一种电动尾门的智能控制方法、设备及存储介质与流程
本发明涉及车辆控制,特别是涉及一种电动尾门的智能控制方法、设备及存储介质。
背景技术:
1、目前,汽车尾门脚踢传感控制器是为了满足对汽车用户体验舒适性需求的一种智能电动尾门后备箱感应开关产品。在打开尾门后备箱的时候,脚踢尾门动作可以让汽车用户解放双手,拥有更智能化,便捷性的体验感。
2、汽车尾门脚踢传感控制器主要为电容式传感器,但是电容式脚踢传感器有以下不足之处:电容脚踢传感器的电容电极位于车尾的中间位置,并排摆放,要求用户站在非常靠近车尾中间的位置做出脚踢动作,并且只支持踢腿动作,脚踢的探测灵敏度和探测范围有限。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种电动尾门的智能控制方法、设备及存储介质,可以精确检测脚踢动作,实现汽车电动尾门的智能控制。其具体方案如下:
2、一种电动尾门的智能控制方法,用于uwb主锚点,包括:
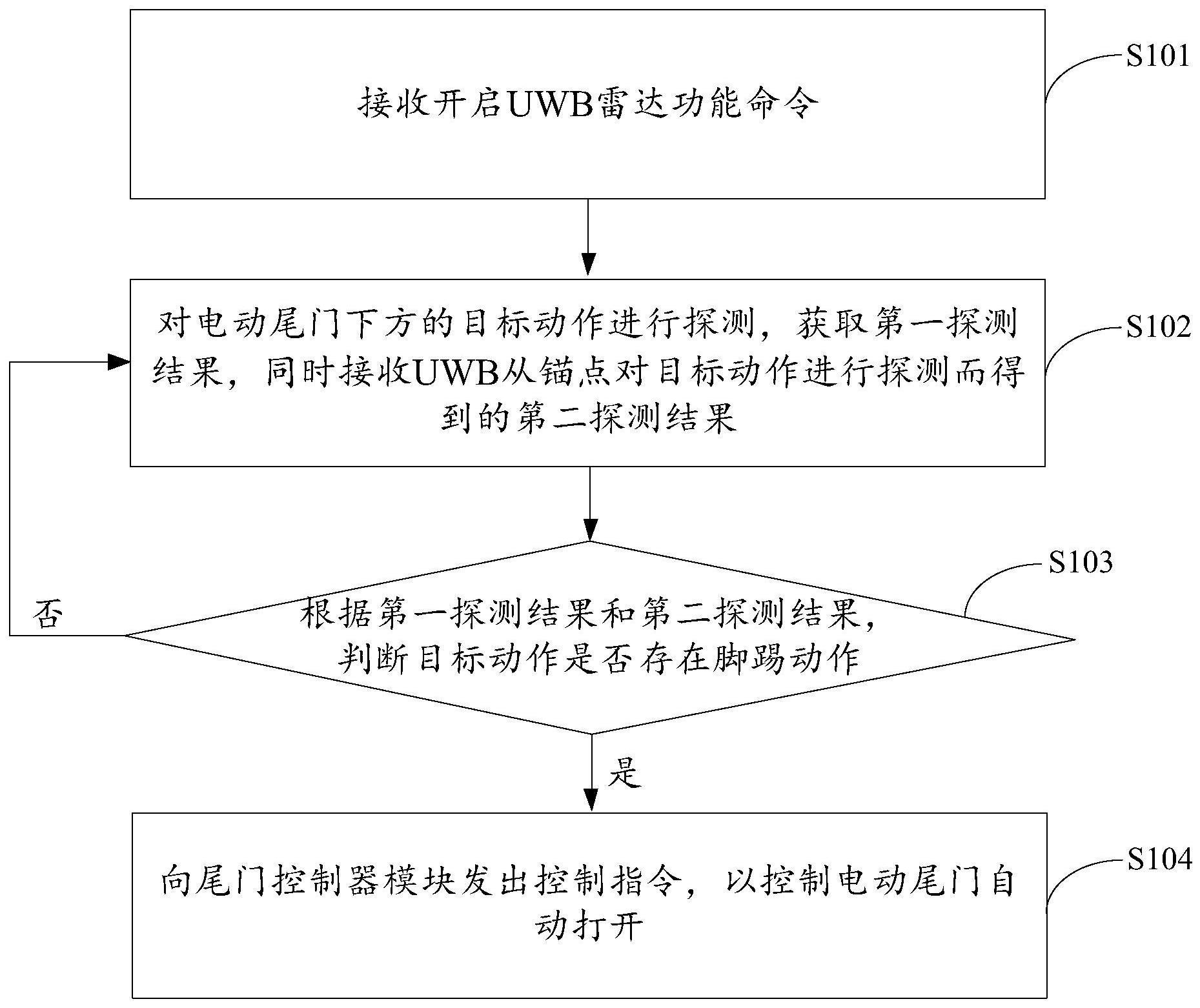
3、接收开启uwb雷达功能命令;
4、对电动尾门下方的目标动作进行探测,获取第一探测结果,同时接收uwb从锚点对所述目标动作进行探测而得到的第二探测结果;
5、根据所述第一探测结果和所述第二探测结果,判断所述目标动作是否存在脚踢动作;
6、若是,则向尾门控制器模块发出控制指令,以控制电动尾门自动打开。
7、优选地,在本发明实施例提供的上述电动尾门的智能控制方法中,对电动尾门下方的目标动作进行探测,获取第一探测结果,包括:
8、采用自发自收方式采集得到电动尾门下方的目标动作对应的第一探测数据,并发送至所述uwb主锚点的数据处理单元模块;
9、对所述第一探测数据进行处理,获取第一探测结果。
10、优选地,在本发明实施例提供的上述电动尾门的智能控制方法中,所述uwb从锚点对所述目标动作进行探测,包括:
11、所述uwb从锚点采用自发自收方式采集得到所述目标动作对应的第二探测数据;
12、对所述第二探测数据进行处理,获取第二探测结果,并将所述第二探测结果发送至所述uwb主锚点。
13、优选地,在本发明实施例提供的上述电动尾门的智能控制方法中,对所述第一探测数据进行处理,获取第一探测结果,包括:
14、将所述第一探测数据中uwb脉冲信号转换为数字值,并经过i/q调制后得到第一i/q数据;
15、根据所述第一i/q数据得到第一相位值,采用相位展开算法对所述第一相位值进行处理,并通过遍历滑动窗寻找脚踢相位特征值;
16、判断寻找到的相邻两个相位特征值之间的差值是否在相位阈值范围内;若是,则根据所述第一i/q数据得到第一能量值;
17、在得到所述第一能量值后,判断所述第一能量值是否大于第一能量阈值;若大于所述第一能量阈值,则继续判断所述第一能量值是否小于第二能量阈值,其中所述第二能量阈值大于所述第一能量阈值;若不大于所述第一能量阈值,则判定第一探测结果为不是脚踢动作;
18、若小于所述第二能量阈值,则判定第一探测结果为相位和能量判断成功;若不小于所述第二能量阈值,则判定所述第一探测结果为相位判断成功且能量判断失败。
19、优选地,在本发明实施例提供的上述电动尾门的智能控制方法中,对所述第二探测数据进行处理,获取第二探测结果,包括:
20、将所述第二探测数据中uwb脉冲信号转换为数字值,并经过i/q调制后得到第二i/q数据;
21、根据所述第二i/q数据得到第二相位值,采用相位展开算法对所述第二相位值进行处理,并通过遍历滑动窗寻找脚踢相位特征值;
22、判断寻找到的相邻两个相位特征值之间的差值是否在所述相位阈值范围内;若是,则根据所述第二i/q数据得到第二能量值;
23、在得到所述第二能量值后,判断所述第二能量值是否大于所述第一能量阈值;若大于所述第一能量阈值,则继续判断所述第二能量值是否小于所述第二能量阈值;
24、若小于所述第二能量阈值,则判定第二探测结果为相位和能量判断成功;若不小于所述第二能量阈值,则判定所述第二探测结果为相位判断成功且能量判断失败。
25、优选地,在本发明实施例提供的上述电动尾门的智能控制方法中,将所述第一探测数据中uwb脉冲信号转换为数字值,并经过i/q调制后得到第一i/q数据,包括:
26、利用低噪音放大器对所述第一探测数据进行放大处理,并将放大后的信号并传输至所述i/q混频器;
27、利用i/q混频器将i/q振荡器产生的信号波与放大后的信号实现正交解调,并传输至模拟数字转换器得到脉冲序列,以将所述第一探测数据中uwb脉冲信号的幅度和相位转换为数字值;
28、将得到的脉冲序列在i/q匹配滤波器中的序列交叉相关,并将结果在信号脉冲响应累加器中相加;
29、将相加得到的结果经过i/q解频器,得到第一i/q数据。
30、优选地,在本发明实施例提供的上述电动尾门的智能控制方法中,根据所述第一探测结果和所述第二探测结果,判断所述目标动作是否存在脚踢动作,包括:
31、若所述第一探测结果和所述第二探测结果均为相位判断成功且能量判断失败,则获取所述主锚点对应的第一脚踢时间和所述uwb从锚点对应的第二脚踢时间之间的差值,并判断所述差值是否小于时间差阈值;若是,则判定所述目标动作存在脚踢动作。
32、优选地,在本发明实施例提供的上述电动尾门的智能控制方法中,根据所述第一探测结果和所述第二探测结果,判断所述目标动作是否存在脚踢动作,还包括:
33、若所述第一探测结果或所述第二探测结果为相位和能量判断成功时,则判定所述目标动作存在脚踢动作。
34、本发明实施例还提供了一种电动尾门的智能控制设备,包括处理器和存储器,其中,所述处理器执行所述存储器中存储的计算机程序时实现如本发明实施例提供的上述电动尾门的智能控制方法。
35、本发明实施例还提供了一种计算机可读存储介质,用于存储计算机程序,其中,所述计算机程序被处理器执行时实现如本发明实施例提供的上述电动尾门的智能控制方法。
36、从上述技术方案可以看出,本发明所提供的一种电动尾门的智能控制方法,用于uwb主锚点,包括:接收开启uwb雷达功能命令;对电动尾门下方的目标动作进行探测,获取第一探测结果,同时接收uwb从锚点对目标动作进行探测而得到的第二探测结果;根据第一探测结果和第二探测结果,判断目标动作是否存在脚踢动作;若是,则向尾门控制器模块发出控制指令,以控制电动尾门自动打开。
37、本发明提供的上述电动尾门的智能控制方法,通过同时工作在雷达功能模式下的uwb主锚点和uwb从锚点来检测脚踢动作,可极大地提高汽车电动尾门脚踢传感器的脚踢检测灵敏度,从而实现汽车电动尾门的智能控制,并且汽车用户可站在靠近尾门的任意位置,增大用户脚踢动作的覆盖区域,极大提升触发的灵活性,更好地提升用户对尾门脚踢传感器的体验舒适性;同时也可以提高抗干扰能力,极大地减少误触发概率,使得脚踢检测功能更可靠;另外,uwb主锚点和uwb从锚点体积小,重量小,符合汽车轻量化的趋势。
38、此外,本发明还针对电动尾门的智能控制方法提供了相应的设备及计算机可读存储介质,进一步使得上述方法更具有实用性,该设备及计算机可读存储介质具有相应的优点。
- 还没有人留言评论。精彩留言会获得点赞!