一种用于自适应夹取的无动力源驱动的柔性夹具
本发明涉及精密器件取放,尤其涉及一种用于自适应夹取的无动力源驱动的柔性夹具。
背景技术:
1、在进行精密器件取放(拾取与放置,pick and place)时,目前一般通过人工方式定位目标器件,采用电动夹具进行拾取,然后定位目标区域,调整器件空间姿态,利用电动夹具放置器件。如在生物医学领域,常需利用精密微针对目标生物组织进行取样,目前一般通过人工方式,将精密微针安装在指定取样位置,但受限于操作空间,该操作极其费时、费劲,导致取样效率低下,难以进行批量化操作,而且通过手动方式容易受到人为因素影响,无法保证安装精度与操作可重复性,从而影响取样质量。
2、此外,由于电动夹具需要关节间相互调整配合,以适应待夹取器件的外形轮廓,因此需用引入动力源如电机,增加了系统控制的复杂度与难度,且电机润滑油容易挥发污染生物样本。因此,上述方式往往不适用于对环境污染敏感的生物医学领域。
技术实现思路
1、本申请实施例通过提供一种用于自适应夹取的无动力源驱动的柔性夹具,解决了现有技术中手动换针取样质量不稳定,提高了取样的精度、质量和效率。
2、本申请实施例提供了一种用于自适应夹取的无动力源驱动的柔性夹具,所述柔性夹具包括:
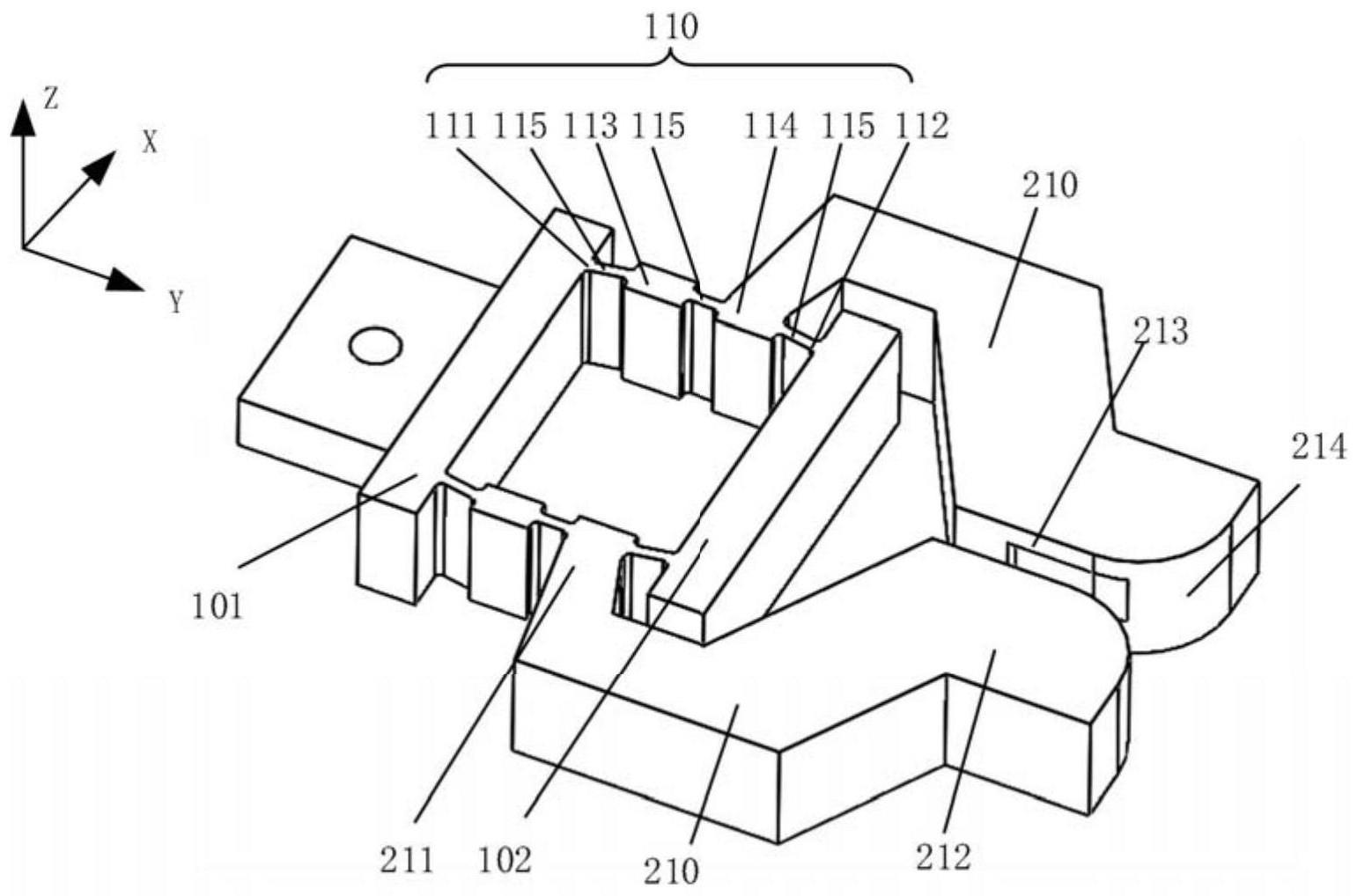
3、所述支撑部包括平行布置的第一支撑板、第二支撑板和两个对称设置的弹性臂,所述弹性臂具有相对的第一端和第二端,所述第一端与所述第一支撑板连接,所述第二端与所述第二支撑板连接,所述弹性臂包括薄壁、第一固定块和第二固定块,所述第一固定块和所述第二固定块间隔设置在所述薄壁上的,所述第一固定块设置在靠近所述第一支撑板的一侧,第二固定块设置在靠近所述第二支撑板的一侧,所述第一固定块和所述第二固定块将薄壁分割成沿薄壁长度方向并列排布的三个薄壁板,所述第二固定块的厚度大于所述薄壁板的厚度;以及,
4、所述夹持部包括两个对称设置的夹持爪,所述夹持爪为悬臂结构,所述夹持爪的固定端与所述第二固定块连接,所述夹持爪的悬臂端具有夹持面,两个所述夹持爪的所述夹持面相对。
5、进一步地,弹性臂的结构参数满足以下条件:
6、
7、其中,l为有效力臂,l为弹性臂长度的一半,b为薄壁板宽度,h为薄壁板厚度,r为夹持端相对于薄壁板扭转中心的旋转半径,w为夹持端夹持夹持物后相对初始状态的的位移,e为薄壁材料弹性模量,f为夹持端对夹持物的作用力。
8、进一步地,所述第二固定块的厚度与所述薄壁板的厚度比值大于3。
9、进一步地,所述夹持面与所述悬臂端的端面之间具有倒圆角。
10、进一步地,所述夹持爪的所述夹持面上具有卡槽,所述卡槽在所述夹持面上和所述倒圆角所在弧面上均具有开口。
11、进一步地,所述卡槽包括底座容置腔和本体容置腔,所述底座容置腔的底面到所述夹持面的距离大于所述本体容置腔的底面到所述夹持面的距离,以形成台阶面。
12、进一步地,所示支撑部还包括连接所述第一支撑板的中部和所述第二支撑板的中部的连接板。
13、进一步地,所述柔性夹具的支撑部和夹持部可拆卸连接。
14、进一步地,所述柔性夹具的材料为钛合金、铍青铜或铝合金的任一种金属材料。
15、进一步地,所述柔性夹具的材料为屈服强度与弹性模量之比大于30×10-3的非金属材料。
16、本申请实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
17、柔性夹具由对称的弹性臂,弹性臂由三段式薄壁板组成,薄壁上存在较厚的第一固定块和第二固定块,夹持爪固定在第二固定块上,通过第二固定块和薄壁板连接处的变形,实现第二固定块带动夹持爪张开夹取夹持物。三段式薄壁板结构利用了双稳态结构原理,通过扭矩使得三段式薄壁板产生变形,从而在两个稳定状态之间多次可逆地切换,由于避免了手动换针,提高了取样的精度和质量。同时无动力源驱动的取放方式能够避免动力源的引入污染生物组织,使该发明能够应用于要求更高的生物医学领域。
技术特征:
1.一种用于自适应夹取的无动力源驱动的柔性夹具,其特征在于,所述柔性夹具包括:
2.根据权利要求1所述的柔性夹具,其特征在于,所述弹性臂的结构参数满足以下条件:
3.根据权利要求1所述的柔性夹具,其特征在于,所述第二固定块的厚度与所述薄壁板的厚度比值大于3。
4.根据权利要求1所述的柔性夹具,其特征在于,所述夹持面与所述悬臂端的端面之间具有倒圆角。
5.根据权利要求4所述的柔性夹具,其特征在于,所述夹持爪的所述夹持面上具有卡槽,所述卡槽在所述夹持面上和所述倒圆角所在弧面上均具有开口。
6.根据权利要求5所述的柔性夹具,其特征在于,所述卡槽包括底座容置腔和本体容置腔,所述底座容置腔的底面到所述夹持面的距离大于所述本体容置腔的底面到所述夹持面的距离,以形成台阶面。
7.根据权利要求1~6任一项所述的柔性夹具,其特征在于,所示支撑部还包括连接所述第一支撑板的中部和所述第二支撑板的中部的连接板。
8.根据权利要求1~6任一项所述的柔性夹具,其特征在于,所述柔性夹具的支撑部和夹持部可拆卸连接。
9.根据权利要求1~6任一项所述的柔性夹具,其特征在于,所述柔性夹具的材料为钛合金、铍青铜或铝合金的任一种金属材料。
10.根据权利要求1~6任一项所述的柔性夹具,其特征在于,所述柔性夹具的材料为屈服强度与弹性模量之比大于30×10-3的非金属材料。
技术总结
本发明公开了一种用于自适应夹取的无动力源驱动的柔性夹具属于精密器件取放技术领域,柔性夹具有对称的弹性臂,弹性臂由三段式薄壁板组成,薄壁上存在较厚的第一固定块和第二固定块,夹持爪固定在第二固定块上,通过第二固定块和薄壁板连接处的变形,实现第二固定块带动夹持爪张开夹取夹持物。三段式薄壁板结构利用了双稳态结构原理,通过扭矩使得三段式薄壁板产生变形,从而在两个稳定状态之间多次可逆地切换,能够应用于精密微针取样等场景,由于避免了手动换针操作,提高了取样的精度、质量和效率。
技术研发人员:陈键伟,汪梦,袁菁,骆清铭
受保护的技术使用者:华中科技大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!