机器人的位姿控制方法、装置以及存储介质、电子设备与流程
本发明涉及位姿控制,具体涉及一种机器人的位姿控制方法、装置以及存储介质、电子设备。
背景技术:
1、相关技术中,基于机器人位姿纠偏的方式多采取传感器(激光、视觉、gnss、惯性传感器等)输入的方式获得机器人的实时位置,再根据理论设计的路线,计算路线偏差后进行姿态修正,目标是使机器人的实际运行轨迹贴近理论设计的路线,实现目标功能(例如指定区域的巡检、作业)。但当机器人本体运行出现偏差时(例如转弯、自旋动作)修正就较慢,对斜坡或不平整场景适应性较差。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的一个目的在于提出一种机器人的位姿控制方法,通过运动感知,以自学习的方式,在运动过程中进行纠偏,使机器人达到自身运动位姿智能化、柔性化、快速化控制的目的。
2、本发明的第二个目的在于提出一种位姿控制装置。
3、本发明的第三个目的在于提出一种计算机可读存储介质。
4、本发明的第四个目的在于提出一种电子设备。
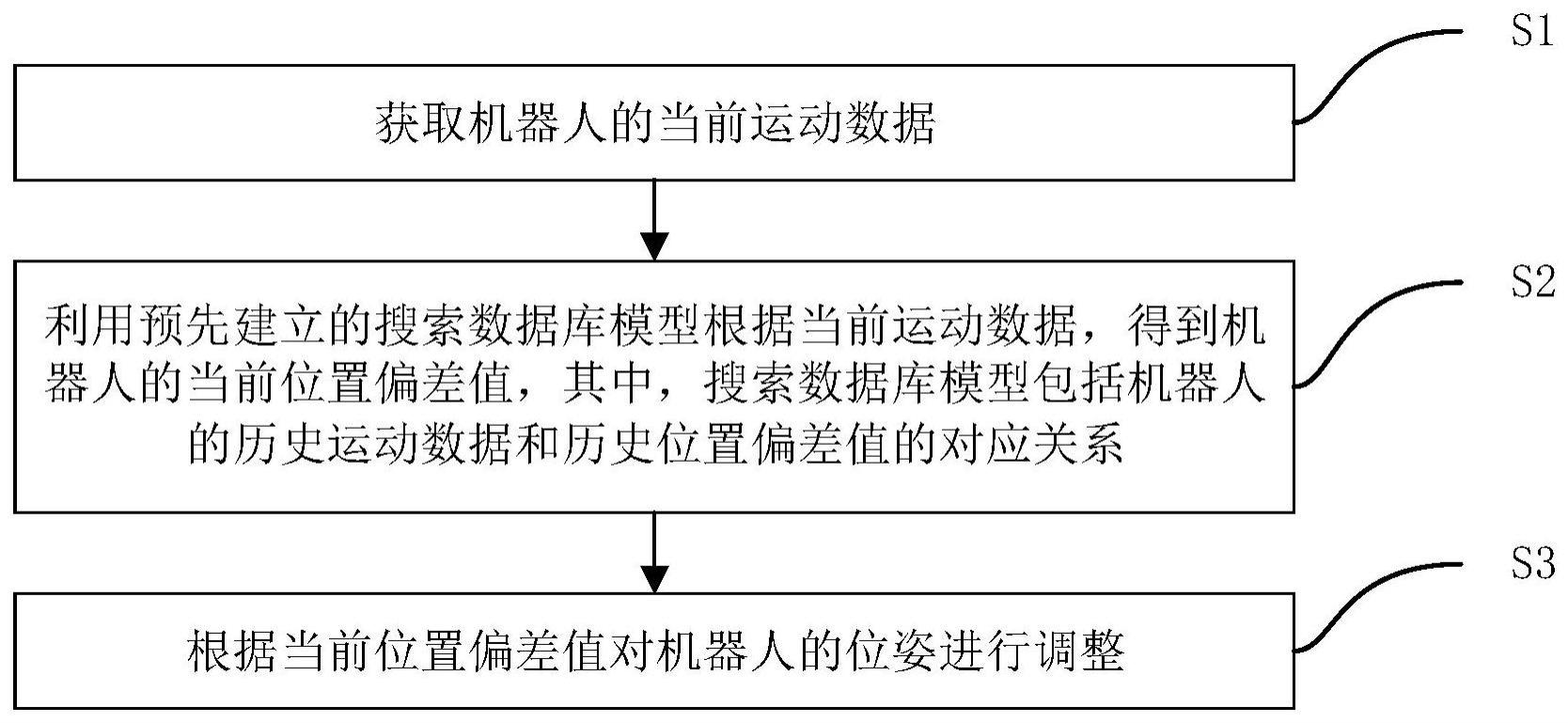
5、为达到上述目的,本发明第一方面实施例提出了一种机器人的位姿控制方法,所述方法包括:获取所述机器人的当前运动数据;利用预先建立的搜索数据库模型根据所述当前运动数据,得到所述机器人的当前位置偏差值,其中,所述搜索数据库模型包括所述机器人的历史运动数据和历史位置偏差值的对应关系;根据所述当前位置偏差值对所述机器人的位姿进行调整。
6、根据本发明实施例的机器人的位姿控制方法,利用机器人的动力机构反馈的历史运动数据对机器人的位姿进行调整,从感知角度直接分析学习机器人的运动,通过自学习提前预知机器人运行过程中受到何种力的情况下,会产生何种的运动趋势,以进行提前预判后进行细微的纠偏动作,使机器人达到自身运动位姿智能化、柔性化、快速化控制的目的。
7、另外,根据本发明上述实施例提出的机器人的位姿控制方法还可以具有如下附加的技术特征:
8、根据本发明的一个实施例,所述搜索数据库模型的建立过程,包括:获取结构体数据,其中,所述结构体数据包括预设数量的历史运动数据,以及各历史运动数据对应的采集时间和历史位置偏差值;对所述结构体数据进行去重处理,基于剩余的结构体数据建立所述搜索数据库模型;或者,对所述结构体数据进行分组处理,基于分组后的结构体数据建立所述搜索数据模型。
9、根据本发明的一个实施例,所述对所述结构体数据进行去重处理,包括:将历史运动数据及其对应的历史位置偏差值均重复的结构体数据进行去重处理;所述对所述结构体数据进行分组处理,包括:根据历史位置偏差值的取值大小对所述结构体数据进行分组处理。
10、根据本发明的一个实施例,所述利用预先建立的搜索数据库模型根据所述当前运动数据,得到所述机器人的当前位置偏差值,包括:当利用预先建立的搜索数据库模型根据所述当前运动数据,得到一个位置偏差值时,将该位置偏差值作为所述当前位置偏差值;当利用预先建立的搜索数据库模型根据所述当前运动数据,得到多个位置偏差值时,根据该多个位置偏差值和所述机器人的当前位姿数据得到所述当前位置偏差值。
11、根据本发明的一个实施例,所述根据该多个位置偏差值和所述机器人的当前位姿数据得到所述当前位置偏差值,包括:根据所述当前位姿数据得到所述机器人的当前路线;根据所述当前路线与理论路线,确定所述机器人的车头朝向;利用预先建立的搜索数据库模型中位置偏差值与车头朝向的关系,根据多个所述位置偏差值和所述车头朝向,确定所述当前位置偏差值。
12、根据本发明的一个实施例,所述利用预先建立的搜索数据库模型根据所述当前运动数据,得到所述机器人的当前位置偏差值,包括:当所述搜索数据库模型中不存在与所述当前运动数据相同的历史运动数据时,基于所述搜索数据库模型分别从小于所述当前运动数据的历史运动数据和大于所述当前运动数据的历史运动数据中,确定出与所述当前运动数据最接近的历史运动数据,记为第一历史运动数据和第二历史运动数据;根据所述第一历史运动数据对应的第一历史位置偏差值和所述第二历史运动数据对应的第二历史位置偏差值,得到所述当前位置偏差值。
13、根据本发明的一个实施例,所述根据所述当前位置偏差值对所述机器人的位姿进行调整,包括:根据所述当前位置偏差值,建立虚拟目标坐标点;根据所述虚拟目标坐标点和理论定位点,得到期望线速度和期望角速度;利用所述机器人的运动模型根据所述期望线速度和所述期望角速度,得到所述机器人电机的期望转速;控制所述电机按照所述期望转速运行。
14、根据本发明的一个实施例,所述运动数据包括压力数据、加速度数据中的至少一者。
15、为达到上述目的,本发明第二方面实施例提出了一种机器人的位姿控制装置,所述装置包括:获取模块,用于获取所述机器人的当前运动数据;搜索模块,用于利用预先建立的搜索数据库模型根据所述当前运动数据,得到所述机器人的当前位置偏差值,其中,所述搜索数据库模型包括所述机器人的历史运动数据和历史位置偏差值的对应关系;控制模块,用于根据所述当前位置偏差值对所述机器人的位姿进行调整。
16、为达到上述目的,本发明第三方面实施例提出了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实现如权利要求1-7中任一项所述的机器人的位姿控制方法。
17、为达到上述目的,本发明第四方面实施例提出了一种电子设备,包括存储器、处理器,所述存储器上存储有计算机程序,所述计算机程序被所述处理器执行时,实现如本发明第一方面实施例提出的机器人的位姿控制方法。
18、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种机器人的位姿控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的机器人的位姿控制方法,其特征在于,所述搜索数据库模型的建立过程,包括:
3.根据权利要求2所述的机器人的位姿控制方法,其特征在于,所述对所述结构体数据进行去重处理,包括:将历史运动数据及其对应的历史位置偏差值均重复的结构体数据进行去重处理;
4.根据权利要求1所述的机器人的位姿控制方法,其特征在于,所述利用预先建立的搜索数据库模型根据所述当前运动数据,得到所述机器人的当前位置偏差值,包括:
5.根据权利要求4所述的位姿控制方法,其特征在于,所述根据该多个位置偏差值和所述机器人的当前位姿数据得到所述当前位置偏差值,包括:
6.根据权利要求4所述的位姿控制方法,其特征在于,所述利用预先建立的搜索数据库模型根据所述当前运动数据,得到所述机器人的当前位置偏差值,包括:
7.根据权利要求1所述的机器人的位姿控制方法,其特征在于,所述根据所述当前位置偏差值对所述机器人的位姿进行调整,包括:
8.根据权利要求1所述的位姿控制方法,其特征在于,所述运动数据包括压力数据、加速度数据中的至少一者。
9.一种机器人的位姿控制装置,其特征在于,所述装置包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现如权利要求1-8中任一项所述机器人的位姿控制方法。
11.一种电子设备,包括存储器、处理器,所述存储器上存储有计算机程序,其特征在于,所述计算机程序被所述处理器执行时,实现如权利要求1-8中任一项所述机器人的位姿控制方法。
技术总结
本发明公开了一种机器人的位姿控制方法、装置以及存储介质、电子设备,方法包括:获取机器人的当前运动数据;利用预先建立的搜索数据库模型根据当前运动数据,得到机器人的当前位置偏差值,其中,搜索数据库模型包括机器人的历史运动数据和历史位置偏差值的对应关系;根据当前位置偏差值对机器人的位姿进行调整。该方法利用机器人的动力机构反馈的历史运动数据对机器人的位姿进行调整,从感知角度直接分析学习机器人的运动,通过自学习提前预知机器人运行过程中受到何种力的情况下,会产生何种的运动趋势,以进行提前预判后进行细微的纠偏动作,使机器人达到自身运动位姿智能化、柔性化、快速化控制的目的。
技术研发人员:周渤,王伟,赵雪松,廖丹莉,张佳
受保护的技术使用者:仁洁智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!