一种超声电机、夹持机械手及其激励方法与流程
本技术涉及机械夹爪领域,具体而言,涉及一种超声电机、夹持机械手及其激励方法。
背景技术:
1、目前机械手在各个领域应用广泛,机械手的小型化、轻量化及多功能化是当前机械手领域的一个重要发展方向,如何实现机械手的小型化、轻量化及多功能化是当下工业界和学术界的一个研究热点。
2、在一些需要进行微操作的高精度加工工艺中,需要使用机械手进行夹持,而现有的机械手通过丝杆、轴承、齿轮等传动机构实现传动,导致整个夹持装置体积较大,不利于进行高精度加工工艺。
3、针对上述问题,目前尚未有有效的技术解决方案。
技术实现思路
1、本技术的目的在于提供一种超声电机、夹持机械手及其激励方法,旨在解决在高精度加工工艺中由于驱动装置体积较大而不利于高精度加工的问题。
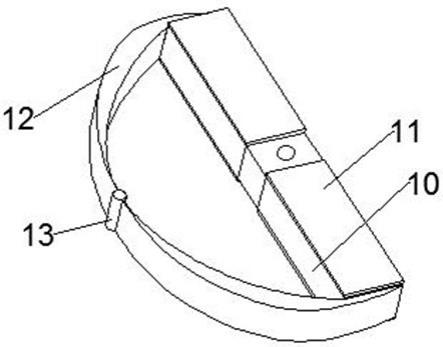
2、第一方面,本技术提供了一种超声电机,用于驱动夹持机械手中夹持手指的移动,包括两个弹性臂和柔性铰链,两个弹性臂通过各自的其中一端固定连接,两个弹性臂的另一端通过柔性铰链连接,且柔性铰链朝背离弹性臂的方向向外弯曲,每个弹性臂的上下表面均对称设置有压电片,同一弹性臂上的两个压电片背离弹性臂的表面上接入相同的交流电信号。
3、本技术提出的一种超声电机,通过压电效应,在弹性臂的上下表面设置压电片,将压电片连接电路的正极,并将电路的负极与弹性臂连接,使得在对电路施加具有特定变化的交流电信号时,使压电片产生振动从而使柔性铰链产生形变,从而可驱动夹持机械手上的两个夹持手指滑动以实现夹持和松开,本技术通过使用压电效应,无需通过丝杆、齿轮或轴承等体积较大的传动件即可驱动夹持机械手工作,减小了驱动装置的体积,且通过电路控制夹取的精度更高。
4、可选地,本技术提供的一种超声电机,柔性铰链的厚度由中间到两端递增。
5、本技术通过设置柔性铰链在中间的厚度最小,使该处的形变效果更明显,增大了柔性铰链的形变程度,从而进一步增加柔性铰链和夹取机械手之间的摩擦力,提高夹取机械手进行夹取的稳定性,防止打滑。
6、本技术提出的一种超声电机,通过压电效应,在弹性臂的上下表面设置压电片,将压电片连接电路的正极,并将电路的负极与弹性臂连接,使得在对电路施加具有特定变化的交流电信号时,使压电片产生振动从而使柔性铰链产生形变,从而可驱动夹持机械手上的两个夹持手指滑动以实现夹持和松开,本技术通过使用压电效应,无需通过丝杆、齿轮或轴承等体积较大的传动件,仅通过弹性臂、压电片以及柔性铰链即可驱动夹持机械手工作,减小了驱动装置的体积,且通过柔性铰链与夹持手指之间的摩擦力即可实现夹持自锁的功能,此外本技术通过电路控制夹取,使夹持机械手的夹持精度更高,响应更迅速,并可适用于更多的场景。
7、第二方面,本技术提供了一种夹持机械手,包括底座,夹持机械手还包括两个左右对称设置的超声电机、两组平行设置的滑动组件以及两个相对设置的夹持手指,两个超声电机固定安装在底座上,超声电机包括两个弹性臂和柔性铰链,两个弹性臂通过各自的其中一端固定连接,两个弹性臂的另一端通过柔性铰链连接,且柔性铰链朝背离弹性臂的方向向外弯曲,每个弹性臂的上下表面均对称设置有压电片,同一弹性臂上的两个压电片背离弹性臂的表面上接入相同的交流电信号,两组滑动组件分别滑动安装在两个超声电机的柔性铰链的外侧,两个夹持手指分别固定安装在两个滑动组件上,压电片用于根据输入的交流电信号的强弱产生振动以使柔性铰链发生形变而接触并拖动滑动组件滑动,进而带动固定在滑动组件上的夹持手指滑动,从而实现夹持机械手的夹持与松开。
8、本技术提出的夹持机械手,通过压电效应,在弹性臂的上下表面设置压电片,将压电片连接电路的正极,并将电路的负极与弹性臂连接,使得在对电路施加具有特定变化的交流电信号时,使压电片产生振动从而使柔性铰链产生形变,从而可驱动夹持机械手上的两个夹持手指滑动以实现夹持和松开,本技术通过使用压电效应,无需通过丝杆、齿轮或轴承等体积较大的传动件,仅通过弹性臂、压电片以及柔性铰链即可驱动夹持机械手工作,减小了驱动装置的体积,且通过柔性铰链与夹持手指之间的摩擦力即可实现夹持自锁的功能,此外本技术通过电路控制夹取,使夹持机械手的夹持精度更高,响应更迅速,并可适用于更多的场景。
9、可选地,本技术提供的一种夹持机械手,柔性铰链的中间设置有驱动足,且驱动足设置在背离弹性臂的方向。
10、本技术通过在柔性铰链的中间设置背离弹性臂的驱动足,使柔性铰链在发生形变时驱动足与滑动组件接触且应力集中在驱动足处,从而提高驱动足与滑动组件的摩擦力,防止驱动足与滑动组件之间打滑。
11、可选地,本技术提供的一种夹持机械手,滑动组件包括固定轨道和滑动块,固定轨道固定安装在底座上,滑动块设置在固定轨道和超声电机之间,夹持手指固定安装在滑动块上,滑动块与固定轨道滑动连接,压电片在接收不同大小的交流电信号时会产生对应强度的振动从而使柔性铰链产生形变而接触并拖动滑动块沿固定轨道滑动。
12、可选地,本技术提供的一种夹持机械手,滑动块上的一个侧面固定连接有摩擦片,在压电片接收不同大小的交流电信号时会产生对应强度的振动从而使柔性铰链产生形变,使柔性铰链接触摩擦片并拖动滑动块滑动。
13、本技术通过设置摩擦片,增大柔性铰链与滑动块之间的摩擦力,从而使超声电机驱动滑动组件更稳定滑动,防止打滑,进一步提高夹取稳定性。
14、本技术提出的夹持机械手,通过超声电机进行驱动,超声电机通过压电效应,在弹性臂的上下表面设置压电片,将压电片连接电路的正极,并将电路的负极与弹性臂连接,使得在对电路施加具有特定变化的交流电信号时,使压电片产生振动从而使柔性铰链产生形变,从而使柔性铰链与滑动组件接触并推动滑动组件滑动,从而带动固定在滑动组件上的夹持手指滑动从而实现夹持机械手的夹持与松开,本技术通过使用具有压电效应的超声电机,无需通过丝杆、齿轮或轴承等体积较大的传动件即可驱动夹持机械手工作,减小了夹持机械手的体积,且通过电路控制夹取机器人进行夹取的精度更高。
15、第三方面,本技术提供了一种夹持机械手的激励方法,用于控制夹持机械手进行夹持或松开的动作,夹持机械手包括两个左右对称设置的超声电机、两组平行设置的滑动组件以及两个相对设置的夹持手指,两个超声电机固定安装在底座上,超声电机包括两个弹性臂和柔性铰链,两个弹性臂通过各自的其中一端固定连接,两个弹性臂的另一端通过柔性铰链连接,且柔性铰链朝背离弹性臂的方向向外弯曲,每个弹性臂的上下表面均对称设置有压电片,同一弹性臂上的两个压电片背离弹性臂的表面上接入相同的交流电信号,同一个超声电机中的两个弹性臂设置为v型结构,使两个对称设置的超声电机中的四个弹性臂为x型结构,两组滑动组件分别滑动安装在两个超声电机的柔性铰链的外侧,两个夹持手指分别固定安装在两个滑动组件上,压电片用于根据输入的交流电信号的强弱产生振动以使柔性铰链发生形变而接触并拖动滑动组件滑动,进而带动固定在滑动组件上的夹持手指滑动,从而实现夹持机械手的夹持与松开;
16、夹持机械手的激励方法包括以下步骤:
17、s1、获取动作指令信息;
18、s2、根据动作指令信息对需要运动的夹持手指对应的超声电机上的压电片施加交流电信号,以使对应的滑动组件滑动而使夹持手指完成与动作指令信息相对应的动作,施加在需要运动的夹持手指对应的超声电机上的两个弹性臂上的压电片上的交流电信号为具有相位差的同频交流电信号。
19、本技术提出的一种夹持机械手的激励方法,通过向不同弹性臂上的压电片施加不同相位的交流电信号使柔性铰链产生对应轨迹的形变,从而驱动滑动组件滑动,从而使夹持手指随之滑动以实现夹持,且本技术还可针对不同物体调节向压电片施加不同大小的交流电信号中的参数,从而控制柔性铰链的形变程度从而使夹持更稳定。
20、可选地,本技术提供的一种夹持机械手的激励方法,步骤s2中,在两个对称设置的超声电机中,施加在相邻的两个弹性臂上的压电片上的同频交流电信号的相位不相等,施加在不相邻的弹性臂上的压电片上的同频交流电信号的相位相等。
21、本技术通过设置施加在相邻的两个弹性臂上的压电片所对应的电路的交流电信号的相位不相等,施加在不相邻的弹性臂上的压电片所对应的电路的交流电信号的相位相等使两个超声电机上的柔性铰链的形变相同从而驱动两组滑动组件以相同的速度滑动,带动滑动组件上的夹持手指同步滑动从而实现夹持机械手的双指夹持或双指松开。
22、可选地,本技术提供的一种夹持机械手的激励方法,步骤s2中,仅对其中一个超声电机的两个弹性臂上的压电片施加同频交流电信号,两个同频交流电信号的相位不相等。
23、本技术仅对其中一个超声电机中的两个弹性臂上的压电片施加相位不相同的同频交流电信号,驱动该超声电机对应连接的滑动组件滑动,带动该滑动组件上的夹持手指滑动从而实现夹持机械手的单指夹持或单指松开。
24、可选地,本技术提供的一种夹持机械手的激励方法,向同一超声电机中的两个弹性臂上的压电片施加的两个同频交流电信号的相位相差π/2。
25、本技术向同一超声电机中的两个弹性臂上的压电片施加的两个同频交流电信号的相位相差π/2,使超声电机中的柔性铰链的形变轨迹为正椭圆。
26、本技术提供的一种夹持机械手的激励方法,通过向不同弹性臂上的压电片施加不同相位的同频交流电信号使柔性铰链产生对应轨迹的形变,从而驱动滑动组件滑动,从而使夹持手指随之滑动以实现夹持,且本技术还可针对不同物体,向压电片施加不同大小的交流电信号控制柔性铰链的形变程度从而使夹持更稳定。
27、由上可知,本技术提供的一种超声电机、夹持机械手及其激励方法,其中超声电机通过压电效应,在弹性臂的上下表面设置压电片,将压电片连接电路的正极,并将电路的负极与弹性臂连接,使得在对电路施加具有特定变化的交流电信号时,使压电片产生振动从而使柔性铰链产生形变,从而可驱动夹持机械手上的两个夹持手指滑动以实现夹持和松开,本技术通过使用压电效应,无需通过丝杆、齿轮或轴承等体积较大的传动件,仅通过弹性臂、压电片以及柔性铰链即可驱动夹持机械手工作,减小了驱动装置的体积,且通过柔性铰链与夹持手指之间的摩擦力即可实现夹持自锁的功能,此外本技术通过电路控制夹取,使夹持机械手的夹持精度更高,响应更迅速,并可适用于更多的场景。
- 还没有人留言评论。精彩留言会获得点赞!