排爆消防机器人及其故障诊断控制方法与流程
本申请涉及消防机器人,尤其是涉及一种排爆消防机器人及其故障诊断控制方法。
背景技术:
1、在消防救援活动中,为了对困在火场的人员、重大危险货物进行转移,需要消防员深入火场。
2、目前,对于上述人或物的转移依赖于人力进行,在人、物多个,重量较大等情况下,需要消防员多次进入火场,多个消防员共同配合。这一方面,导致消防员发生危险的几率增大,尤其转移的物品是易爆危险品一类;另一方面,也可能延误其他救援工作,因此本申请提出一种新的技术方案。
技术实现思路
1、为了帮助消防人员在火场转移人或物,本申请提供一种排爆消防机器人及其故障诊断控制方法。
2、第一方面,本申请提供一种排爆消防机器人,采用如下的技术方案:
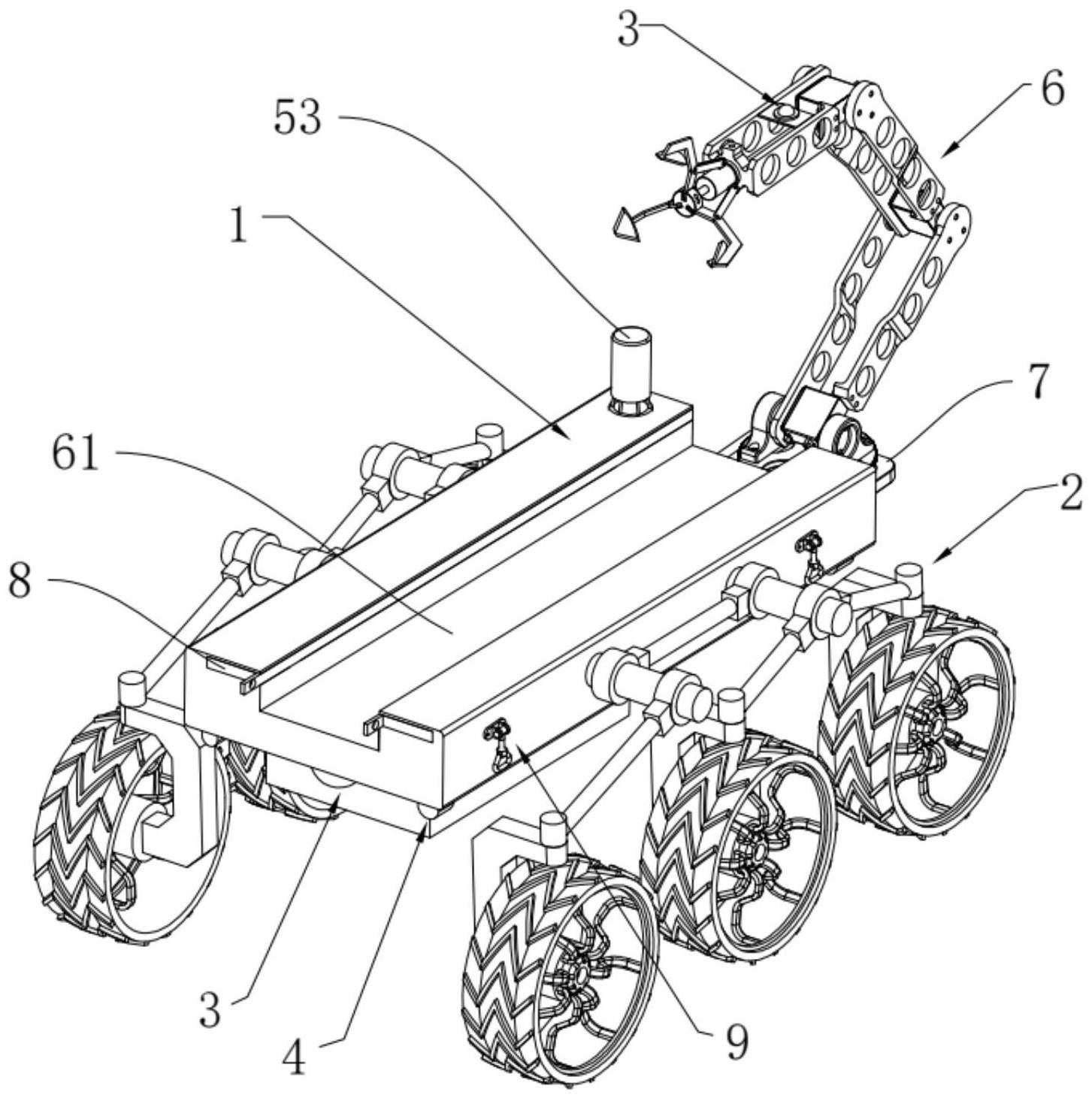
3、一种排爆消防机器人,包括移动平台及适配的控制系统,所述移动平台包括:
4、载物台,其用作承载对人或物,并做设备集成载体;
5、驱动机构,其包括分别安装于载物台两侧的组合活动轮组;
6、感知机构,其包括安装于载物台的图像感知单元和碰撞感知单元;
7、其中,所述组合活动轮组包括主轴、活动连杆、单体马达以及轮体;所述主轴固定于载物台的侧面,所述活动连杆的一端转动连接于主轴,另一端倾斜向下且安装单体马达,所述轮体固定于单体马达的输出轴;
8、所述控制系统包括处理模块和通讯模块,所述处理模块连接于感知机构、单体马达以及通讯模块。
9、可选的,所述载物台的同侧分布的主轴为多个,且相互之间设置连轴杆互连;
10、同一个所述主轴转动连接一个或多个活动连杆,且当活动连杆为多个时,其下端分别朝向主轴的两侧。
11、可选的,所述活动连杆的下端设置有c状轮架,所述c状轮架竖向且上端横向转动连接于活动连杆,下端固定单体马达。
12、可选的,还包括连接于处理模块的机械臂;
13、所述载物台的底部固定有板架,所述板架的一端伸出载物台且延伸在外的一段上固定机械臂;
14、所述机械臂的末段固定另一个图像感知单元。
15、可选的,所述载物台沿长度开设有呈上开口和端开口结构的置物凹槽,闲置状态的所述机械臂停滞于置物凹槽内。
16、可选的,所述置物凹槽的侧壁上段开设有横槽,所述横槽内滑移连接有横板,所述横板的一端固定有互连孔板,所述互连孔板上开设有通孔。
17、可选的,所述载物台的侧壁两端分别安装有绳扣。
18、可选的,所述处理模块还连接有声光警示单元,所述声光警示单元安装于载物台。
19、第二方面,本申请提供一种如上述任一所述排爆消防机器人的故障诊断控制方法,采用如下的技术方案:
20、一种如上述任一所述排爆消防机器人的故障诊断控制方法,处理模块配置为:
21、用于获取通讯模块与指定远端通信产生的交互数据;
22、识别交互数据,并判断是否存在马达调整指令,如果是,则根据马达调整指令查找预设的数据库,调用匹配的马达动作逻辑,并根据马达动作逻辑向各个单体马达发送控制参数;
23、用于识别排爆消防机器人的各个电子设备的反馈数据;
24、根据反馈数据中的先验特征指标进行故障诊断;其中,先验特征指标为根据经验定义的已知故障存在的特征;以及,
25、用于以通讯模块发送故障诊断和马达调整指令响应结果至指定远端,并进行机器人在线确认,得到指定远端的在线反馈;
26、当在线反馈丢失,且持续时长达到预设时间阈值,则触发本地控制逻辑。
27、可选的,所述本地控制逻辑,其包括:
28、根据先验特征指标,判断故障类型;以及,
29、根据故障类型查找预设的数据库,调用匹配的故障场景控制逻辑;
30、其中,所述先验特征指标包括均值t1、平均频次t2、绝对平均t3和权重平均t4;
31、数据标准化先验特征指标得到先验特征集:
32、标准化方法为其中,n为自然数,mean(ti)为数据集的均值,std(ti)为方差;
33、某一类反馈的指定特征的利用深度卷积自动编码器提取。
34、综上所述,本申请包括以下至少一种有益技术效果:可以利用移动平台帮助消防员在火场中搬运物品,且以通讯单元实现远程控制,由火场外的相关人员配合火场中的救援人员一同进行救援工作,深入部分消防人员不便进入的危险地区,或用作代替消防人员对某些危险品,如煤气罐等进行转移。
技术特征:
1.一种排爆消防机器人,包括移动平台及适配的控制系统,其特征在于,所述移动平台包括:
2.根据权利要求1所述的排爆消防机器人,其特征在于:所述载物台(1)的同侧分布的主轴(21)为多个,且相互之间设置连轴杆(211)互连;
3.根据权利要求2所述的排爆消防机器人,其特征在于:所述活动连杆(22)的下端设置有c状轮架(221),所述c状轮架(221)竖向且上端横向转动连接于活动连杆(22),下端固定单体马达(23)。
4.根据权利要求1所述的排爆消防机器人,其特征在于:还包括连接于处理模块(51)的机械臂(6);
5.根据权利要求1所述的排爆消防机器人,其特征在于:所述载物台(1)沿长度开设有呈上开口和端开口结构的置物凹槽(61),闲置状态的所述机械臂(6)停滞于置物凹槽(61)内。
6.根据权利要求1所述的排爆消防机器人,其特征在于:所述置物凹槽(61)的侧壁上段开设有横槽(62),所述横槽(62)内滑移连接有横板(8),所述横板(8)的一端固定有互连孔板(81),所述互连孔板(81)上开设有通孔。
7.根据权利要求1所述的排爆消防机器人,其特征在于:所述载物台(1)的侧壁两端分别安装有绳扣(9)。
8.根据权利要求1所述的排爆消防机器人,其特征在于:所述处理模块(51)还连接有声光警示单元(53),所述声光警示单元(53)安装于载物台(1)。
9.一种如权利要求1-8任一所述排爆消防机器人的故障诊断控制方法,其特征在于,包括:处理模块(51)配置为:
10.根据权利要求9所述的排爆消防机器人的故障诊断控制方法,其特征在于,所述本地控制逻辑,其包括:
技术总结
本发明公开了一种排爆消防机器人及其故障诊断控制方法,其中,机器人包括移动平台及适配的控制系统,移动平台包括:载物台,其用作承载对人或物,并做设备集成载体;驱动机构,其包括分别安装于载物台两侧的组合活动轮组;感知机构,其包括安装于载物台的图像感知单元和碰撞感知单元;所述控制系统包括处理模块和通讯模块,所述处理模块连接于感知机构、驱动机构以及通讯模块。故障诊断控制方法基于自身历史故障数据进行故障识别,并根据先验知识进行故障诊断。本申请可以帮助消防和公安人员转移人或危险物,并对设备进行故障诊断的效果。
技术研发人员:祁智,曹文斌,刘鲁刚,张叶红,陈淑玲
受保护的技术使用者:海风智能科技(浙江)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!