一种桥梁厢梁内巡检机器人的制作方法
1.本技术涉及巡检机器人技术领域,具体涉及一种桥梁厢梁内巡检机器人。
背景技术:
2.桥梁巡检任务量大、窗口期短和危险性高等因素,轨道交通桥梁检测迫切需要智能化桥梁检测装备,降低劳动强度,提升安全性。桥梁定期巡检是桥梁保养和维护重要手段。根据铁总供电[2018]125号文件和铁运[2011]131号23文件等文件要求,桥梁隧道检查工区每半年对管内设备检查一遍。特别是桥梁检查作业,面临高空作业、强电受限空间、跨山跨水,夜间窗口作业等问题,给人工作业带来一定的安全隐患。同时,由于桥梁分布广,地理空间跨度大,厢梁内需要检测的项目多,包含渗水、白浆、裂缝、空鼓等项目就高达几十项、导致人工作业任务重,强度高、花费时间长。现有技术中,桥梁厢梁内检测主要为依靠人工携带设备及依靠人眼进行观察和检测,不仅劳动强度高,且检测结果有偏差,因此,急需一款全自动检测设备来实现铁路桥梁的巡检结果的客观性、一致性及可追溯性。
技术实现要素:
[0003]
有鉴于此,本技术提供一种桥梁厢梁内巡检机器人,以解决上述技术问题。
[0004]
为实现上述目的,本发明提供如下技术方案:
[0005]
一种桥梁厢梁内巡检机器人,其特征在于,包括支撑框架、一对驱动机构、一对履带和快拆电池机构,所述驱动机构和所述快拆电池机构均安装在所述支撑框架上,所述履带套设在相应的驱动机构上,所述驱动机构能够带动相应的履带移动,所述支撑框架上还设有主控板以及与所述主控板相连接的避障雷达、防跌落设备、激光雷达和视觉相机,所述支撑框架上还设有wifi及5g设备,能够使得所述主控板能够联网。
[0006]
进一步地,所述支撑框架的前端设有防撞条。
[0007]
更进一步地,所述支撑框架的顶部还设有音箱、三色灯、总开关和急停开关,所述音箱与所述三色灯相连接,所述三色灯通过颜色的变化来指示不同的工作状态,所述音箱具有语音播报功能。
[0008]
进一步地,所述驱动机构包括:
[0009]
设置在所述支撑框架前端的电机减速器总成;
[0010]
连接在相应的所述电机减速器总成外侧的连接轴;
[0011]
连接在相应的所述连接轴上的驱动轮;
[0012]
设置在所述支撑框架后端的张紧轮,所述履带套设在相应的驱动轮和相应的张紧轮上。
[0013]
更进一步地,所述支撑框架侧面设有与相应的履带连接的两个导向轮,两个所述导向轮位于相应的驱动轮和相应的张紧轮之间。
[0014]
更进一步地,所述连接轴上套设有双列角接触球轴承,所述双列角接触球轴承的外侧与安装在所述支撑框架上的轴承座相连接,所述驱动轮与所述连接轴之间通过连接法
兰相连接,所述连接法兰连接在所述双列角接触球轴承的外侧,所述连接轴的外端端部连接有圆螺母。
[0015]
更进一步地,所述导向轮和所述张紧轮均通过支撑轴与所述支撑框架相连接。
[0016]
进一步地,快拆电池机构包括:
[0017]
设置在所述支撑框架后端的型材;
[0018]
对称设置在所述型材上的一对限位块;
[0019]
间隔设置在所述型材上的一对快拆安装座;
[0020]
一对均安装在相应的所述快拆安装座上的安装块;
[0021]
电池,所述电池通过滚珠门扣与相应的所述安装块卡合连接:
[0022]
该巡检机器人的工作运行遵循以下步骤:
[0023]
步骤一:工作人员将巡检机器人放入需要进行巡检的公路/铁路桥梁厢梁结构内,调节巡检机器人与桥梁结构梁体间的相对位置,打开巡检机器人的总开关使得巡检机器人进入预作业状态;
[0024]
步骤二:基于步骤一中的预作业作态,利用智能控制终端通过无线方式发送上行巡检控制指令,由巡检机器人上搭载的wifi及5g设备将接收的上行巡检控制指令传输至主控板,主控板根据所述上行巡检控制指令和避障雷达、激光雷达采集的信息,采用基于视觉和imu融合技术的直线行走平衡方法对机器人的运行轨迹进行不断修正,并通过红外测距来实现防跌落,通过库仑计获取电池的实时电量状态,当发生异常状态时,控制音箱和三色灯进行报警指示,并将报警信息反馈至智能控制终端,同时,控制视觉相机采集厢梁结构内各病害检测点的图像信息;
[0025]
步骤三:根据采集的图像信息利用基于机器学习、计算机视觉的病害分析方法进行目标识别,判断该病害检测点是否发生病害,若发生病害,则分析相应的风险等级信息,并将风险等级信息反馈至所述智能控制终端,若未发生病害,则控制驱动机构驱动巡检机器人继续移动至下一病害检测点进行病害检测。
[0026]
进一步地,所述采用基于视觉和imu融合技术的直线行走平衡方法对机器人的运行轨迹进行不断修正的步骤如下:
[0027]
对机器人走直线过程中所产生误差类型进行分类判断,所述误差类型包括累计误差和瞬时误差范围都在允许的范围内、累计误差在允许范围内而瞬时误差不在允许范围内、累计误差不在允许范围内而瞬时误差在允许范围内、累计误差和瞬时误差都不在允许的范围内;
[0028]
若累计误差和瞬时误差范围都在允许的范围内,不对左右电机做修正,即修正量的大小为零;
[0029]
若累计误差在允许范围内,而瞬时误差不在允许范围内,根据瞬时误差和修正力度因子a1的值对左右电机进行修正,其修正量大小为:;
[0030]
若累计误差不在允许范围内,而瞬时误差在允许范围内,根据累计误差和修正力度因子a2的值对左右电机进行修正,其修正量大小为:;
[0031]
若累计误差和瞬时误差都不在允许的范围内,则根据两者的大小以及修正力度因子a1和a2的大小来对左右电机进行修正,其修正量大小为:;
[0032]
于是,机器人在运动中:若右电机的功率级别是100,则左电机的功率级别为:
[0033]
,其中,y1是左电机的功率级别。
[0034]
从上述的技术方案可以看出,本发明的优点是:
[0035]
1.本发明由移动履带底盘搭载视觉相机、防跌落、自主导航、自主避障,通过自主导航和视觉相机对厢梁内进行全方面拍摄扫描分析,再通过wifi及5g设备进行传输来对厢梁内病害进行检测和备份,工作人员只需在终端电脑和手提设备上即可时时查看具体病害情况及追溯往期桥梁厢梁内情况,从而实现巡检结果客观性、一致性及可追溯性。
附图说明
[0037]
构成本技术的一部分的附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。
[0038]
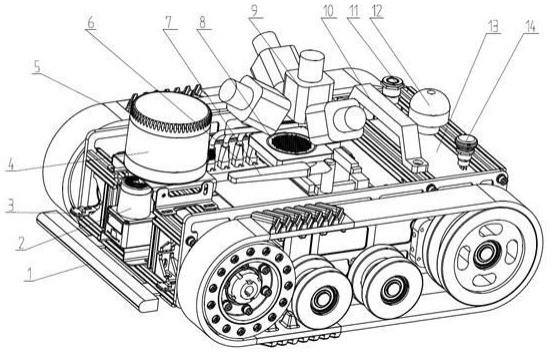
图1为本技术的结构示意图。
[0039]
图2为本技术的驱动机构的结构示意图。
[0040]
图3为图1的部分结构的示意图。
[0041]
图4为本技术的快拆电池机构的立体图。
[0042]
图5为图4的正视图。
[0043]
图6为本实施例中巡检机器人的工作运行步骤示意图。
[0044]
图7为本实施例中巡检机器人的控制组成结构示意图。
[0045]
图8为本实施例中对机器人的运行轨迹进行不断修正的步骤示意图。
[0046]
附图标记列表:防撞条1、避障雷达2、防跌落设备3、激光雷达4、驱动机构5、wifi及5g设备6、主控板7、音箱8、视觉相机9、第一把手10、总开关11、三色灯12、快拆电池机构13、急停开关14;驱动机构5、履带51、驱动轮52、圆螺母53、连接法兰54、轴承座55、双列角接触球轴承56、连接轴57、电机减速器总成58、导向轮59、支撑轴承60、支撑轴61、张紧轮62、支撑框架63;快拆电池机构13:型材1301、限位块1302、快拆安装座1303、电池1304、安装块1306、滚珠门扣1308、第二把手1309。
具体实施方式
[0047]
为使本技术的目的、技术方案和优点更加清楚明白,下面结合实施方式和附图,对本技术做进一步详细说明。在此,本技术的示意性实施方式及其说明用于解释本技术,但并不作为对本技术的限定。
[0048]
随着科技的发展,人们在出行上有了很大的变化,由以前的人力车转换为自行车,再从自行车转换为汽车,而目前,我国在交通方面有了很大的进步,普通快车、动车和高铁已经进入了人们的日常生活,不仅缩短了距离,也拉进了两座城市之间的关系。车辆的安全运行离不开日常维护,随着车辆行驶时间增长,厢梁内上会出现一些病害,因此需要进行定期巡检,根据铁总供电[2018]125号文件和铁运[2011]131号23文件等文件要求,桥梁隧道
检查工区每半年对管内设备检查一遍。
[0049]
现有技术中,巡检通常为人工巡检携带设备及依靠人眼进行观察和检测,即通过感官进行病害判断,主观因素较多,再者,人工作业不仅任务量大,且窗口期短、危险性高,特别是桥梁检查作业,面临高空作业、强电受限空间、跨山跨水,夜间窗口作业等问题,也给人工作业带来一定的安全隐患。同时,由于桥梁分布广,地理空间跨度大,厢梁内需要检测的项目多,包含渗水、白浆、裂缝、空鼓等项目就高达几十项、导致人工作业任务重,强度高、花费时间长。
[0050]
本技术通过可移动的履带搭载视觉相机、自主导航和自主避障,通过视觉相机对桥梁厢梁内的病害进行拍摄,再将拍摄的数据传送至主控板,主控板不仅能够对数据进行分析处理,还能将数据进行存储,使得巡检可追溯,相对于人工巡检来说,不仅降低了劳动强度,且巡检结果更加客观和一致,对于铁路桥梁的巡检来说具有非常大的进步。
[0051]
参考图1至图5,如图1所示,本实施例提供一种桥梁厢梁内巡检机器人,包括支撑框架63、一对驱动机构5、一对履带51和一快拆电池机构13,所述驱动机构5和所述快拆电池机构13均安装在所述支撑框架63上,所述履带51套设在相应的所述驱动机构5上,所述驱动机构5能够带动相应的所述履带51移动,所述快拆电池机构13用于提供电力支持,所述支撑框架63上还设有主控板7以及与所述主控板7相连接的避障雷达2、防跌落设备3、激光雷达4和视觉相机9,所述支撑框架63上还设有wifi及5g设备6,能够使得所述主控板7能够联网。
[0052]
优选地,视觉相机9的数量为四个,分别用于拍摄前、左、右和上方的情况。
[0053]
优选地,支撑框架63上还设有第一把手10,能够将机器人整体提起,使得搬运更加方便。
[0054]
优选地,所述防跌落设备3包括一距离传感器,所述距离传感器能够检测与地面的距离,当机器人前方有低台阶或凹坑时,距离传感器能够检测到数值的变化,通过信号传输至主控板7处,主控板7控制机器人停止,能够避免机器人整体跌落的情况出现,使得使用更加安全。
[0055]
优选地,所述支撑框架63的前端设有防撞条1,所述防撞条1内部搭载触点开关,当防撞条1受到撞击时,所述触点开关启动,使得驱动机构5停止工作,从而机器人整体停止工作。
[0056]
优选地,激光雷达4和避障雷达2均是通过发射雷达束来进行工作,两者相互配合,能够实现机器人在桥梁厢梁内的自主行走,再配合防撞条1,能够使得巡检更加安全可靠。
[0057]
优选地,所述支撑框架63的顶部还设有音箱8、三色灯12、总开关11和急停开关14,所述音箱8与所述三色灯12相连接,所述三色灯12通过三种颜色的变化来指示不同的工作状态,所述音箱8具有语音播报功能。
[0058]
优选地,所述三色灯12的颜色为红、黄和绿,当机器人正常巡检时,绿灯亮,当避障时,红灯亮,当电量低时,黄灯亮,音箱8具有语音播报功能,能够在巡检的过程中进行随时播报信息,使得工作人员能够根据播报信息及时获取机器人的工作情况。
[0059]
优选地,总开关11控制整个机器人的启闭情况,有紧急情况时,工作人员可动手按下急停开关14,整个机器人就会停止工作,需要正常工作时,将急停开关14向上拉起使其复位即可。
[0060]
如图2所示,所述驱动机构5包括:电机减速器总成58,所述电机减速器总成58设置
在所述支撑框架63的前端;连接轴57,所述连接轴57连接在相应的所述电机减速器总成58的外侧;驱动轮52,所述驱动轮52连接在相应的所述连接轴57上;张紧轮62,所述张紧轮62设置在所述支撑框架63的后端,所述履带51套设在相应的驱动轮52和相应的张紧轮62上。
[0061]
如图3所示,所述支撑框架63侧面设有与相应的履带51连接的两个导向轮59,两个所述导向轮59位于相应的驱动轮52和相应的张紧轮62之间,导向轮59能够起到支撑履带51的作用,使得履带51转动和行走更加顺畅。
[0062]
优选地,所述连接轴57上套设有双列角接触球轴承56,所述双列角接触球轴承56的外侧与安装在所述支撑框架63上的轴承座55相连接,所述驱动轮52与所述连接轴57之间通过连接法兰54相连接,所述连接法兰54连接在所述双列角接触球轴承56的外侧,所述连接轴57的外端端部连接有圆螺母53,所述圆螺母53起到锁紧和固定的作用,能够防止驱动轮52横向偏移。
[0063]
优选地,所述导向轮59和所述张紧轮62均通过支撑轴61与所述支撑框架63相连接。
[0064]
优选地,所述导向轮59和所述张紧轮62均通过支撑轴承60与相应的所述支撑轴61相连接。
[0065]
如图4所示,快拆电池机构13包括:型材1301,所述型材1301设置在所述支撑框架63的后端;一对限位块1302,一对限位块1302对称设置在所述型材1301上;一对快拆安装座1303,一对快拆安装座1303间隔设置在所述型材1301上;一对安装块1306,所述安装块1306安装在相应的所述快拆安装座1303上;电池1304,所述电池1304通过滚珠门扣1308与相应的所述安装块1306卡合连接。
[0066]
优选地,一对限位块1302分别位于电池1304的两侧,能够限制电池1304在左右方向的运动,使得安装更加简单轻松。
[0067]
如图5所示,所述滚珠门扣1308连接在所述电池1304的前侧,所述电池1304的后侧设有第二把手1309,以便取放电池1304时更加轻松省力。
[0068]
优选地,通过将滚珠门扣1308与安装块1306配合,能够实现电池1304的快速更换,从而实现机器人的模块化更换,使得使用更加方便。
[0069]
如图6所示,该巡检机器人的工作运行遵循以下步骤:
[0070]
步骤一:工作人员将巡检机器人放入需要进行巡检的公路/铁路桥梁厢梁结构内,调节巡检机器人与桥梁结构梁体间的相对位置,打开巡检机器人的总开关11使得巡检机器人进入预作业状态;
[0071]
步骤二:基于步骤一中的预作业作态,利用智能控制终端通过无线方式发送上行巡检控制指令,由巡检机器人上搭载的wifi及5g设备6将接收的上行巡检控制指令传输至主控板,主控板根据所述上行巡检控制指令和避障雷达2、激光雷达4采集的信息,采用基于视觉和imu融合技术的直线行走平衡方法对机器人的运行轨迹进行不断修正,并通过红外测距来实现防跌落,通过库仑计获取电池的实时电量状态,当发生异常状态时,控制音箱8和三色灯12进行报警指示,并将报警信息反馈至智能控制终端,同时,控制视觉相机9采集厢梁结构内各病害检测点的图像信息;
[0072]
步骤三:根据采集的图像信息利用基于机器学习、计算机视觉的病害分析方法进行目标识别,判断该病害检测点是否发生病害,若发生病害,则分析相应的风险等级信息,
并将风险等级信息反馈至所述智能控制终端,若未发生病害,则控制驱动机构5驱动巡检机器人继续移动至下一病害检测点进行病害检测。
[0073]
如图8所示,机器人需在箱梁内进行直线行走,并在直线行走过程中进行视觉拍摄并进行病害分析,故机器人导航采用视觉和imu混合的直线行走平衡方法进行轨迹修正,所述采用基于视觉和imu融合技术的直线行走平衡方法对机器人的运行轨迹进行不断修正的步骤如下:
[0074]
对机器人走直线过程中所产生误差类型进行分类判断,所述误差类型包括累计误差和瞬时误差范围都在允许的范围内、累计误差在允许范围内而瞬时误差不在允许范围内、累计误差不在允许范围内而瞬时误差在允许范围内、累计误差和瞬时误差都不在允许的范围内;
[0075]
若累计误差和瞬时误差范围都在允许的范围内,不对左右电机做修正,即修正量的大小为零;
[0076]
若累计误差在允许范围内,而瞬时误差不在允许范围内,根据瞬时误差和修正力度因子a1的值对左右电机进行修正,其修正量大小为:;
[0077]
若累计误差不在允许范围内,而瞬时误差在允许范围内,根据累计误差和修正力度因子a2的值对左右电机进行修正,其修正量大小为:;
[0078]
若累计误差和瞬时误差都不在允许的范围内,则根据两者的大小以及修正力度因子a1和a2的大小来对左右电机进行修正,其修正量大小为:;
[0079]
于是,在本实施例中,机器人在运动中:若右电机的功率级别是100,则左电机的功率级别为:
[0080]
,其中,y1是左电机的功率级别。
[0081]
工作原理:工作人员将巡检的机器人放入厢梁内,打开机器人总开关11,在上位机软件界面上点击开始巡检等相关内容,桥梁厢梁内病害检测机器人接收到任务,采用自主导航和自主避障技术即可在厢梁内进行自主检测,通过视觉相机时时拍摄厢梁内情况并通过视觉分析时时检测从而达到病害时时监测,机器人可通过wifi或者5g信号时时进行传输,当遇到病害处,系统可通过三色灯12的红灯亮以及音箱8播报的方式进行报警并记录当前位置来反馈给工作人员,当机器人出现失控时遇到通过孔、洞或台阶时可以防止机器人跌落损坏。
[0082]
如图7中巡检机器人的控制组成结构所示,机器人在桥梁厢梁内运行,主要依靠主控板7进行控制,通过canopen通信,下发速度指令给驱动器,驱动器进行电机控制,同时驱动器反馈位置信息给工控机从而实现机器人前进、后退、原地转弯等功能;通过库仑计获取电池1304的时时电量状态;通过灯光、音箱8、远程终端起到报警状态;通过避障雷达2、防撞条1、急停开关14实现避障;通过激光雷达4实现机器人在厢梁内进行自主行走;通过红外测距来实现防跌落;通过wifi或者5g路由器的方式,实现手持终端、远端服务器与机器人的通信,通过手持终端控制机器人的运行及获取视觉相机的数据,机器人还可以通过wifi将视
觉相机9采集到的数据传输到远程端。
[0083]
本发明中采用四个视觉相机9进行机器人正全方位拍摄,并通过系统检测数据实现毫米级指标量化,并通过开发面向桥梁安全的高效数据管理与挖掘技术,研究铁路桥梁表面采集数据与设施/运行安全的关联规则,设计建立桥梁部件安全状态分析模型与基于决策机制的安全风险专家系统,实现桥梁病害的大数据库建立及风险预警。
[0084]
本发明中厢梁病害数据采集、处理、分析、预测执行如下交互:视觉相机通过自主导航在桥梁厢梁内进行巡检,当视觉相机遇到需要巡检的地方,工控机获取抓拍指令,并将所述抓拍指令发送给桥梁厢梁内病害检测机器人;桥梁厢梁内病害检测机器人在接收到所述抓拍指令时,触发四个视觉相机接收所述抓拍指令,对拍摄到的场景进行抓拍;机器人对抓拍得到的图像进行目标识别或接收机器人发送的抓拍得到的图像进行目标分析并与数据库中的病害模型就行对比,得出相应的风险等级,并反馈到手持终端或者远端服务器进行相对应的数据存储。若该检测点不存在风险,则机器人在导航的作用下控制驱动机构5驱动巡检机器人继续移动至下一病害检测点。
[0085]
优选地,在厢梁内定点设置二维码照片,二维码具有定位功能,机器人通过视觉相机9对二维码进行拍摄,便可知目前所处的位置,当该点具有病害时,机器人也能了解病害所在的位置,以便能够及时将数据传回手持终端或者远端服务器。
[0086]
以上所述仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术实施例可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1