一种基于深度学习的智能机器人控制方法
本发明涉及智能机器人,特别是涉及一种基于深度学习的智能机器人控制方法。
背景技术:
1、智能机器人之所以叫智能机器人,这是因为它有相当发达的“大脑”,在脑中起作用的是中央处理器,这种计算机跟操作它的人有直接的联系,最主要的是,这样的计算机可以进行按目的安排的动作。
2、现有的智能机器人与人类之间的交互方式单一且互动性差,这是由于遥控操作功能有限,即机器人按照提前设定好的程序进行动作,也是存在无法完成设定程序以外的其它动作,不能针对不同用户需求进行不同的运动,此外,机器人的运动方式完全是被动的,即:智能按照遥控操作或者设定程序进行动作,因此,在使用机器人时,需要使用者使用大量的操作,因此易导致其无法精确把握在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等数据,导致机器人的作业性能较差。
技术实现思路
1、为了克服现有技术的不足,本发明提供一种基于深度学习的智能机器人控制方法。
2、为解决上述技术问题,本发明提供如下技术方案:一种基于深度学习的智能机器人控制方法,包括以下步骤:
3、s1:开放性模块化控制体系方法;
4、s2:层次化控制体系方法;
5、s3:故障诊断安全维护方法。
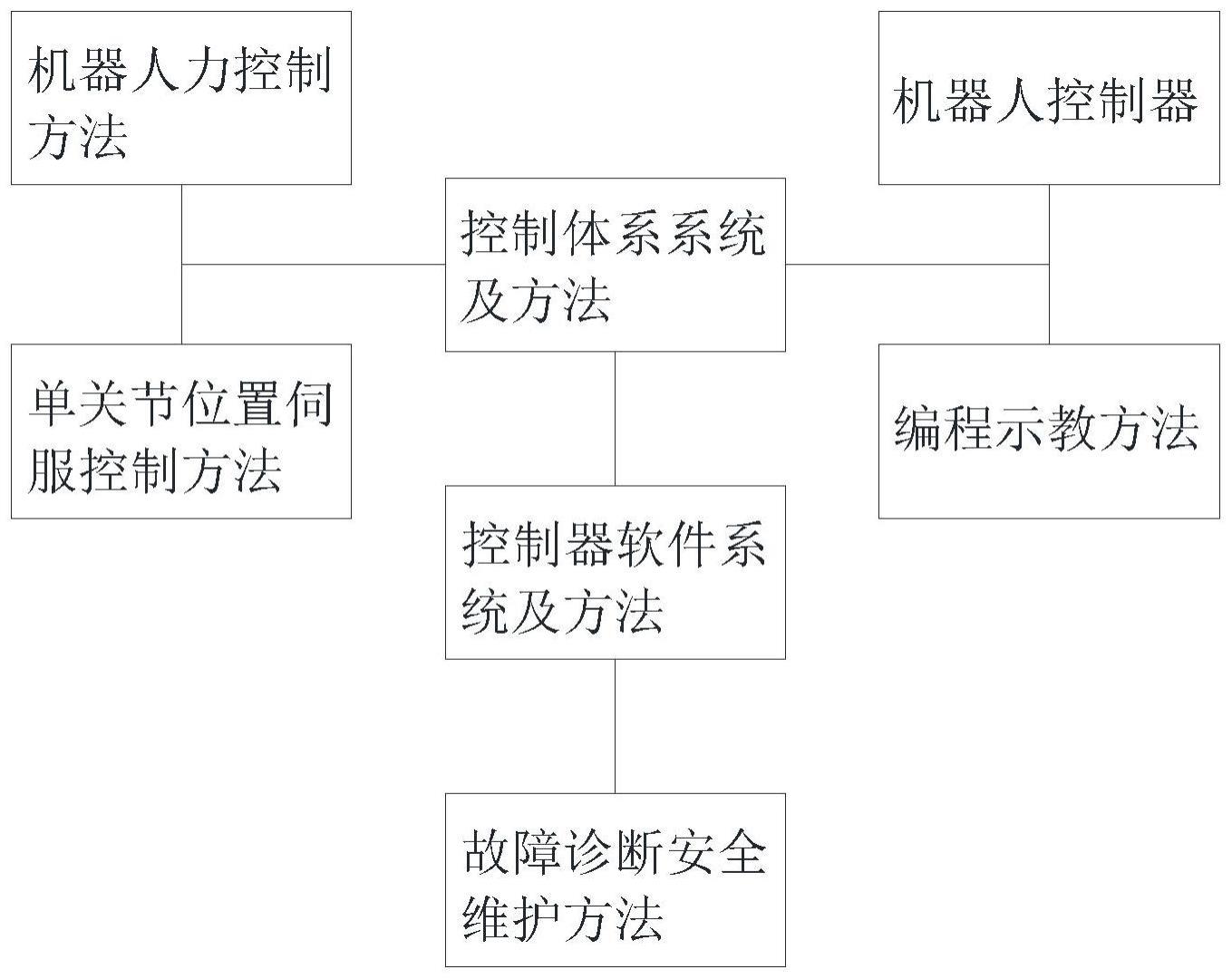
6、作为本发明的一种优选技术方案,所述s1开放性模块化控制体系方法包括机器人控制器和编程示教方法,所述机器人控制器和编程示教盒通过串口/can总线进行通讯。
7、作为本发明的一种优选技术方案,所述机器人控制器的主计算机完成机器人的运动规划、插补和位置伺服以及主控逻辑、数字i/o、传感器处理等功能,而编程示教盒完成信息的显示和按键的输入,机器人控制器分为比例控制、积分控制和微分控制,其中比例控制是一种最简单的控制方式,其控制器的输出与输入误差信号成比例关系,当仅有比例控制时系统输出存在稳态误差;而在积分控制中,控制器的输出与输入误差信号的积分成正比关系,对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统,为了消除稳态误差,在控制器中必须引入积分项,积分项对误差取决于时间的积分,随着时间的增加,积分项会增大,这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零,因此,比例+积分(pi)控制器,可以使系统在进入稳态后无稳态误差,积分控制的特点是:只要还有余差(即残余的控制偏差)存在,积分控制就按部就班地逐渐增加控制作用,直到余差消失;因此比例控制的反应快,稳定性好,是最基本的控制作用,是“皮”,积分、微分控制是对比例控制起增强作用的,极少单独使用,所以是”毛”,在实际使用中比例和积分一般一起使用,比例承担主要的控制作用,积分帮助消除余差;在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系,自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳,其原因是由于存在有较大惯性环节或有滞后组件,具有抑制误差的作用,其变化总是落后于误差的变化,解决的办法是使抑制误差的作用的变化超前,即在误差接近零时,抑制误差的作用就应该是零,这就是说,在控制器中仅引入比例项往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是微分项,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调,所以对有较大惯性或滞后的被控对象,比例+微分(pd)控制器能改善系统在调节过程中的动态特性,微分控制的特点是:尽管实际测量值还比设定值低,但其快速上扬的冲势需要及早加以抑制,作为基本控制使用,微分控制只看趋势,不看具体数值所在。
8、作为本发明的一种优选技术方案,所述s1开放性模块化控制体系方法还包括机器人力控制方法和单关节位置伺服控制方法,所述机器人力控制主要用于完成装配、抓放物体等工作时保持适度的力或力矩,所述机器人力控制利用接近、滑动等传感功能进行自适应式控制。
9、作为本发明的一种优选技术方案,所述单关节位置伺服控制方法分为上位机和下位机,其中上位机作运动规划,并将手部的运动转化成各关节的运动,按控制周期传给下位机。
10、作为本发明的一种优选技术方案,所述下位机进行运动的插补运算及对关节进行伺服控制,常用多轴运动控制器作为机器人的关节控制器。
11、作为本发明的一种优选技术方案,所述s2层次化控制体系方法建立在基于开源的实时多任务操作系统上,采用分层和模块化结构设计,以实现软件系统的开放性。
12、作为本发明的一种优选技术方案,所述s2层次化控制体系方法分为三个层次:硬件驱动层、核心层和应用层。
13、作为本发明的一种优选技术方案,所述硬件驱动层、核心层和应用层分别面对不同的功能需求,对应不同层次的开发,系统中各个层次内部由若干个功能相对对立的模块组成,这些功能模块相互协作共同实现该层次所提供的功能。
14、作为本发明的一种优选技术方案,所述s3故障诊断安全维护方法通过各种信息,对机器人故障进行诊断,并进行相应维护,是保证机器人安全性的关键技术。
15、与现有技术相比,本发明能达到的有益效果是:
16、通过将开放性模块化控制体系设计为采用分布式cpu计算机结构,分为机器人控制器(rc),运动控制器(mc),光电隔离i/o控制板、传感器处理板和编程示教盒的结构,使得机器人控制技术可精确把握在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等数据,具有编程简单、软件菜单操作便捷、在线操作提示和使用方便等特点,此外智能机器人的运动完全是基于传感器中视觉和听觉的反馈方式实现,具有拟人的自主运动的意识,易于用户操作,同时更加全面地体现智能机器人的智能性,提升用户的使用体验。
技术特征:
1.一种基于深度学习的智能机器人控制方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种基于深度学习的智能机器人控制方法,其特征在于,所述s1开放性模块化控制体系方法包括机器人控制器和编程示教方法,所述机器人控制器和编程示教盒通过串口/can总线进行通讯。
3.根据权利要求2所述的一种基于深度学习的智能机器人控制方法,其特征在于,所述机器人控制器的主计算机完成机器人的运动规划、插补和位置伺服以及主控逻辑、数字i/o、传感器处理等功能,而编程示教盒完成信息的显示和按键的输入。
4.根据权利要求1所述的一种基于深度学习的智能机器人控制方法,其特征在于,所述s1开放性模块化控制体系方法还包括机器人力控制方法和单关节位置伺服控制方法,所述机器人力控制主要用于完成装配、抓放物体等工作时保持适度的力或力矩,所述机器人力控制利用接近、滑动等传感功能进行自适应式控制。
5.根据权利要求4所述的一种基于深度学习的智能机器人控制方法,其特征在于,所述单关节位置伺服控制方法分为上位机和下位机,其中上位机作运动规划,并将手部的运动转化成各关节的运动,按控制周期传给下位机。
6.根据权利要求5所述的一种基于深度学习的智能机器人控制方法,其特征在于,所述下位机进行运动的插补运算及对关节进行伺服控制,常用多轴运动控制器作为机器人的关节控制器。
7.根据权利要求1所述的一种基于深度学习的智能机器人控制方法,其特征在于,所述s2层次化控制体系方法建立在基于开源的实时多任务操作系统上,采用分层和模块化结构设计,以实现软件系统的开放性。
8.根据权利要求1所述的一种基于深度学习的智能机器人控制方法,其特征在于,所述s2层次化控制体系方法分为三个层次:硬件驱动层、核心层和应用层。
9.根据权利要求8所述的一种基于深度学习的智能机器人控制方法,其特征在于,所述硬件驱动层、核心层和应用层分别面对不同的功能需求,对应不同层次的开发,系统中各个层次内部由若干个功能相对对立的模块组成,这些功能模块相互协作共同实现该层次所提供的功能。
10.根据权利要求1所述的一种基于深度学习的智能机器人控制方法,其特征在于,所述s3故障诊断安全维护方法通过各种信息,对机器人故障进行诊断,并进行相应维护,是保证机器人安全性的关键技术。
技术总结
本发明涉及智能机器人技术领域,特别是涉及一种基于深度学习的智能机器人控制方法,包括S1:开放性模块化控制体系方法、S2:层次化控制体系方法、S3:故障诊断安全维护方法、S1开放性模块化控制体系方法包括机器人控制器和编程示教方法,开放性模块化控制体系方法采用分布式CPU计算机结构,机器人控制器的主计算机完成机器人的运动规划、插补和位置伺服以及主控逻辑、数字I/O、传感器处理等功能,而编程示教盒完成信息的显示和按键的输入,使得机器人控制技术可精确把握在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等数据,具有编程简单、软件菜单操作便捷、在线操作提示和使用方便等特点。
技术研发人员:郭海峰,贾文灿,吴文新
受保护的技术使用者:清华大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!