一种圆柱坐标型工业机器人的制作方法
本发明属于工业机器人,具体为一种圆柱坐标型工业机器人。
背景技术:
1、工业上为了提高上车效率,通常采用工业机器人进行工业操作,其中广泛应用的为圆柱坐标型机器人,圆柱坐标型机器人是机器人类型之一,这种机器人以θ、z和r为参数构成坐标系,手腕参考点的位置可表示为p=f(θ,z,r)。其中,r是手臂的径向长度,θ是手臂绕水平轴的角位移,z是在垂直轴上的高度。如果r不变,操作臂的运动将形成一个圆柱表面,空间定位比较直观。
2、现有技术中的圆柱坐标型工业机器人,在实现工件夹持时,利用夹爪进行夹持,并配合机器人的转动和升降等操作,实现工件移动,然而在实际夹持工件过程中,需要应对的工件种类较多,由于目前的夹爪夹持面为刚性材质,在应对刚性工件时具有良好的稳定型抓取,然而在针对脆性工件时,在刚性夹持过程中,由于夹持力量难以控制,使得在脆性材料工件夹持时出现表面严重变形,部分材质强度较差的工件在实际夹持中出现一定程度的损害,实际夹持适用效果不佳,不能针对不同材质进行安全型抓取,适用效果不佳。
3、此外,现有技术中的圆柱坐标型工业机器人,在进行升降、横移以及旋转实现不同位置处工件夹持操作时,很大程度依赖回转过程进行较大幅度的转动,通常采用电机带动小齿轮旋转并利用配合的大齿轮,实现回转控制,然而实际在回转控制后针对回转后的定位难以快速确定,通常需要增设一组动力机构配合刹车机构完成止停控制,实际对多组动力机构进行操纵,机器人复杂程度大幅度增高,机器人成本增加。
技术实现思路
1、本发明的目的在于提供一种圆柱坐标型工业机器人,以解决上述背景技术中提出的问题。
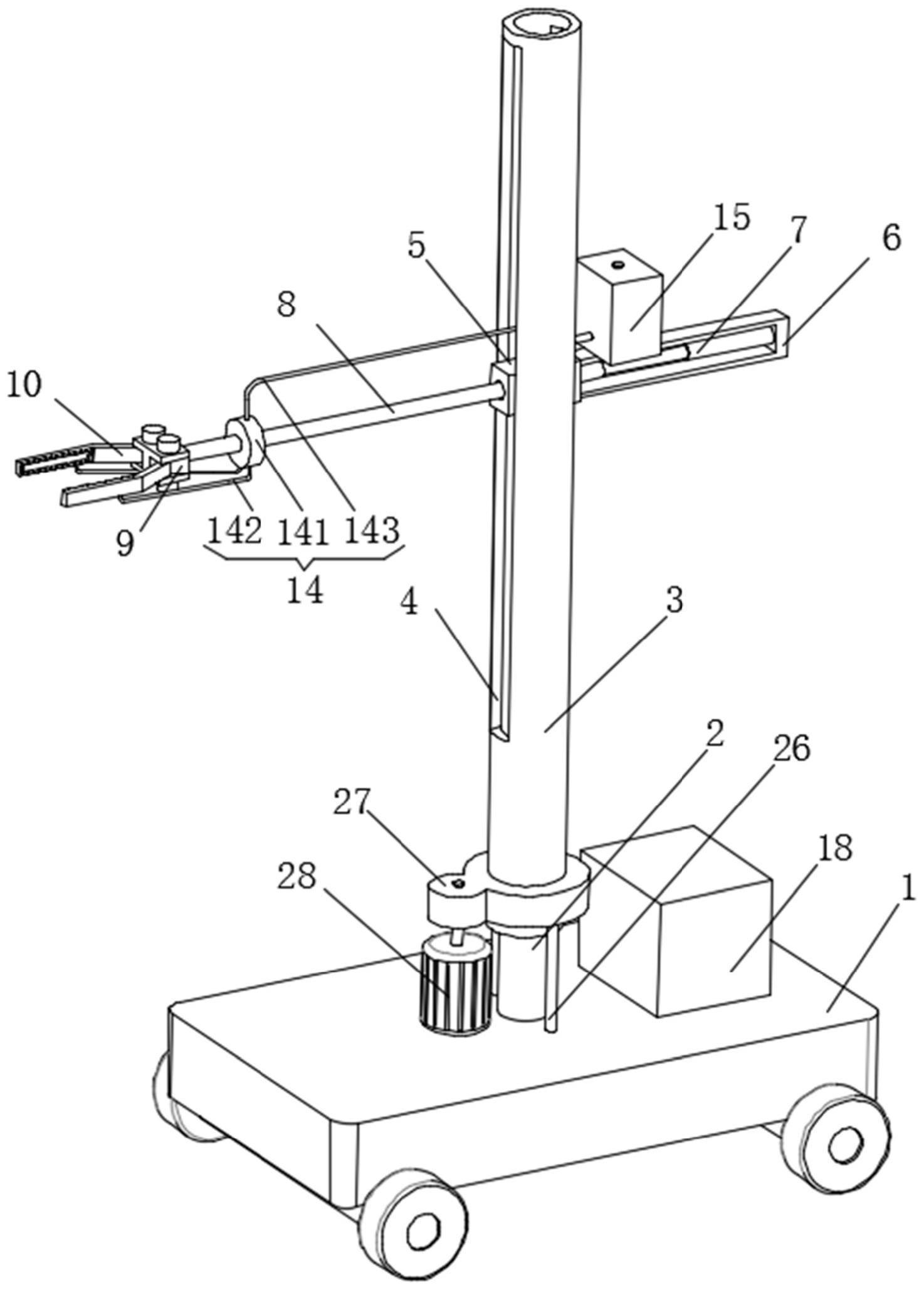
2、为了实现上述目的,本发明提供如下技术方案:一种圆柱坐标型工业机器人,包括底座,所述底座的顶面固定安装有固定轴,所述固定轴的外表面活动安装有活动管,所述活动管的侧面开设有侧槽,所述活动管的内表面固定套接有安装板,所述安装板的顶面固定安装有纵向伸缩杆,所述纵向伸缩杆的顶面固定安装有活动板,所述活动板的端面活动套接有安装臂,所述安装臂的端面设有夹持头,所述夹持头的正面活动安装有夹爪,所述夹爪的内侧面和底面分别开设有内槽和通孔,所述内槽的内表面固定套接有弹性气囊,所述安装臂的外表面固定安装有分配机构,所述分配机构的一端与夹住固定连通,所述活动板的顶面固定安装有供液机构,所述分配机构的另一端与供液机构相连通,所述底座的顶面固定安装有电机,所述电机输出轴的外表面固定套接有动力齿轮,所述活动管的外表面固定套接有从动齿轮,所述从动齿轮与动力齿轮啮合连接。
3、第一实施例:如图1、图2、图3、图4、图5、图6和图7所示,当进行脆性材料工件夹持时,启动电机,使得电机带动动力齿轮旋转,从而带动啮合的从动齿轮旋转,使得活动管绕着固定轴旋转,在旋转至工件一侧后,启动纵向伸缩杆,使得夹爪并靠近工件,随后横向伸缩杆动作并推动夹爪移动至工件外侧,夹持头动作使得夹爪两侧靠拢,同时启动供液机构,使得液泵将存储箱中的压力油泵入至分配机构中,并通过一号管并配合通孔输入至弹性气囊中,使得位于夹爪内侧面处的弹性气囊逐渐膨胀,并随着两侧弹性气囊膨胀后从外侧包裹并夹持住工件,并进行移动搬运即可。
4、首先,通过在夹爪的内侧面安装可伸缩和膨胀变化的弹性气囊,并增设供液机构,配合分配机构,当需要对脆性工件进行夹持时,随着夹爪靠近夹持工件,使得供液机构将压力油经由分配机构泵送至弹性气囊中,使得夹持时弹性气囊通入压力油而膨胀,并利用弹性气囊的柔性效果,使得实际在夹持通过包裹的方式夹持住脆性工件,实现有效的柔性夹持,避免刚性直接接触下损害工件,保证工件夹持时的结构稳定,大大提高了实际夹持应用范围,使用安全性高。
5、此外,通过利用供液机构将压力有泵入弹性气囊中的方式,替代平面夹爪的直接接触,利用弹性气囊的柔性变形性质,在实际进行重量范围内的弧面工件夹持时,有效提高夹持时的接触面积,避免出现与夹爪接触时夹紧面过小的情况,从而大大提高了实际夹持的稳定性,针对多面体结构的工件以及曲面工件,具有良好的适应性,同时在撤去供液时使得弹性气囊复原收缩在内槽中,针对平面刚性工件以及重量较大的工件仍然具有良好的夹持效果,实际夹持稳定性高,且进一步提高使用范围。
6、优选的,所述活动板的外表面与侧槽活动套接,所述活动板的右端固定安装有固定架,所述固定架的内部固定安装有横向伸缩杆,所述横向伸缩杆的活动端与安装臂固定连接,通过利用横向伸缩杆配合纵向伸缩杆且配合电机,实现机器人的圆柱坐标型调节。
7、优选的,所述分配机构包括分配环、一号管和二号管,所述分配环固定套接在安装臂的外表面上,所述一号管的数量为两个,两个所述一号管均固定连通在分配环的底面上,所述二号管固定连通在分配环的顶面上,所述通孔的两端分别与一号管和弹性气囊相连通,通过利用分配机构将通入到分配环中的压力油均匀分配给两组夹爪处的弹性气囊中,实现两侧均匀膨胀,从而实现两侧均匀夹持。
8、优选的,所述供液机构包括液泵、存储箱、中间管和控制阀,所述液泵固定安装在活动板的顶面上,所述控制阀固定连通在液泵的顶面上,所述存储箱固定安装在固定架的顶面上,所述中间管固定连通在液泵和存储箱之间,所述控制阀与二号管固定连通,所述控制阀的端面固定连通有连通管,通过利用供液机构提供压力油,从而实现升压操作,配合控制阀的切换,从而改变供液方向的改变,在将压力油通入到弹性气囊中时,实现弹性气囊的膨胀并替代夹爪的侧面进行接触夹持,在将压力油通入到安装板的内腔时,通过压力油推动止停机构下移,提高卡环和环槽之间的阻尼,实现回转止停控制。
9、优选的,所述活动管的内表面固定套接有卡环,所述固定轴的外表面开设有环槽,所述环槽的内表面与卡环活动套接,通过利用环槽和卡环的活动套接,使得活动管和固定轴具有稳定的旋转效果,且在环槽与卡环高压力接触时,增强摩擦阻尼,减小回转趋势,从而实现止停控制。
10、优选的,所述安装板的内部从上往下分别开设有内腔、套孔和卡槽,所述套孔的上下两端分别与内腔和卡槽相连通,所述安装板的顶面与连通管固定连通,所述安装板的顶面开设有圆孔,所述圆孔的上下端分别与连通管和内腔相连通,通过利用内腔、套孔和圆孔,实现压力油的给入,并实现安装板内部增压,从而实现止停机构的推动控制。
11、优选的,所述安装板的底面活动安装有止停机构,所述止停机构位于固定轴的上方,所述内腔的内部固定连接有弹簧,所述弹簧的下端与止停机构固定连接,通过利用弹簧的弹性,保证撤去内腔中油压后可带动止停机构复位。
12、优选的,所述止停机构包括摩擦板、套杆和活动塞,所述摩擦板活动套接在卡槽的内部,所述套杆固定连接在摩擦板的顶面上,所述套杆的外表面与套孔活动套接,所述活动塞固定连接在套杆的顶面上,所述活动塞活动套接在套孔的内部且与弹簧固定连接,通过控制止停机构的下移,实现活动管和固定轴之间的压力增加,在提高环槽内表面的顶面与卡环的接触压力时,提高阻尼,从而实现止停,避免自动回转,提高定位精度。
13、优选的,所述底座的顶面分别固定安装有固定杆和控制箱,所述固定杆的上端固定安装有安装箱,所述安装箱活动套接在活动管的外侧,所述安装箱位于动力齿轮和从动齿轮的外侧,通过利用控制箱综合控制机器人的运动,且通过利用安装箱密封动力齿轮和从动齿轮,配合内部通入的滑油,实现啮合润滑,降低转动噪音。
14、第二实施例:如图1、图2、图4、图6、图7和图8所示,当进行夹持前的位置调节时,随着电机带动动力齿轮旋转,并实现从动齿轮的旋转后,随着回转位置的确定,启动供液机构中的控制阀,并启动液泵,使得液泵将存储箱中抽吸的滑油经由控制阀泵送至连通管中,并通过连通管将压力油泵送至安装板的内腔中,使得不断增加的油压在内腔中推动止停机构下移,随着弹簧的拉伸,使得置止停机构中的摩擦板向下移动并压紧固定轴,使得活动管旋转方向的阻尼增加,完成止停;在需要针对脆性材料以及异性材料进行稳定性夹持时,操作控制阀使得控制阀关闭连通管的同时开启分配机构中二号管的连通,并启动液泵将存储箱中压力泵送至弹性气囊中,实现稳定型夹持,完成夹持后并需要回转搬运时,再次启动控制阀,使得控制阀动作,并使得连通管连通,同时二号管关闭,进行回转搬运即可。
15、首先,通过再次利用供液机构中的液泵和存储箱,并在增设控制阀后实现液泵的泵送方向的控制,且通过在安装板的底面活动安装止停机构,配合连通管以及安装板中的内腔和套孔,在需要止停时将压力油泵送至安装板中并推动止停机构下移压紧固定轴,从而增加活动管内表面上卡环与固定轴上环槽的压力和阻尼,实现回转止停,通过操作控制阀实现弹性气囊的通液和保压控制,以及实现安装板的内腔的通液和保压控制,在采用一组供液机构作用控制动力机构的情况下实现止停和夹持两组情况的控制,减少机器人上动力机构的增设和布置,降低投入成本,提高机器人控制效果,使用效果好。
16、本发明的有益效果如下:
17、1、本发明通过在夹爪的内侧面安装可伸缩和膨胀变化的弹性气囊,并增设供液机构,配合分配机构,当需要对脆性工件进行夹持时,随着夹爪靠近夹持工件,使得供液机构将压力油经由分配机构泵送至弹性气囊中,使得夹持时弹性气囊通入压力油而膨胀,并利用弹性气囊的柔性效果,使得实际在夹持通过包裹的方式夹持住脆性工件,实现有效的柔性夹持,避免刚性直接接触下损害工件,保证工件夹持时的结构稳定,大大提高了实际夹持应用范围,使用安全性高。
18、2、本发明通过利用供液机构将压力有泵入弹性气囊中的方式,替代平面夹爪的直接接触,利用弹性气囊的柔性变形性质,在实际进行重量范围内的弧面工件夹持时,有效提高夹持时的接触面积,避免出现与夹爪接触时夹紧面过小的情况,从而大大提高了实际夹持的稳定性,针对多面体结构的工件以及曲面工件,具有良好的适应性,同时在撤去供液时使得弹性气囊复原收缩在内槽中,针对平面刚性工件以及重量较大的工件仍然具有良好的夹持效果,实际夹持稳定性高,且进一步提高使用范围。
19、3、本发明通过再次利用供液机构中的液泵和存储箱,并在增设控制阀后实现液泵的泵送方向的控制,且通过在安装板的底面活动安装止停机构,配合连通管以及安装板中的内腔和套孔,在需要止停时将压力油泵送至安装板中并推动止停机构下移压紧固定轴,从而增加活动管内表面上卡环与固定轴上环槽的压力和阻尼,实现回转止停,通过操作控制阀实现弹性气囊的通液和保压控制,以及实现安装板的内腔的通液和保压控制,在采用一组供液机构作用控制动力机构的情况下实现止停和夹持两组情况的控制,减少机器人上动力机构的增设和布置,降低投入成本,提高机器人控制效果,使用效果好。
- 还没有人留言评论。精彩留言会获得点赞!