任务执行控制方法及机器人与流程
本申请涉及人工智能领域,尤其涉及任务执行控制方法及机器人。
背景技术:
1、随着社会的发展,人工智能机器人技术得到了飞速的发展,机器人广泛应用在各行各业中。在利用机器人工作减轻人力负担时,用户可以向机器人指示多个任务,由机器人完成该多个任务的执行工作。
2、在实际使用中,各任务的性质类型不同,有些需要立即执行,有些可延后执行。现有技术中,通常按照任务提交的时间执行任务,这样会延误执行某些重要任务,导致机器人执行任务的效率低下并且任务的执行过程非常不智能。
技术实现思路
1、为解决上述技术问题,本申请提供一种任务执行控制方法及机器人,能够根据待执行任务的类型对多个待执行任务进行排序,并按照排序来执行待执行任务,从而能够避免某些重要任务不能及时执行,并提高了任务执行的效率,使得任务执行过程非常智能。
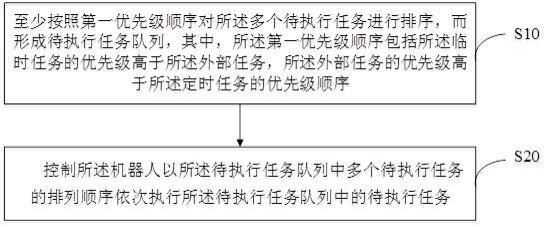
2、本申请第一方面提供一种任务执行控制方法,所述机器人内创建有多个待执行任务,所述多个待执行任务包括临时任务、外部任务及定时任务中的至少两种,所述任务执行控制方法包括:至少按照第一优先级顺序对所述多个待执行任务进行排序,而形成待执行任务队列,其中,所述第一优先级顺序包括所述临时任务的优先级高于所述外部任务,所述外部任务的优先级高于所述定时任务的优先级顺序;以及控制所述机器人以所述待执行任务队列中多个待执行任务的排列顺序依次执行所述待执行任务队列中的待执行任务。
3、本申请第二方面提供一种机器人,所述机器人包括存储器和处理器,所述存储器内存储有至少一条指令,所述至少一条指令供所述处理器调用后执行,以实现前述的任务执行控制方法。
4、本申请提供的任务执行控制方法及机器人,通过对多个待执行任务中的定时任务、外部任务及临时任务根据优先级排序进行排序得到待执行任务队列,再根据待执行任务队列的排列顺序执行待执行任务,能够提高机器人的任务执行效率。并且,可支持紧急任务随时执行,且保证其他任务能顺利执行,便于用户处理紧急任务,使得任务执行的过程非常智能。
技术特征:
1.一种任务执行控制方法,应用于机器人,其特征在于,所述机器人内创建有多个待执行任务,所述多个待执行任务包括临时任务、外部任务及定时任务中的至少两种,所述任务执行控制方法包括:
2.根据权利要求1所述的任务执行控制方法,其特征在于,所述多个待执行任务包括定时任务,还包括临时任务和/或外部任务,在所述至少按照第一优先级顺序对所述多个待执行任务进行排序之前,所述方法还包括:
3.根据权利要求2所述的任务执行控制方法,其特征在于,在所述定时任务的执行时间非当前时刻时,所述至少按照第一优先级顺序对所述多个待执行任务进行排序,而形成待执行任务队列,包括:
4.根据权利要求1所述的任务执行控制方法,其特征在于,所述多个待执行任务包括定时任务,还包括临时任务和/或外部任务,所述方法还包括:
5.根据权利要求1所述的任务执行控制方法,其特征在于,所述方法还包括:
6.根据权利要求1所述的任务执行控制方法,其特征在于,所述方法还包括:
7.根据权利要求6所述的任务执行控制方法,其特征在于,所述响应对机器人的输入操作而创建新的待执行任务,包括:
8.根据权利要求6所述的任务执行控制方法,其特征在于,所述响应对机器人的输入操作而创建新的待执行任务,包括:
9.根据权利要求1所述的任务执行控制方法,其特征在于,所述多个待执行任务包括多个所述临时任务和/或多个所述外部任务,所述至少按照第一优先级顺序对所述多个待执行任务进行排序,而形成待执行任务队列,包括:
10.根据权利要求2所述的任务执行控制方法,其特征在于,在所述多个待执行任务包括多个所述定时任务,且多个所述定时任务的执行时间均为当前时刻时,所述至少按照第一优先级顺序对所述多个待执行任务进行排序,包括:
11.一种机器人,其特征在于,所述机器人包括存储器和处理器,所述存储器内存储有至少一条指令,所述至少一条指令供所述处理器调用后执行,以实现如权利要求1-10任一项所述的任务执行控制方法。
12.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质内存储有计算机程序,所述计算机程序供处理器调用后执行,以实现如权利要求1-10任一项所述的任务执行控制方法。
技术总结
本申请提供一种任务执行控制方法及机器人。该方法应用于创建有多个待执行任务的机器人,多个待执行任务包括临时任务、外部任务及定时任务中的至少两种,该方法包括:至少按照第一优先级顺序对多个待执行任务进行排序,而形成待执行任务队列,其中,第一优先级顺序包括临时任务的优先级高于外部任务,外部任务的优先级高于定时任务的优先级顺序;以及控制机器人以待执行任务队列中多个待执行任务的排列顺序依次执行待执行任务队列中的待执行任务。本申请提供的任务执行控制方法,能够根据待执行任务的类型对多个待执行任务进行排序,并按照排序执行待执行任务,能够避免某些重要任务不能及时执行,并提高了任务执行的效率。
技术研发人员:张殿旋,周邓金,朱馨
受保护的技术使用者:深圳市欧拉智造科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!