机械臂及机器人的制作方法
本申请涉及机器人,特别涉及一种机械臂及机器人。
背景技术:
1、宠物机器人中常用摆臂模拟人的手臂来使机器人更加拟人化,而此类机器人由于空间体积限制,大多只有一个方向的自由度,显得不够灵活。
2、在小体积限制下,现有的宠物机器人使用的摆臂大多只有一个自由度,具有两个自由度的基本为串联结构。串联机械臂的第二关节驱动件一般放置在第一关节中,需要第一关节驱动件具有较大驱动力矩且对造型约束较大。
技术实现思路
1、本申请提供一种机械臂,本申请还提供一种具有上述机械臂的机器人。
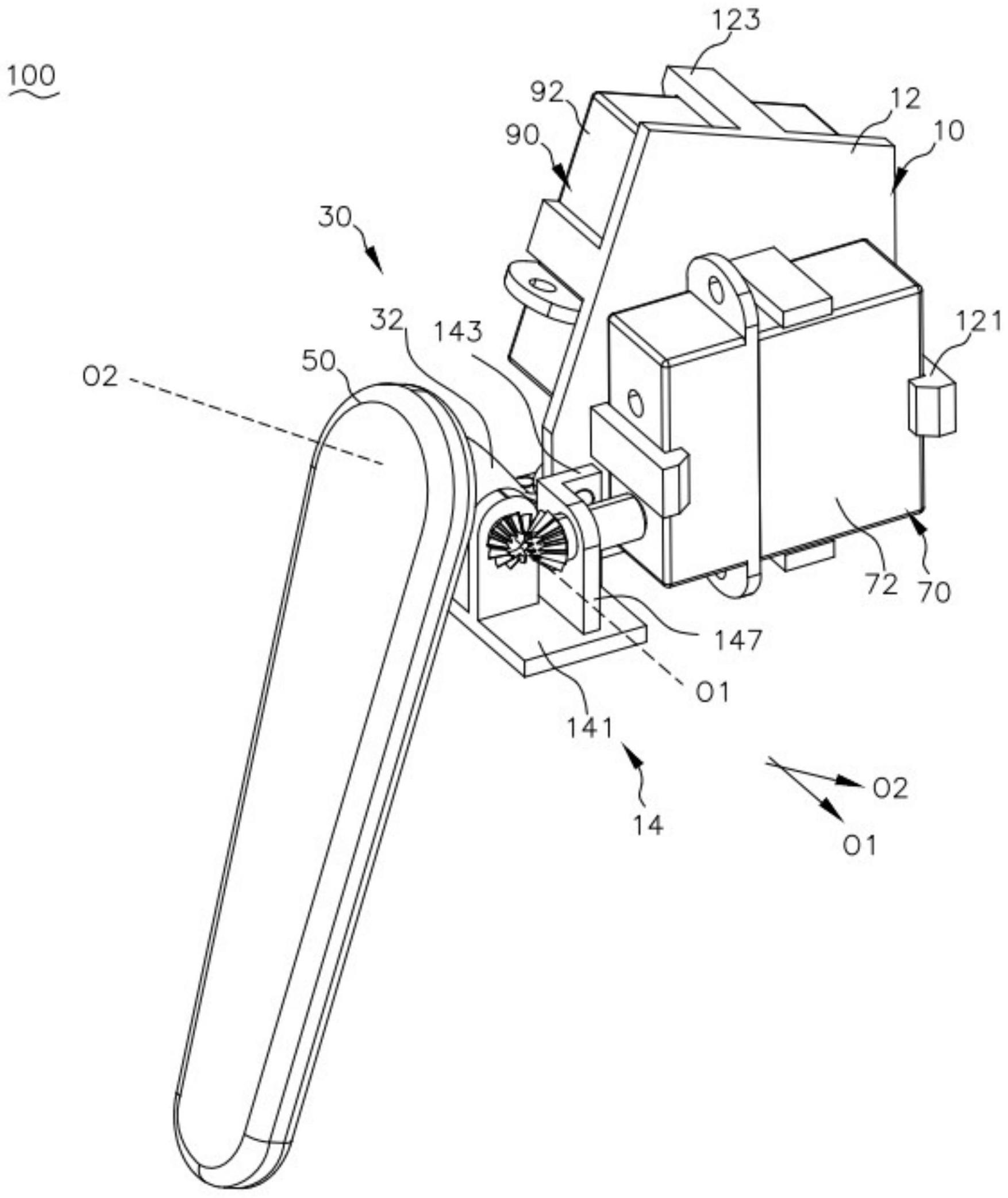
2、第一方面,本申请提供一种机械臂,包括安装架、关节连接件、运动执行件、第一驱动机构以及第二驱动机构。关节连接件可转动地设置于安装架,运动执行件可转动地连接于关节连接件。第一驱动机构设置于安装架且传动连接于关节连接件,第一驱动机构用于驱使关节连接件带动运动执行件相对于安装架绕第一轴线转动。第二驱动机构设置于安装架且传动连接于运动执行件,第二驱动机构用于驱使运动执行件相对于安装架绕第二轴线转动,第二轴线与第一轴线相交。
3、第二方面,本申请实施例还提供一种机器人,包括机体以及上述任一项的机械臂,机械臂连接于机体,安装架设置于机体内。
4、相对于现有技术,本申请实施例提供的机械臂应用于机器人中,第一驱动机构和第二驱动机构分别输出动力时,运动执行件可分别完成相对于安装架绕第一轴线转动、相对于安装架绕第二轴线转动。第一驱动机构和第二驱动机构同时输出时,机械臂即可获得复合的空间两自由度转动。第一驱动机构和第二驱动机构设置于安装架,安装架集成于机器人内,实现了机械臂在紧凑空间内的两自由度转动。
技术特征:
1.一种机械臂,其特征在于,包括:
2.如权利要求1所述的机械臂,其特征在于,所述安装架包括第一支架和第二支架,所述第一驱动机构和所述第二驱动机构分别设置于所述第一支架的相背两侧,所述关节连接件可转动地设置于所述第二支架,所述第二支架固定地连接于所述第一支架。
3.如权利要求2所述的机械臂,其特征在于,所述关节连接件包括壳体以及转动部,所述转动部连接于所述壳体的外壁,所述壳体通过所述转动部可转动地连接于所述第二支架。
4.如权利要求2所述的机械臂,其特征在于,所述第一驱动机构包括第一驱动件和第一传动组件,所述第一驱动件固定设置于所述第一支架,所述第一传动组件传动连接于所述第一驱动件和所述关节连接件之间。
5.如权利要求4所述的机械臂,其特征在于,所述第一传动组件包括相互啮合的主动锥齿轮和从动锥齿轮,所述主动锥齿轮连接于所述第一驱动件的驱动端,所述从动锥齿轮连接于所述关节连接件。
6.如权利要求1所述的机械臂,其特征在于,所述机械臂还包括转轴,所述转轴沿所述第二轴线穿设于所述关节连接件内且可转动地连接于所述关节连接件,所述转轴的一端连接于所述运动执行件,另一端传动连接于所述第二驱动机构。
7.如权利要求1~6中任意一项所述的机械臂,其特征在于,所述第二驱动机构包括第二驱动件和第二传动组件,所述第二驱动件固定设置于所述第一支架,所述第二传动组件的一端连接于所述第二驱动件、另一端穿设所述关节连接件并连接于所述运动执行件。
8.如权利要求7所述的机械臂,其特征在于,所述第二传动组件包括第一万向节和第二万向节,所述第一万向节连接于所述第二驱动件和所述第二万向节之间,所述第二万向节连接于所述第一万向节和所述运动执行件之间。
9.如权利要求8所述的机械臂,其特征在于,所述第二传动组件还包括调节块,所述调节块设置于所述第一万向节的一端,所述第二万向节的一端设有调节槽,所述调节块可滑动地嵌设于所述调节槽内,所述调节块与所述第二万向节止转连接。
10.一种机器人,其特征在于,包括:
技术总结
本申请涉及机器人技术领域,特别涉及一种机械臂及机器人。机械臂包括安装架、关节连接件、运动执行件、第一驱动机构以及第二驱动机构。关节连接件可转动地设置于安装架,运动执行件可转动地连接于关节连接件。第一驱动机构设置于安装架且传动连接于关节连接件,第一驱动机构用于驱使关节连接件带动运动执行件相对于安装架绕第一轴线转动。第二驱动机构设置于安装架且传动连接于运动执行件,第二驱动机构用于驱使运动执行件相对于安装架绕第二轴线转动,第二轴线与第一轴线相交。上述机械臂实现了在紧凑空间内的两自由度转动。
技术研发人员:张梦杰,周元清,程思雨,单耀俊,盛士行,黄广律
受保护的技术使用者:广州汽车集团股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!