基于关节位置伺服的机器人足地交互力控制方法及系统与流程
本发明属于机器人,尤其涉及一种基于关节位置伺服的机器人足地交互力控制方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、双足机器人通过足与地面交互实现本体的运动,其运动基坐标随着机器人的运动而实时改变方位,因此被称为浮动基坐标系统。与常见的固定基坐标系统(如定基座机械臂)相比,浮动基坐标系统的运动不仅取决于自身关节构型的变化,还依赖于与环境的交互力大小。因此,感知浮动基坐标系统所受到的外界交互力并对该交互力进行主动调整,是实现高性能双足机器人运动的基础。
3、点足式双足机器人每只足与地面的交互力均可分解为3个维度:水平前向力、水平侧向力和垂直力。传统的足地交互力感知方法大部分依赖足部的三维力传感器测量,或者基于关节的扭矩反馈进行推算;而交互力大小的调整则通过对关节的精确力伺服实现。上述方法大多数要求机器人驱动器具有较高的控制和响应频率(通常不小于1khz),驱动传动比较小或须具备精准的力感知元件,对加工精度和硬件电路均有较高的要求。与之相比,采用位置伺服的关节驱动器更加成熟、低成本,位置伺服技术也相对简单,对于直流电机来说,其转角或转速调整可通过改变其驱动电压占空比实现。此外,同等体积重量的位置伺服驱动器通常比力伺服驱动器负载能力要强。但是,由于位置伺服的运动刚度较高且难以精确获取输出力的大小,力传感和关节扭矩伺服能力的缺失使得现有足地交互力感知与控制方法无法在机器人上实现。
技术实现思路
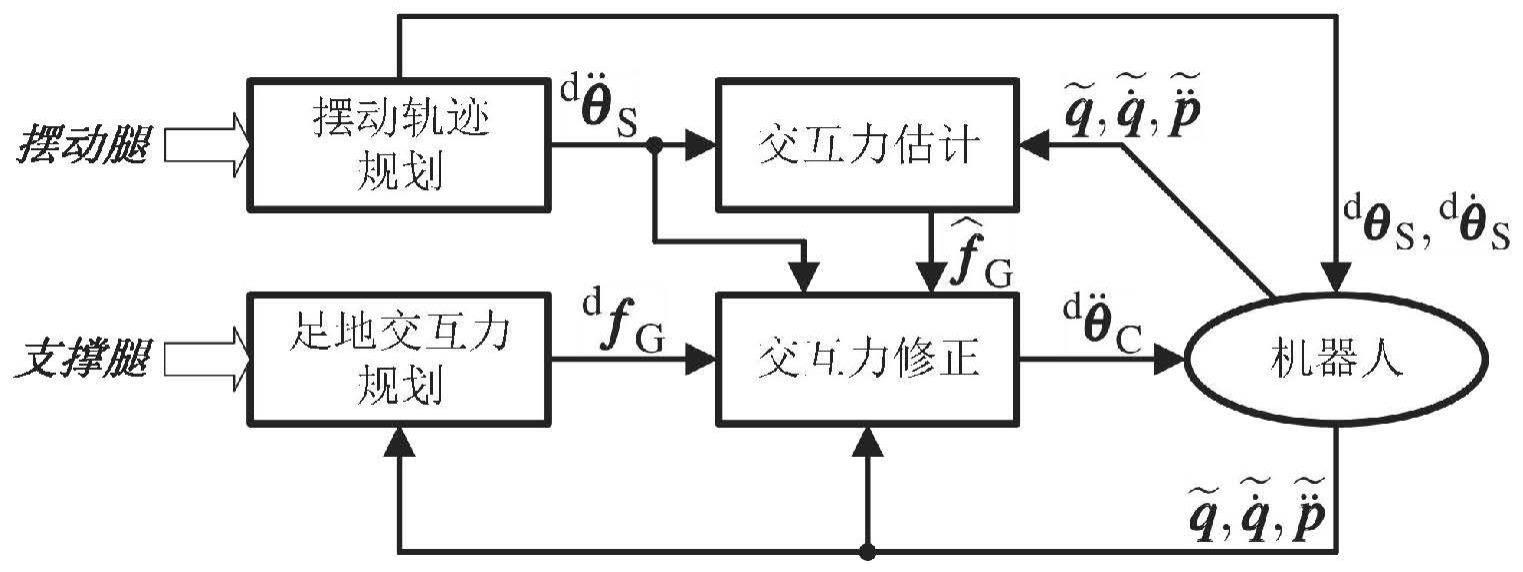
1、为克服上述现有技术的不足,本发明提供一种基于关节位置伺服的机器人足地交互力控制及系统,基于机器人关节构型和躯干位姿的反馈值对机器人与环境之间的整体交互力进行估计,然后通过迭代控制机器人关节角速度实现对整体交互力的主动调整。该算法和系统无需关节角加速度和躯干位置的反馈值,其所需的反馈参数均为位置控制腿足式机器人常用传感变量。
2、为实现上述目的,本发明的第一个方面提供一种基于关节位置伺服的机器人足地交互力控制方法,包括:
3、基于关节扭矩作用在机器人上的虚拟力,以及机器人与外界交互时的关节空间动力学模型得到机器人运动与机器人-外界交互所产生的交互力关系模型;
4、基于所述交互力关系模型,根据机器人所处的单足支撑相或双足支撑相状态求解机器人-外界交互的整体交互力估计值;
5、采用机器人关节角加速度修正机器人-外界交互的整体交互力估计值,使其跟随机器人系统的期望的整体交互力。
6、本发明的第二个方面提供一种基于关节位置伺服的机器人足地交互力控制系统,包括:
7、动力学模型建立模块:基于人形机器人、目标物体、环境之间两两交互的位姿信息建立系统交互力模型,根据所建立的系统交互力模型分别建立人形机器人、目标物体的动力学模型;
8、约束建立模块:基于人形机器人、目标物体、环境之间两两交互所满足的速度、力的约束条件建立系统速度约束模型和系统力约束模型,根据所建立的系统速度约束模型、系统力约束模型以及所述人形机器人、目标物体的动力学模型得到机器人关节角加速度约束条件;
9、运动执行模块:基于所建立的机器人关节角加速度约束条件得到系统运动边界条件,人形机器人的运动轨迹在满足系统运动边界条件的情况下,执行非抓取式移动作业任务。
10、本发明的第三个方面提供一种计算机设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当计算机设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行一种人形机器人非抓取式移动推运任务控制方法。
11、本发明的第四个方面提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器运行时执行一种人形机器人非抓取式移动推运任务控制方法。
12、以上一个或多个技术方案存在以下有益效果:
13、在本发明中,基于位置伺服的关节驱动器,通过构建机器人运动与机器人-外界交互所产生的交互力关系模型,基于逆动力学算法及机器人的运动学反馈信息得到机器人与环境间交互力的估计值,然后采用机器人关节角加速度修正机器人与环境间交互力的估计值,使交互力的大小能够跟随系统的给定值。该方法对机器人硬件平台要求较低,不需要昂贵的交互力传感器和关节扭矩传感器,也无需技术难度较大的关节扭矩伺服技术,降低了机器人足地交互力感知与估计的实现成本。
14、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种基于关节位置伺服的机器人足地交互力控制方法,其特征在于,包括:
2.如权利要求1所述的一种基于关节位置伺服的机器人足地交互力控制方法,其特征在于,基于机器人动力学方程推导得到关节扭矩作用在机器人上的虚拟力方程。
3.如权利要求2所述的一种基于关节位置伺服的机器人足地交互力控制方法,其特征在于,根据所述虚拟力方程与机器人系统的二阶运动学方程联立求解关节扭矩作用在机器人上的虚拟力,将所求解的虚拟力代入到所述虚拟力方程中消除虚拟力方程中的关节扭矩变量,并结合所述关节空间动力学模型得到机器人运动与机器人-外界交互所产生的交互力关系模型。
4.如权利要求1所述的一种基于关节位置伺服的机器人足地交互力控制方法,其特征在于,基于机器人关节角度、躯干姿态角度和角速度、躯干线速度和线加速度的反馈值对机器人与地面的整体交互力进行估计。
5.如权利要求1所述的一种基于关节位置伺服的机器人足地交互力控制方法,其特征在于,采用迭代的方式,使机器人-外界交互的交互力估计值跟随机器人系统的期望的整体交互力,其中,机器人系统期望的整体交互力通过设定机器人交互肢的关节角加速度确定。
6.如权利要求5所述的一种基于关节位置伺服的机器人足地交互力控制方法,其特征在于,采用设定机器人关节角度的方式对机器人交互肢的关节角加速度进行间接的设定,具体为:
7.一种基于关节位置伺服的机器人足地交互力控制系统,其特征在于,包括:
8.如权利要求7所述的一种基于关节位置伺服的机器人足地交互力控制系统,其特征在于,在所述整体交互力估计值计算模块中,基于机器人关节角度、躯干姿态角度和角速度、躯干线速度和线加速度的反馈值对机器人与地面的整体交互力进行估计。
9.一种计算机设备,其特征在于,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当计算机设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行如权利要求1至6任一项所述的一种基于关节位置伺服的机器人足地交互力控制方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器运行时执行如权利要求1至6任一项所述的一种基于关节位置伺服的机器人足地交互力控制方法。
技术总结
本发明提出了一种基于关节位置伺服的机器人足地交互力控制方法,包括:基于关节扭矩作用在机器人上的虚拟力,以及机器人与外界交互时的关节空间动力学模型得到机器人运动与机器人‑外界交互所产生的交互力关系模型;基于所述交互力关系模型,根据机器人所处的单足支撑相或双足支撑相状态求解机器人‑外界交互的整体交互力估计值;采用机器人关节角加速度修正机器人‑外界交互的整体交互力估计值,使其跟随机器人系统的期望的整体交互力。不需要昂贵的交互力传感器和关节扭矩传感器,也无需技术难度较大的关节扭矩伺服技术,降低了机器人足地交互力感知与估计的实现成本。
技术研发人员:张国腾,荣学文,宋锐,李贻斌,孔令雨
受保护的技术使用者:之江实验室
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!