一种兼具柔性传感和变刚度特性的软体机械手
本发明涉及软体机械手,具体涉及一种兼具柔性传感和变刚度特性的软体机械手。
背景技术:
1、机械手也称为末端执行器,是机器人的重要组成部件。现有的机械手主要包括刚性机械手和软体机械手。其中刚性机械手输出力大,精度相对较高,且易于控制,但是缺乏环境适应性和交互安全性。而软体机械手主要是由柔软的材料组成,其拥有更多的自由度和灵活性,具有良好的顺应性和复杂的环境适应能力。与传统刚性机械手相比,软体机器手在人机交互、复杂易碎物品抓取和狭小的空间作业方面具有不可比拟的优势,因此软体机械手具有广阔的应用前景。
2、刚性机械手虽然力度大、精度高,但是难以胜任抓取易碎物品;而软体机械手虽然具有良好的柔顺性和灵活性,但同时也存在着抓持力小,刚度差,负载低的缺点。当面对质量较大且形状不规则的物体时,现有的软体机械手就显得无能为力。而且现有的软体机械手由于其材料固有的柔顺性并且存在较大变形,所以很难嵌入传感器来感知外部环境变化。
技术实现思路
1、本发明的目的是提供一种兼具柔性传感和变刚度特性的软体机械手,以解决刚性机械手难以胜任抓取易碎物品的任务,而软体机械手抓持力小,刚度差,负载低,且软体机械手很难嵌入传感器来感知外部环境变化的技术问题。
2、为了达到上述目的,本发明提供了
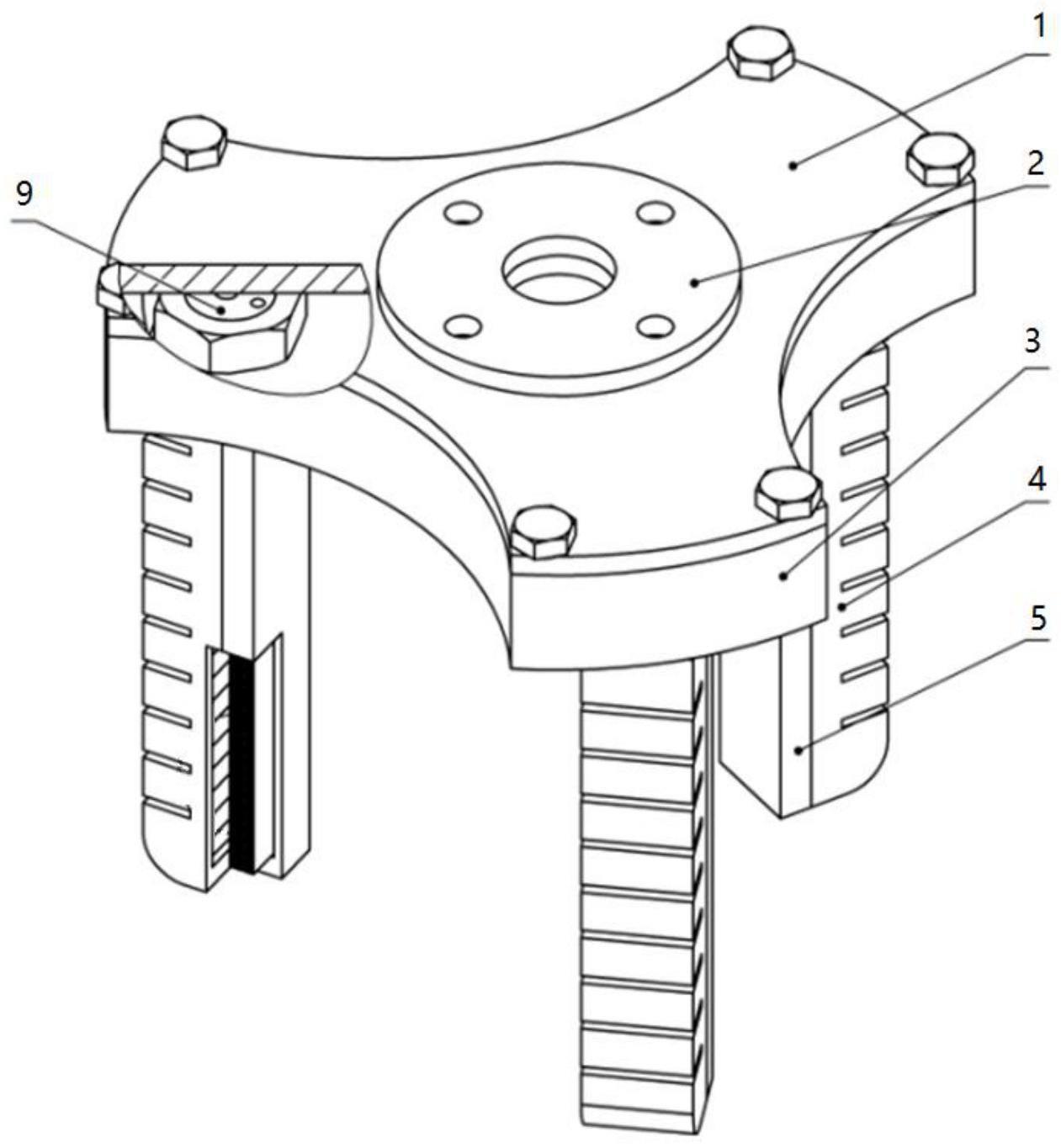
3、一种兼具柔性传感和变刚度特性的软体机械手,其特殊之处在于:包括用于连接外部机械臂的安装基座和均匀分布在安装基座同一侧的n个手指,n为大于或等于1的正整数;
4、所述安装基座上设有n个气管接头,所述气管接头上设有用于连接正压气源的正压气孔和用于连接负压气源的负压气孔;n个所述手指与n个气管接头一一对应;
5、所述手指包括均为长条状且连接在一起的软腔体和变刚度腔体;所述软腔体与正压气孔连通;所述变刚度腔体与负压气孔连通;
6、所述软腔体与变刚度腔体连接的一侧为平面状,远离变刚度腔体的一侧为锯齿状或波纹状,且所述锯齿或波纹沿软腔体的长度方向设置;
7、所述变刚度腔体内设有多层相互堆叠设置的干扰层,其中一对相邻的两干扰层之间设置有柔性传感层;所述柔性传感层与外部控制板电连接。
8、进一步地,所述柔性传感层为压电聚偏二氟乙烯薄膜。
9、进一步地,所述柔性传感层与相邻的其中一个干扰层之间还设置有微结构层;
10、所述微结构层粘附在柔性传感层上,所述微结构层靠近柔性传感层的一侧上设置有多个凸起。
11、进一步地,多层所述干扰层分为两组,分别为多层第一干扰层和多层第二干扰层;所述第一干扰层一端与变刚度腔体内靠近安装基座的一端连接;所述第二干扰层一端与变刚度腔体内远离安装基座的一端连接;多层所述第一干扰层的另一端和多层第二干扰层(的另一端在变刚度腔体中部相互交错堆叠设置;
12、所述第一干扰层和第二干扰层所在面与软腔体与变刚度腔体的连接平面平行;
13、所述柔性传感层设置在变刚度腔体中部,且位于其中一层第一干扰层以及与之相邻的第二干扰层之间。
14、进一步地,在所述变刚度腔体内,靠近安装基座的一端设有第一安装座,远离安装基座的一端设有第二安装座;
15、所述第一安装座上沿远离软腔体的方向并排设置有多个第一层阻塞,每相邻两个第一层阻塞之间设置有一层第一干扰层;
16、所述第二安装座上沿远离软腔体的方向并排设置有多个第二层阻塞,每相邻两个第二层阻塞之间设置有一层第二干扰层。
17、进一步地,所述第一干扰层和第二干扰层均为纤维玻璃或纸片。
18、进一步地,所述安装基座包括底座和盖装在底座上的上盖板;
19、所述底座与上盖板之间设置有安装腔;
20、所述气管接头一端分别与软腔体和变刚度腔体连通,另一端穿过所述底座伸入安装腔,并通过位于安装腔内的螺母固定;
21、所述上盖板中部设置有用于连接外部机械臂的法兰;
22、所述法兰上设置有用于使气管接头与正压气源和负压气源连通的通孔。
23、进一步地,所述气管接头上还套装有限位轴套;
24、所述限位轴套位于底座与所述手指之间。
25、进一步地,所述软腔体与变刚度腔体采用硅胶浇筑而成。
26、进一步地,所述n=3,3个所述手指绕安装基座的中轴线均匀分布;每个手指中的变刚度腔体远离软腔体的一侧均朝向安装基座的中轴线的延长线。
27、本发明的有益效果:
28、1、本发明的软体机械手设置了软腔体与变刚度腔体相结合的手指,将软腔体一侧设为平面状,另一侧设为锯齿状或波纹状,使其在充入气体时能够向一侧弯曲,以抓取物体;还在变刚度腔体内设置了多层干扰层以及柔性传感层,能够在抽气时,利用各个干扰层之间产生的摩擦力,使变刚度腔体的结构刚度变大,同时还能够通过柔性传感层获取待抓取物体的硬度,以便外部控制板控制对变刚度腔体的抽气量,从而适应不同硬度的物体;二者的结合不仅能够柔性地抓取易碎物品,保证抓取的稳定性,提高最大抓取负载,而且还能通过柔性传感层感知外界环境,从而实现反馈调节。
29、2、本发明在柔性传感层一侧设置了带有多个凸起的微结构层,微结构层与柔性传感层粘附在一起,不仅充当了变刚度结构的元件,而且还提高了柔性传感单元的灵敏度。
30、3、本发明将多层干扰层分为多层第一干扰层和多层第二干扰层,并分别将第一干扰层的一端和第二干扰层的一端进行固定,使二者的另一端相互交错堆叠设置;使得变刚度腔体整体结构均匀有秩,刚度变更顺利。
31、4、本发明的安装基座结构简单,其中的安装腔体以及法兰上的通孔为正压气源和负压气源的连接管路以及柔性传感层的连接线路提供了容纳空间及过孔,使得整个机械手外观整洁美观。
32、5、本发明还在底座与所述手指之间设置了限位轴套,避免手指穿过底座,同时也便于手指的安装。
33、6、本发明的软腔体与变刚度腔体采用硅胶浇筑而成,制作简单且效率高。
34、7、本发明采用的控制介质为气体,无污染,仅需两个气源,一个为抓取过程提供正压,一个为变刚度过程提供负压,操作简单方便。
35、8、本发明在变刚度腔体内的干扰层之间嵌入柔性传感器,具有复合型功能,不仅能够使结构紧凑、集成度变高,而且还能感知外界环境,实现机械手与外部环境的互动。
技术特征:
1.一种兼具柔性传感和变刚度特性的软体机械手,其特征在于:包括用于连接外部机械臂的安装基座和均匀分布在安装基座同一侧的n个手指,n为大于或等于1的正整数;
2.根据权利要求1所述的兼具柔性传感和变刚度特性的软体机械手,其特征在于:所述柔性传感层(7)为压电聚偏二氟乙烯薄膜。
3.根据权利要求1或2所述的兼具柔性传感和变刚度特性的软体机械手,其特征在于:所述柔性传感层(7)与相邻的其中一个干扰层(8)之间还设置有微结构层(6);
4.根据权利要求3所述的兼具柔性传感和变刚度特性的软体机械手,其特征在于:多层所述干扰层(8)分为两组,分别为多层第一干扰层(81)和多层第二干扰层(82);所述第一干扰层(81)一端与变刚度腔体(5)内靠近安装基座的一端连接;所述第二干扰层(82)一端与变刚度腔体(5)内远离安装基座的一端连接;多层所述第一干扰层(81)的另一端和多层第二干扰层(82的另一端在变刚度腔体(5)中部相互交错堆叠设置;
5.根据权利要求4所述的兼具柔性传感和变刚度特性的软体机械手,其特征在于:在所述变刚度腔体(5)内,靠近安装基座的一端设有第一安装座(51),远离安装基座的一端设有第二安装座(52);
6.根据权利要求5所述的兼具柔性传感和变刚度特性的软体机械手,其特征在于:所述第一干扰层(81)和第二干扰层(82)均为纤维玻璃或纸片。
7.根据权利要求6所述的兼具柔性传感和变刚度特性的软体机械手,其特征在于:所述安装基座包括底座(3)和盖装在底座(3)上的上盖板(1);
8.根据权利要求7所述的兼具柔性传感和变刚度特性的软体机械手,其特征在于:所述气管接头(9)上还套装有限位轴套(11);
9.根据权利要求8所述的兼具柔性传感和变刚度特性的软体机械手,其特征在于:所述软腔体(4)与变刚度腔体(5)采用硅胶浇筑而成。
10.根据权利要求1所述的兼具柔性传感和变刚度特性的软体机械手,其特征在于:所述n=3,3个所述手指绕安装基座的中轴线均匀分布;每个手指中的变刚度腔体(5)远离软腔体(4)的一侧均朝向安装基座的中轴线的延长线。
技术总结
本发明公开了一种兼具柔性传感和变刚度特性的软体机械手,解决了刚性机械手难以胜任抓取易碎物品的任务,而软体机械手抓持力小且软体机械手很难嵌入传感器来感知外部环境的问题。具体包括安装基座和均匀分布在安装基座同一侧的N个手指,N为大于或等于1的正整数;安装基座上设有N个气管接头,气管接头上设有正压气孔和负压气孔;N个手指与N个气管接头一一对应;手指包括连接在一起的软腔体和变刚度腔体;软腔体与正压气孔连通;变刚度腔体与负压气孔连通;软腔体与变刚度腔体连接的一侧为平面状,远离变刚度腔体的一侧为锯齿状或波纹状;变刚度腔体内设有多层相互堆叠设置的干扰层,其中一对相邻的两干扰层之间设置有柔性传感层。
技术研发人员:赵鹏兵,熊传,杨玉鹏,张洁,顾奇犇,赵宇宇,董豪
受保护的技术使用者:西安电子科技大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!