)和水平移动组件(7)连接,所述力位感知装置用于构成人体二自由度的肢体。
2.根据权利要求1所述的面向二自由度肢体关节的力位感知装置,其特征在于,所述水平移动组件(7)还包括:第一电机(18)、螺纹杆(17)和移动箱(63),所述第一电机(18)固定设置于第一安装箱(19)内,所述第一电机(18)上端通过输出轴固定连接螺纹杆(17),所述螺纹杆(17)上啮合连接移动箱(63),所述第一安装箱(19)上端设有位移传感器(61)。
3.根据权利要求2所述的面向二自由度肢体关节的力位感知装置,其特征在于,所述第一安装箱(19)上左右对称设有稳定杆(4),所述稳定杆(4)上下两端分别与第二安装箱(6)和第一安装箱(19)转动连接,且所述第一安装箱(19)和第二安装箱(6)均固定设置在第一安装座(1)上。
4.根据权利要求3所述的面向二自由度肢体关节的力位感知装置,其特征在于,所述移动箱(63)上侧左右对称设有第一缓冲弹簧(5),所述移动箱(63)下侧左右对称设有第二缓冲弹簧(64),所述第一缓冲弹簧(5)上端固定连接第二安装箱(6),所述第二缓冲弹簧(64)下端固定连接第一安装箱(19)。
5.根据权利要求2所述的面向二自由度肢体关节的力位感知装置,其特征在于,所述摆动组件(10)还包括:c型连杆(8)和第一连杆(60),所述第一连杆(60)左侧铰接c型连杆(8)上,所述第一连杆(60)右侧铰接在移动箱(63)上,所述c型连杆(8)右端固定连接固定块(15)、梯形块(32)和第二角度传感器(62),所述固定块(15)转动连接在安装块(9)上。
6.根据权利要求5所述的面向二自由度肢体关节的力位感知装置,其特征在于,所述安装块(9)上还设有第一辅助装置(34),所述第一辅助装置(34)包括:
7.根据权利要求6所述的面向二自由度肢体关节的力位感知装置,其特征在于,右侧的所述第一转动杆(16)上还固定设有凸轮(35),所述凸轮(35)周侧设有接触块(33),所述接触块(33)左侧两侧对称设有第四连杆(36),所述第四连杆(36)靠外的一侧固定设有滑动板(37),所述滑动板(37)滑动设置在第一安装座(1)上,且所述滑动板(37)上固定设有伸出杆(45),所述伸出杆(45)上套接有第一弹簧(38),所述第一弹簧(38)的另一端固定设置在第一棘爪(43)上,所述第一棘爪(43)转动连接在滑动板(37)上;
8.根据权利要求6所述的面向二自由度肢体关节的力位感知装置,其特征在于,所述折叠组件(30)包括:转动筒(14),所述转动筒(14)设置在c型连杆(8)内,左侧的所述第一转动杆(16)延伸进转动筒(14)中,且所述第一转动杆(16)与转动筒(14)转动连接;
9.根据权利要求8所述的面向二自由度肢体关节的力位感知装置,其特征在于,所述第二安装座(2)上还固定设有若干第二辅助装置(52),若干所述第二辅助装置(52)包括:安装壳(66),所述安装壳(66)靠内的一侧固定设有第二电机(59),所述第二电机(59)通过输出轴固定连接第三转动杆(58),所述第三转动杆(58)靠外的一侧固定连接转动筒(55),所述转动筒(55)上设有弧形凸起(57);
10.一种面向二自由度肢体关节的力位感知机器人,其特征在于,包括:控制中心和训练装置,所述控制中心和训练装置电连接,所述训练装置为力位感知装置;
技术总结
本发明提供一种面向二自由度肢体关节的力位感知装置及机器人,包括:折叠组件、水平移动组件和摆动组件,所述折叠组件设置在第二安装座,所述水平移动组件和摆动组件均设置于第一安装座上,所述折叠组件包括:第一角度传感器,所述水平移动组件包括:位移传感器;所述摆动组件包括:第二角度传感器,所述摆动组件的左右两端分别与折叠组件和水平移动组件连接,所述力位感知装置用于构成人体二自由度的肢体。本发明通过设置水平移动组件和摆动组件,可自由控制关节的角度变化,同时可在训练中实时获取实际运动的位置及其力矩信息,避免了力矩或位移过大造成的关节损伤,有效的完成康复训练。
技术研发人员:周锋,胡鑫力,郭乃宏,高淦,王如刚
受保护的技术使用者:盐城工学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!