一种柔性机械臂主动振动控制器
本发明涉及自动化控制,更具体地说是一种柔性机械臂主动振动控制器。
背景技术:
1、柔性机械臂具有高自由度与可扩展性等特点,并且其依据自身的柔性连杆与柔性关节的搭配下能够实现高难度的作业,为此所相连接的振动控制器可将柔性机械臂所产生的振动频率进行平衡,促使机械臂的振动能够处于同一频率,使得通过控制器的加持下能够进一步的提高柔性机械臂的作业稳定性;
2、综上所述本发明人发现,现有的振动控制器主要存在以下缺陷:由于振动控制器的通电线轴以及振动组件均归纳于箱体内部,使得对柔性机械臂的振动控制时,振动组件运动过程中会与通电线轴进行相互接触,从而极易产生相互缠绕的现象,并且因通电线轴与振动组件的交织因素影响下使得通电线轴会被拉扯进而产生表皮破裂而造成的漏电情况。
技术实现思路
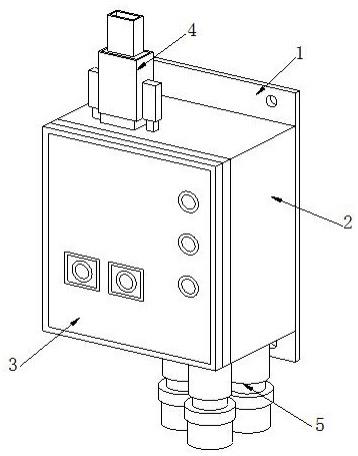
1、本发明实现技术目的所采用的技术方案是:一种柔性机械臂主动振动控制器,其结构包括:衔接板、主体箱、调控端、电源插座、振动监测体,所述衔接板与主体箱进行固定连接,所述调控端嵌入于主体箱的表层,所述电源插座固定于主体箱的上端,所述振动监测体设置于主体箱的下端并进行通电连接。
2、作为本发明的进一步改进,所述主体箱设有实心框、线轴腔、缠绕轴、定位板、分类组件、通电轴、振动组件,所述实心框内侧与线轴腔为一体化结构,所述线轴腔与缠绕轴进行间距配合,所述定位板固定于缠绕轴两侧并与线轴腔进行固定连接,所述分类组件左侧与定位板相连接,所述通电轴贯穿于分类组件内侧与缠绕轴相通,所述振动组件与通电轴进行通电连接并安装于分类组件的右侧部位,所述分类组件与调控端内侧相通并进行间隙配合;所述实心框为方形形状,所述线轴腔内壁为精抛光形态,所述缠绕轴在定位板上一共设有三条并且自身为伸缩杆制品,所述定位板在缠绕轴两侧各设有一块,所述分类组件以垂直方位进行布置,所述振动组件内部包含有相应的弹簧。
3、作为本发明的进一步改进,所述分类组件设有滑轮、稳定模块、限位体、穿插槽、平衡块、卡槽,所述滑轮嵌入于稳定模块的上层并进行间隙配合,所述限位体与稳定模块内侧进行固定连接,所述穿插槽与限位体内侧相通,所述平衡块与穿插槽相通,所述卡槽设置于平衡块、穿插槽、限位体的左侧端位,所述平衡块通过穿插槽与通电轴相衔接;所述滑轮与稳定模块在限位体上下端各设有一组,所述限位体为实心形态,所述穿插槽在限位体当中一共设有三处,所述平衡块在穿插槽边缘共设有两块,所述卡槽为长方形空心形态。
4、作为本发明的进一步改进,所述平衡块设有连接端、导温板、电接件、降温体、组装配件,所述连接端与导温板下端为一体化结构,所述电接件嵌入于导温板的内部下层,所述降温体与电接件进行通电连接,所述组装配件嵌入于降温体内部并与电接件进行通电连接,所述连接端与卡槽相通,所述电接件通过连接端、卡槽与线轴腔相通;所述连接端为塑料材质所制成,所述导温板为不规则实心形状并且内部含有三组电接件以及降温体,所述组装配件在降温体当中一共设有三条。
5、作为本发明的进一步改进,所述电接件设有凸块、导电体、绝缘层、电平衡组件、凹槽,所述凸块与导电体两侧为一体化结构,所述导电体贯穿于绝缘层下端并相贴合,所述电平衡组件外层与绝缘层相贴合并与导电体进行固定连接,所述凹槽嵌入于绝缘层、电平衡组件的上端,所述电平衡组件通过凹槽与组装配件、降温体进行通电连接;所述凸块在导电体两侧中端各设有一块,所述绝缘层形状与电平衡组件为一致,所述凹槽内部含有相应的电磁体。
6、作为本发明的进一步改进,所述调控端设有按键层、钢板、贴合层、卡块、装载槽、反弹组件,所述按键层与钢板相贴合,所述钢板与贴合层为一体化结构,所述卡块通过贴合层焊接于钢板的边缘,所述装载槽贯穿于贴合层的钢板中心与按键层内侧相通,所述反弹组件嵌入于装载槽内部并与按键层内侧相贴合,所述反弹组件与主体箱内侧相通;所述按键层形状与钢板为一致,所述钢板为不锈钢金属材质所制成并且自身的贴合层为抛平形态,所述卡块在钢板边缘共设有四块,所述装载槽为凹陷形态,所述反弹组件与装载槽形成无间隙衔接。
7、作为本发明的进一步改进,所述反弹组件设有锁定栓、稳定架、定位框、匹配槽、橡胶板,所述锁定栓嵌入于稳定架的中心部位,所述稳定架焊接于定位框的上下端,所述匹配槽设置于定位框的两侧,所述橡胶板固定于定位框的内部中心,所述锁定栓通过稳定架突入贴合层的钢板内侧上下边缘;所述稳定架为梯形形状并且在定位框上下端各设有一组,所述定位框两侧各设有一处匹配槽,所述橡胶板面积小于定位框的整体面积。
8、与现有技术相比,本发明具有如下有益效果:
9、1.本发明由主体箱进一步改进后,通过内部的分类组件将线轴腔与振动组件相互分开的基础下可保证振动组件无法与线轴腔的通电线进行任何接触,使得可从根源上解决振动组件与通电线的相互交织而导致的缠绕情况,进而依据线轴腔内部的缠绕轴能将多条通电线进行汇集缠绕于自身表层,使之能将通电线进行归纳,防止任意堆积所造成的后续不易维护的现象。
10、2.本发明由分类组件内部的平衡块进一步改进后,通过导温板以及内部降温体的相互搭配下,其能在振动组件进行通电控制过程中来带动降温体进行启用,以至于利用降温体的制冷效果能将穿插槽以及线轴腔内部通电线所产生的热能进行相互抵消,防止持续对柔性机械臂振动频率进行高性能控制下所产生的高温情况,间接的提高对柔性机械臂振动频率的控制精度。
11、3.本发明由调控端进一步改进后,通过钢板的贴合层能提高按键层与主体箱表层的装配稳定性,然后依靠装载槽内部的反弹组件加持下,反弹组件则利用自身的橡胶板来与特定按键进行衔接,使之通过自身反弹特点来辅助后续按键进行快速复位,提高对整体控制器的调控效率,通过反弹组件上下端的稳定架与锁定栓能够保证橡胶板稳定于装载槽内部,防止频繁反弹辅助而造成的橡胶板位置偏移。
技术特征:
1.一种柔性机械臂主动振动控制器,其结构包括:衔接板(1)、主体箱(2)、调控端(3)、电源插座(4)、振动监测体(5),其特征在于:所述衔接板(1)与主体箱(2)进行固定连接,所述调控端(3)嵌入于主体箱(2)的表层,所述电源插座(4)固定于主体箱(2)的上端,所述振动监测体(5)设置于主体箱(2)的下端并进行通电连接。
2.根据权利要求1所述的一种柔性机械臂主动振动控制器,其特征在于:所述主体箱(2)设有实心框(21)、线轴腔(22)、缠绕轴(23)、定位板(24)、分类组件(25)、通电轴(26)、振动组件(27),所述实心框(21)内侧与线轴腔(22)为一体化结构,所述线轴腔(22)与缠绕轴(23)进行间距配合,所述定位板(24)固定于缠绕轴(23)两侧并与线轴腔(22)进行固定连接,所述分类组件(25)左侧与定位板(24)相连接,所述通电轴(26)贯穿于分类组件(25)内侧与缠绕轴(23)相通,所述振动组件(27)与通电轴(26)进行通电连接并安装于分类组件(25)的右侧部位,所述分类组件(25)与调控端(3)内侧相通并进行间隙配合。
3.根据权利要求2所述的一种柔性机械臂主动振动控制器,其特征在于:所述分类组件(25)设有滑轮(251)、稳定模块(252)、限位体(253)、穿插槽(254)、平衡块(255)、卡槽(256),所述滑轮(251)嵌入于稳定模块(252)的上层并进行间隙配合,所述限位体(253)与稳定模块(252)内侧进行固定连接,所述穿插槽(254)与限位体(253)内侧相通,所述平衡块(255)与穿插槽(254)相通,所述卡槽(256)设置于平衡块(255)、穿插槽(254)、限位体(253)的左侧端位,所述平衡块(255)通过穿插槽(254)与通电轴(26)相衔接。
4.根据权利要求3所述的一种柔性机械臂主动振动控制器,其特征在于:所述平衡块(255)设有连接端(a1)、导温板(a2)、电接件(a3)、降温体(a4)、组装配件(a5),所述连接端(a1)与导温板(a2)下端为一体化结构,所述电接件(a3)嵌入于导温板(a2)的内部下层,所述降温体(a4)与电接件(a3)进行通电连接,所述组装配件(a5)嵌入于降温体(a4)内部并与电接件(a3)进行通电连接,所述连接端(a1)与卡槽(256)相通,所述电接件(a3)通过连接端(a1)、卡槽(256)与线轴腔(22)相通。
5.根据权利要求4所述的一种柔性机械臂主动振动控制器,其特征在于:所述电接件(a3)设有凸块(a31)、导电体(a32)、绝缘层(a33)、电平衡组件(a34)、凹槽(a35),所述凸块(a31)与导电体(a32)两侧为一体化结构,所述导电体(a32)贯穿于绝缘层(a33)下端并相贴合,所述电平衡组件(a34)外层与绝缘层(a33)相贴合并与导电体(a32)进行固定连接,所述凹槽(a35)嵌入于绝缘层(a33)、电平衡组件(a34)的上端,所述电平衡组件(a34)通过凹槽(a35)与组装配件(a5)、降温体(a4)进行通电连接。
6.根据权利要求1所述的一种柔性机械臂主动振动控制器,其特征在于:所述调控端(3)设有按键层(31)、钢板(32)、贴合层(33)、卡块(34)、装载槽(35)、反弹组件(36),所述按键层(31)与钢板(32)相贴合,所述钢板(32)与贴合层(33)为一体化结构,所述卡块(34)通过贴合层(33)焊接于钢板(32)的边缘,所述装载槽(35)贯穿于贴合层(33)的钢板(32)中心与按键层(31)内侧相通,所述反弹组件(36)嵌入于装载槽(35)内部并与按键层(31)内侧相贴合,所述反弹组件(36)与主体箱(2)内侧相通。
7.根据权利要求6所述的一种柔性机械臂主动振动控制器,其特征在于:所述反弹组件(36)设有锁定栓(361)、稳定架(362)、定位框(363)、匹配槽(364)、橡胶板(365),所述锁定栓(361)嵌入于稳定架(362)的中心部位,所述稳定架(362)焊接于定位框(363)的上下端,所述匹配槽(364)设置于定位框(363)的两侧,所述橡胶板(365)固定于定位框(363)的内部中心,所述锁定栓(361)通过稳定架(362)突入贴合层(33)的钢板(32)内侧上下边缘。
技术总结
本发明提供一种柔性机械臂主动振动控制器,其结构包括:衔接板、主体箱、调控端、电源插座、振动监测体,衔接板与主体箱进行固定连接,调控端嵌入于主体箱的表层,电源插座固定于主体箱的上端,振动监测体设置于主体箱的下端并进行通电连接;本发明由主体箱进一步改进后,通过内部的分类组件将线轴腔与振动组件相互分开的基础下可保证振动组件无法与线轴腔的通电线进行任何接触,使得可从根源上解决振动组件与通电线的相互交织而导致的缠绕情况,进而依据线轴腔内部的缠绕轴能将多条通电线进行汇集缠绕于自身表层,使之能将通电线进行归纳,防止任意堆积所造成的后续不易维护的现象。
技术研发人员:周维钧,潘树文,王雪洁,田强兴
受保护的技术使用者:浙大城市学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!