欠驱动定手腕姿态的跟随传动串联关节机器人的制作方法
本发明涉及工业机器人,特别是涉及一种欠驱动定手腕姿态的跟随传动串联关节机器人。
背景技术:
1、近年来,我国机器人产业呈现强劲发展势头,产业规模快速增长,技术大幅提升,应用深度和广度加速拓展。为了适用于多种应用场合,工业机器人通常采用多轴串联关节机器人,且每一个关节都充当一个自由度单独控制。但在一些特定场合如码垛、钻孔、上下料等,无论机器人手臂运动到哪个位置,机器人的末端执行器的朝向始终为一个方向不变。针对这种场合,现有的工业机器人并没有特别简单的解决办法。如采用一个关节对应一个自由度的传统方法,则结构复杂,重量重,安装和维护的过程较为繁琐,成本也较高。因此,针对这种特殊工况,有必要研发一种结构更简单、更加灵活、成本更低的工业机器人。
技术实现思路
1、本发明要解决的技术问题是提供一种结构简单、使用灵活的欠驱动定手腕姿态的跟随传动串联关节机器人。
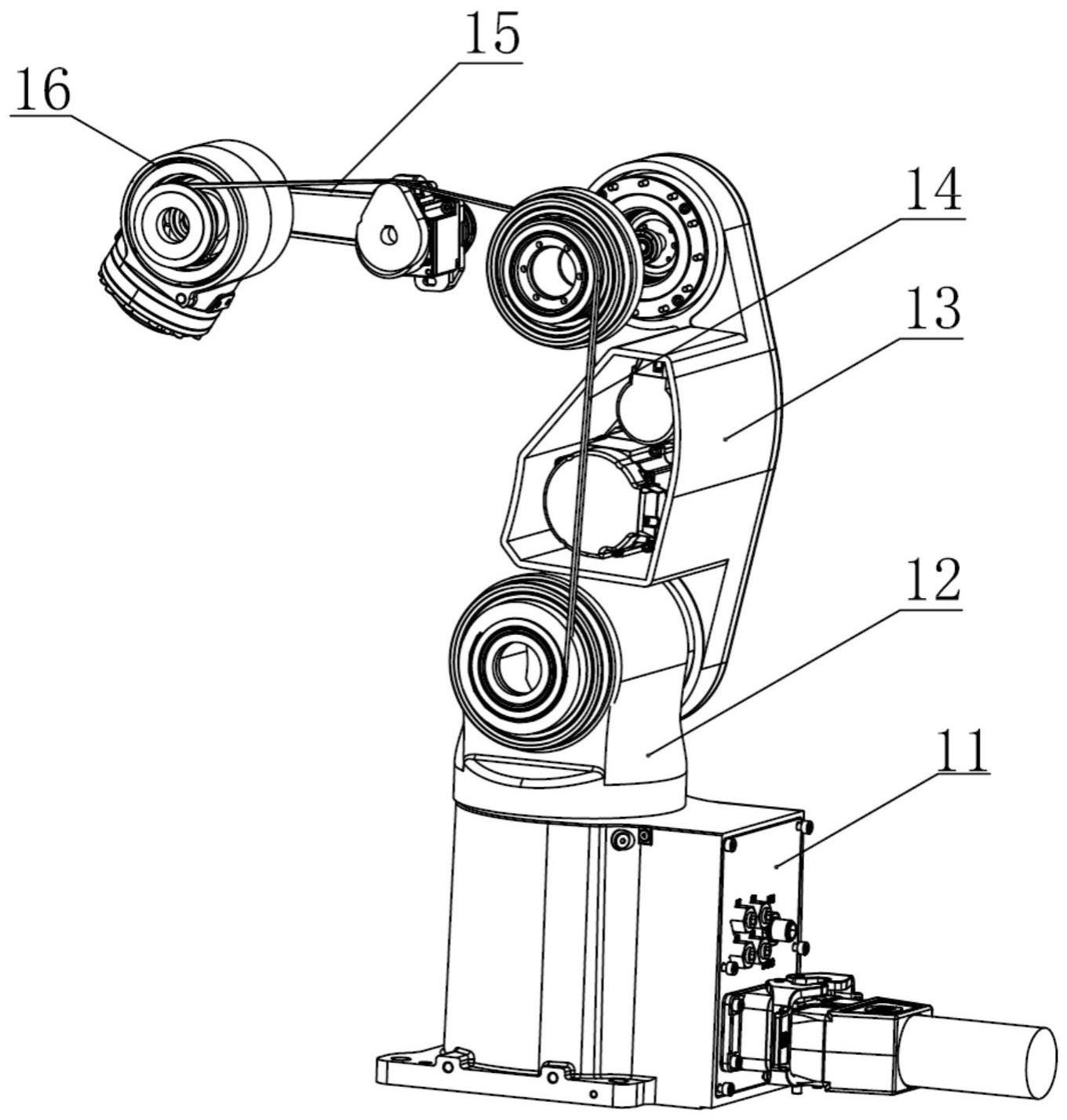
2、本发明欠驱动定手腕姿态的跟随传动串联关节机器人,包括依次连接的底座组件、腰部组件、大臂组件、小臂组件和手腕组件,所述大臂组件包括大臂本体,大臂本体内设置有大臂电机和小臂电机,大臂电机带动大臂组件相对于腰部组件转动,小臂电机带动小臂组件相对于大臂组件转动;小臂组件包括小臂本体,小臂本体内设置有末端执行器电机,末端执行器电机带动手腕组件的末端执行器转动;
3、还包括欠驱动跟随传动机构,欠驱动跟随传动机构包括固定设置在腰部组件的腰部同步轮,活动设置在小臂组件上的小臂关节轮,与小臂关节轮同步转动的小臂同步轮和固定设置在手腕组件上的手腕同步轮,腰部同步轮和小臂关节轮上共同设置有第一传动绳,小臂同步轮和手腕同步轮上共同设置有第二传动绳。
4、本发明欠驱动定手腕姿态的跟随传动串联关节机器人,其中所述底座组件包括底座本体,底座本体上设置有腰关节电机,腰关节电机通过腰关节减速器活动连接腰部组件的腰部本体。
5、本发明欠驱动定手腕姿态的跟随传动串联关节机器人,其中所述腰部本体与大臂减速器的输出端固定连接,大臂减速器的输入端上设置有大臂减速器端同步轮;大臂电机的输出轴上设置有大臂电机端同步轮,大臂减速器端同步轮和大臂电机端同步轮上设置有大臂同步带。
6、本发明欠驱动定手腕姿态的跟随传动串联关节机器人,其中所述小臂本体上设置有小臂减速器的输出端,小臂减速器的输入端上设置有小臂减速器端同步轮;小臂电机的输出轴上设置有小臂电机端同步轮,小臂减速器端同步轮和小臂电机端同步轮上设置有小臂同步带。
7、本发明欠驱动定手腕姿态的跟随传动串联关节机器人,其中所述手腕组件包括手腕本体,手腕本体上设置有末端执行器减速器的输出端,末端执行器减速器的输入端设置有末端执行器减速器端同步轮;末端执行器电机的输出轴上设置有末端执行器电机端同步轮,末端执行器减速器端同步轮和末端执行器电机端同步轮上设置有末端执行器同步带。
8、本发明欠驱动定手腕姿态的跟随传动串联关节机器人,其中所述末端执行器减速器端同步轮同时还连接有锥齿轮传动链的输入端,锥齿轮传动链的输出端连接末端执行器法兰。
9、本发明欠驱动定手腕姿态的跟随传动串联关节机器人,其中所述小臂本体内设置有调节轮,调节轮与第二传动绳相接触。
10、本发明欠驱动定手腕姿态的跟随传动串联关节机器人,其中所述调节轮为凸轮。
11、本发明欠驱动定手腕姿态的跟随传动串联关节机器人,其中所述第一传动绳和第二传动绳为传动带或传动链。
12、本发明欠驱动定手腕姿态的跟随传动串联关节机器人,其中所述电机的控制线缆从底座组件连出,外接控制柜对电机进行控制。
13、本发明欠驱动定手腕姿态的跟随传动串联关节机器人与现有技术不同之处在于,本发明欠驱动定手腕姿态的跟随传动串联关节机器人采用欠驱动传动方式,用四个致动器达到控制五个自由度的作用,使结构更加紧凑,且降低了成本、功耗和重量,增强了系统灵活性;本发明中欠驱动跟随传动可保持末端执行器在运动过程中始终保持固定角度,简化了控制手段,更方便应用;本发明所用电机和线缆均布置于机器人本体内部,可实现较高的防护等级。
14、下面结合附图对本发明的欠驱动定手腕姿态的跟随传动串联关节机器人作进一步说明。
技术特征:
1.一种欠驱动定手腕姿态的跟随传动串联关节机器人,包括依次连接的底座组件、腰部组件、大臂组件、小臂组件和手腕组件,其特征在于:所述大臂组件包括大臂本体,大臂本体内设置有大臂电机和小臂电机,大臂电机带动大臂组件相对于腰部组件转动,小臂电机带动小臂组件相对于大臂组件转动;小臂组件包括小臂本体,小臂本体内设置有末端执行器电机,末端执行器电机带动手腕组件的末端执行器转动;
2.根据权利要求1所述的欠驱动定手腕姿态的跟随传动串联关节机器人,其特征在于:所述底座组件包括底座本体,底座本体上设置有腰关节电机,腰关节电机通过腰关节减速器活动连接腰部组件的腰部本体。
3.根据权利要求2所述的欠驱动定手腕姿态的跟随传动串联关节机器人,其特征在于:所述腰部本体与大臂减速器的输出端固定连接,大臂减速器的输入端上设置有大臂减速器端同步轮;大臂电机的输出轴上设置有大臂电机端同步轮,大臂减速器端同步轮和大臂电机端同步轮上设置有大臂同步带。
4.根据权利要求1所述的欠驱动定手腕姿态的跟随传动串联关节机器人,其特征在于:所述小臂本体上设置有小臂减速器的输出端,小臂减速器的输入端上设置有小臂减速器端同步轮;小臂电机的输出轴上设置有小臂电机端同步轮,小臂减速器端同步轮和小臂电机端同步轮上设置有小臂同步带。
5.根据权利要求1所述的欠驱动定手腕姿态的跟随传动串联关节机器人,其特征在于:所述手腕组件包括手腕本体,手腕本体上设置有末端执行器减速器的输出端,末端执行器减速器的输入端设置有末端执行器减速器端同步轮;末端执行器电机的输出轴上设置有末端执行器电机端同步轮,末端执行器减速器端同步轮和末端执行器电机端同步轮上设置有末端执行器同步带。
6.根据权利要求5所述的欠驱动定手腕姿态的跟随传动串联关节机器人,其特征在于:所述末端执行器减速器端同步轮同时还连接有锥齿轮传动链的输入端,锥齿轮传动链的输出端连接末端执行器法兰。
7.根据权利要求1所述的欠驱动定手腕姿态的跟随传动串联关节机器人,其特征在于:所述小臂本体内设置有调节轮,调节轮与第二传动绳相接触。
8.根据权利要求7所述的欠驱动定手腕姿态的跟随传动串联关节机器人,其特征在于:所述调节轮为凸轮。
9.根据权利要求1所述的欠驱动定手腕姿态的跟随传动串联关节机器人,其特征在于:所述第一传动绳和第二传动绳为传动带或传动链。
10.根据权利要求1所述的欠驱动定手腕姿态的跟随传动串联关节机器人,其特征在于:所述电机的控制线缆从底座组件连出,外接控制柜对电机进行控制。
技术总结
本发明欠驱动定手腕姿态的跟随传动串联关节机器人涉及一种用于手腕本体始终保持初始姿态不变工况下的工业机器人。其目的是为了提供一种结构简单、使用灵活的机器人。本发明欠驱动定手腕姿态的跟随传动串联关节机器人包括底座组件、腰部组件、大臂组件、小臂组件和手腕组件,大臂组件的大臂本体内设置有分别用于带动大臂和小臂运动的大臂电机和小臂电机,小臂组件的小臂本体内设置有末端执行器电机,末端执行器电机带动手腕组件的末端执行器转动;还包括欠驱动跟随传动机构,欠驱动跟随传动机构包括腰部同步轮、小臂关节轮、小臂同步轮和手腕同步轮,腰部同步轮和小臂关节轮上设置有第一传动绳,小臂同步轮和手腕同步轮上设置有第二传动绳。
技术研发人员:李振国,庹华,韩峰涛,张雷,于文进,刘宁宁,孙宁宁,姜涛
受保护的技术使用者:珞石(北京)科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!