一种具有死区和时变约束功能的机械臂控制方法
本发明涉及领域,具体涉及一种具有死区和时变约束功能的机械臂控制方法。
背景技术:
1、机械臂轨迹跟踪控制,是通过各个关节的控制器输出驱动力矩控制各关节位置、速度等变量,从而高精度地伴随给定轨迹变化,以使机械臂实现期望理想路径的操作过程。传统控制器的设计通常采用基于被控对象模型的设计方法,通过创建机械臂动力学方程,依据传统控制理论设计控制律。
2、在实际应用中,由于负载质量、连杆质心、动/静摩擦力、以及环境干扰等不确定性因素,要想得到机械臂准确的数学模型十分困难,并且机械臂在运动过程中由于环境、负载等变化导致模型和参数也在随时变化,使这类方法的控制精度始终较低。另外在机械臂的实际控制过程中,在生产安全、工作空间及障碍位置等原因的限制下,往往需要限制机械臂的轨迹运动范围和运动速度,因此不仅需要对机械臂各关节位置进行限制,还需要对关节速度进行约束。
3、与电机驱动机械臂相比,单关节机械臂由于具有结构简单、体积小、质量轻、能耗低等特点,非常适合于装配、定位和搬运等重复性任务,且不需要考虑电机电流的约束。然而单关节机械臂由于一些零件、关节等的不灵敏或型号不适配等问题,存在输入死区现象,即系统对小的输入信号不敏感,当输入信号过小时系统没有对应的输出;并且单关节机械臂在运行过程中由于活动空间和障碍物的干扰,要求系统的控制精度极高,则存在时变约束,这导致了难以采用自适应模糊算法来针对单关节机械臂进行自适应控制。
4、综上,现有技术中的单关节机械臂控制方法无法同时解决机械臂控制中的模型不确定、状态不完全可测、输入死区、时变全状态约束,以及自适应性差等问题,并且还存在由于计算量大导致控制滞后的缺陷。
技术实现思路
1、本发明提供一种具有死区和时变约束功能的机械臂控制方法,以解决现有技术中单关节机械臂控制技术无法同时解决模型不确定、状态不完全可测、输入死区、时变全状态约束、自适应性差等问题,实现在模型不确定、具有输入死区且需满足状态不完全可测的时变全状态约束下,对单关节机械臂稳定且精确的进行自适应控制的目的。
2、本发明通过下述技术方案实现:
3、一种具有死区和时变约束功能的机械臂控制方法,包括:
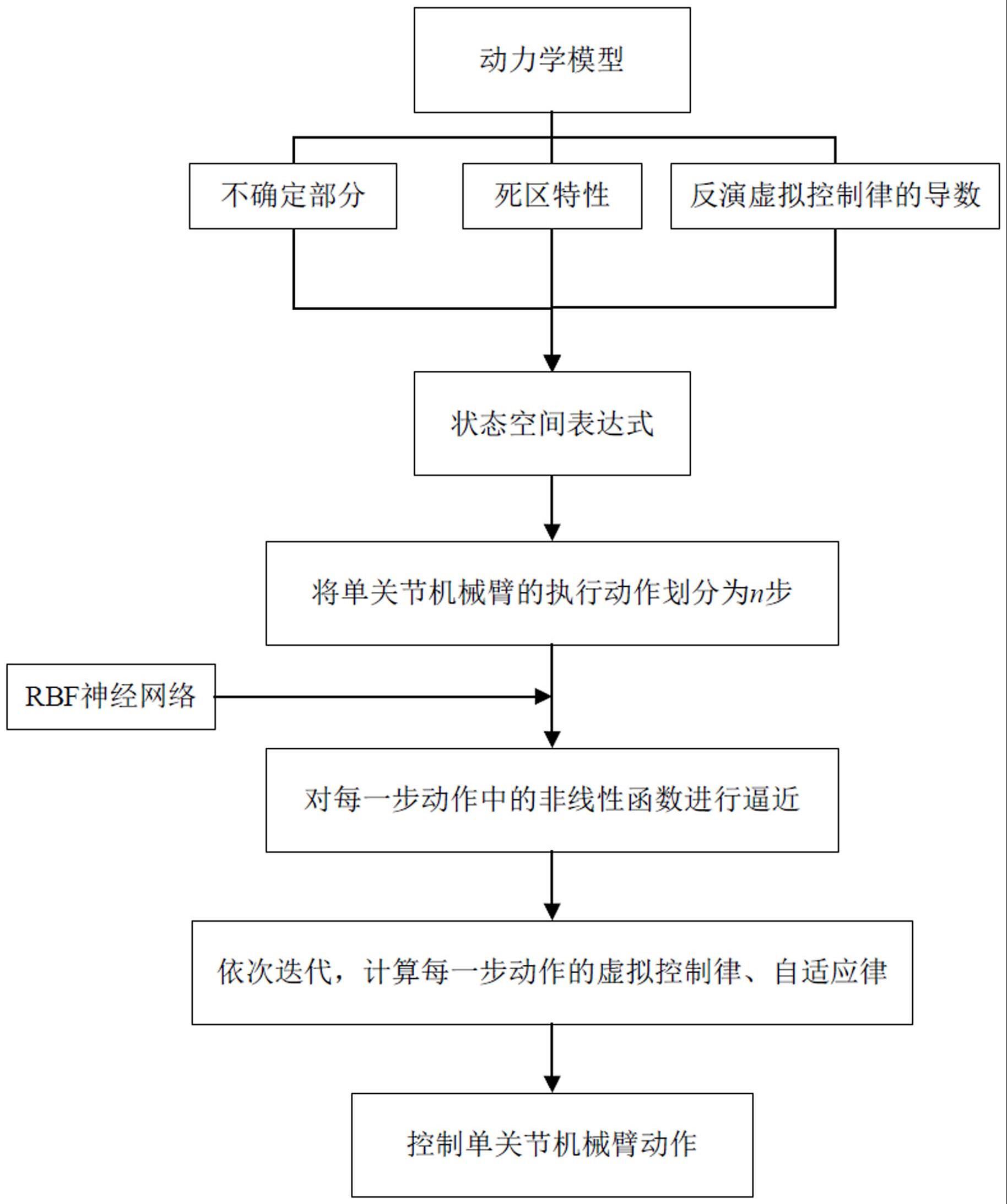
4、建立单关节机械臂的动力学模型,将所述动力学模型中的不确定部分与反演虚拟控制律的导数进行整合,并结合死区特性建立状态空间表达式;
5、基于状态空间表达式的动态面控制,将单关节机械臂的执行动作划分为n步,采用rbf神经网络对每一步动作中的非线性函数进行逼近,构建每一步动作的虚拟控制律、自适应律、理想控制率;
6、依次迭代,计算每一步动作的虚拟控制律、自适应律;
7、以第n步的虚拟控制率和自适应率作为实际自适应控制输出信号,以所述实际自适应控制输出信号控制单关节机械臂动作。
8、针对现有技术中对单关节机械臂的控制过程,无法同时解决模型不确定、状态不完全可测、输入死区、时变全状态约束、自适应性差等问题,本发明提出一种具有死区和时变约束功能的机械臂控制方法,本方法专用于单关节机械臂的控制。
9、本方法首先创建单关节机械臂的动力学模型,然后将动力学模型中的不确定部分与反演虚拟控制律的导数进行整合,再结合死区特性得到本技术所需的状态空间表达式。通过本方法所得到的状态空间表达式:(1)克服了由于负载质量、连杆质心、动/静摩擦力、以及环境干扰等不确定性因素所导致的模型不确定缺陷、解决了未知控制增益等多种不确定问题;(2)能够避免传统反演设计中反复求导造成的“复杂性爆炸”问题,显著降低了控制算法的复杂性和计算量,有利于提高控制的实时性;(3)能够有效解决单关节机械臂中输入死区非线性而带来的控制难题。
10、之后,本技术基于状态空间表达式将单关节机械臂的执行动作划分为n步,并采用rbf神经网络对每一步动作中的非线性函数进行逼近,即是依次对n步动作逐步的采用rbf神经网络进行迭代逼近,计算出每一步动作的虚拟控制率、自适应率,以第n步(即最后一步)的虚拟控制率和自适应率作为实际自适应控制输出信号,来控制单关节机械臂的动作。本技术通过将机械臂的执行动作划分为n步,并采用rbf神经网络逐步依次迭代计算的方式,能够有效逼近机械臂动力学模型中的不确定部分,保证机械臂各状态变量不超过相应的规定限制范围、从而满足输入死区、全状态约束(包括轨迹运动范围、运动速度、关节速度)和时变约束的限制。本技术具有良好的适应性、鲁棒性和抗干扰能力,同时控制精度很高,计算量相对现有技术更小,对于单关节机械臂系统的控制而言具有较高的实际应用价值。
11、进一步的,建立的状态空间表达式为:
12、
13、式中,x1、x2均为状态变量;、分别为x1、x2关于时间的导数;y为单关节机械臂输出轨迹;t为时间变量;u(d)为具有死区特性的输出力矩;v为理想控制律;d(v)为输入死区特性;gl、gr分别为死区特性的左斜率、右斜率;bl、br分别为左截距、右截距,且bl<0,br>0;j为机械臂的转动惯量;fd为摩擦模型,k1、k2均为正常数;ζ1(t)、ζ2(t)均为有界扰动;m为单关节机械臂连轴重量;g为重力加速度;l为单关节机械臂连轴长度;θ为单关节机械臂的旋转角速度,为单关节机械臂下一时刻的角速度;sgn表示符号函数;为θ关于时间的导数;k1为黏性摩擦参数;k2为库仑摩擦参数;d为单关节机械臂的高度。
14、本方案给出了整合单关节机械臂动力学模型中不确定部分与反演虚拟控制律的导数,并结合死区特性所建立的状态空间表达式的具体形式,填补了现有技术的空白。
15、进一步的,所述rbf神经网络中,神经网络高斯基函数为:
16、
17、式中,σi(x)表示第i步的高斯基函数;x为神经网络的输入向量;exp表示以自然对数为底的指数运算符;ci为隐含层的中心节点;bi为高斯基函数的宽度。
18、基于所述rbf神经网络高斯基函数,得到第i步的神经网络结构为:
19、;
20、式中,y为神经网络输出;wi为第i步的神经网络权值向量;
21、采用rbf神经网络对每一步动作中的非线性函数进行逼近的过程中,采用的未知函数为:
22、fi(xi) = wi*tσi(xi)+εi*(xi);
23、式中,fi(xi)为第i步的未知函数;wi*为第i步的神经网络最佳权值向量,εi*(xi)为第i步的最小逼近误差;t为转置运算符;xi为x的矩阵;σi(xi)表示矩阵xi所对应的高斯基函数。
24、进一步的,得到每一步动作的虚拟控制律、自适应律的方法包括:
25、确定当前动作属于划分后的第i步,i=1,2,…,n;
26、定义误差函数,所述误差函数包括跟踪误差或虚拟误差;计算滤波误差;
27、设置时变非对称障碍李亚普洛夫函数;
28、选择时变约束边界,并将误差函数坐标化,计算障碍李亚普洛夫函数关于时间的导数;
29、引入relu函数对输入死区特性进行逼近补偿,同时结合he初始化使输入和输出均服从相同的高斯分布;
30、基于杨氏不等式对障碍李亚普洛夫函数关于时间的导数进行变形,得到虚拟控制律、自适应律。
31、本方案在计算每一步动作的虚拟控制率、自适应率的过程中,均首先根据误差函数定义时变非对称障碍李亚普洛夫函数,通过障碍李亚普洛夫函数保证机械臂各状态变量不超过相应的规定限制范围,以同时解决机械臂控制中的模型不确定和全状态约束的问题,同时还证明了控制系统的稳定性,保证了闭环系统所有信号的半全局一致最终有界性。
32、并且,本方案对时变约束边界进行选择和对误差进行坐标化,使得本技术能够同时解决时变约束问题;此外,基于杨氏不等式对障碍李亚普洛夫函数关于时间的导数进行变形,并得到虚拟控制律和自适应律,进而得出合适的障碍李亚普洛夫函数。
33、进一步的,所述输入死区特性d(v)为:
34、
35、式中,d(v)为输入死区特性;v为理想控制律;k(t)为输入死区线性部分的斜率;d(v)为输入死区的非线性部分;gl、gr分别为死区特性的左斜率、右斜率;bl、br分别为左截距、右截距,且bl<0,br>0。
36、进一步的,所述relu函数为:relu=max(0,x);式中,relu表示relu函数;x为神经网络的输入向量;
37、使输入和输出均服从的高斯分布为:n(0, σ12);其中,,σ1为高斯分布的标准差;j为机械臂的转动惯量;ml为第l层神经元的数量。
38、引入relu函数对输入死区现象进行逼近补偿,补偿过程的计算速度、收敛速度均远快于传统的饱和激活函数,极大地提升了计算速度,更加有利于提高对单关节机械臂的控制实时性。
39、进一步的,当i=1时:
40、所述误差函数为第1步的跟踪误差z1、第二步的虚拟误差z2;设置的时变非对称障碍李亚普洛夫函数为:
41、
42、式中,v1为第1步的时变非对称障碍李亚普洛夫函数;q(z1)为符号函数sgn(z1);ka1(t)、kb1(t)均为时变约束边界;γ1为第1步的设计参数,且γ1>0;t为转置运算符;w1为第1步的神经网络权值向量;w1*为第1步的神经网络最佳权值向量;为第1步的神经网络权值向量误差;为观测误差矩阵;p为正定矩阵;
43、当i=2,3,…,n-1时:
44、所述误差函数为第i步的虚拟误差zi、第i+1步的虚拟误差zi+1;设置的时变非对称障碍李亚普洛夫函数为:
45、
46、式中,vi为第i步的时变非对称障碍李亚普洛夫函数;vi-1为第i-1步的时变非对称障碍李亚普洛夫函数;ξi为误差坐标化;ei为滤波误差;γi为第i步的设计参数,且γi>0;为第i步的神经网络权值向量误差;wi为第i步的神经网络权值向量;wi*为第i步的神经网络最佳权值向量;
47、当i=n时,所述误差函数为第n步的虚拟误差zn;设置的时变非对称障碍李亚普洛夫函数为:
48、
49、式中,vn为第n步的时变非对称障碍李亚普洛夫函数;vn-1为第n-1步的时变非对称障碍李亚普洛夫函数;ξn为误差坐标化;γn为第n步的设计参数,且γn>0;为第n步的神经网络权值向量误差;wn为第n步的神经网络权值向量;wn*为第n步的神经网络最佳权值向量。
50、进一步的,所述时变约束边界为:
51、
52、式中,yd(t)为给定期望轨迹;为期望轨迹的上界;为期望轨迹的下界;
53、通过如下公式将误差函数坐标化:
54、
55、式中,、为虚拟误差对于不同约束边界的坐标化;、为常数;qi为符号函数sgn( z i)。
56、进一步的,对于第i步动作而言,i=1,2,…,n:
57、构建的自适应律为:
58、;式中,为第i步动作的自适应律;γi为第i步的设计参数,且γi>0;为第i步的高斯基函数;μi为第i步的控制输入电压;zi为第i步的虚拟误差;φi为第i步中大于0的设计参数;wi为第i步的神经网络权值向量;
59、构建的理想控制率为:
60、;式中,vi为第i步的理想控制律;j为机械臂的转动惯量;ml为第l层神经元的数量;ki、ai均为第i步中大于0的设计参数;
61、当i=1时,构建的虚拟控制律为α1:
62、
63、当i=2,3,…,n时,构建的虚拟控制律为αi:
64、
65、其中,c1、ci、、均为大于0的设计参数;μ1为第1步的控制输入电压;z1为第1步的虚拟误差;t为转置运算符;w1为第1步的神经网络权值向量;为第1步的高斯基函数;为期望轨迹的导数;为第1步的观测误差;wi为第i步的神经网络权值向量; α i-1为第 i-1步的虚拟控制律;βi-1为αi-1经低通滤波器的输出;τi为任意给定的正常数;μi-1为第i-1步的控制输入电压;zi-1为第i-1步的虚拟误差。
66、需要说明的是,当i=n时,虚拟控制律为αn即为最终所需的控制器。
67、本发明与现有技术相比,具有如下的优点和有益效果:
68、1、本发明一种具有死区和时变约束功能的机械臂控制方法,具有良好的适应性、鲁棒性和抗干扰能力,同时控制精度很高,还能够解决单关节机械臂的输入死区非线性、全状态约束和时变约束问题,且计算量小、实时性高,还能够避免传统反演设计中反复求导造成的“复杂性爆炸”问题,显著减少了控制算法的复杂性和计算量,有利于提高控制的实时性,对于不确定的单关节机械臂控制而言具有较高的实际应用价值。
69、2、本发明一种具有死区和时变约束功能的机械臂控制方法,所建立的状态空间表达式结合了死区特性、考虑了输入死区非线性特征,有效提高了对单关节机械臂的控制精度;实现了在模型不确定、具有输入死区且需满足状态不完全可测的时变全状态约束下,对单关节机械臂稳定且精确的进行自适应控制的目的。
70、3、本发明一种具有死区和时变约束功能的机械臂控制方法,引入relu函数对输入死区现象进行逼近补偿,补偿过程的计算速度、收敛速度均远快于传统的饱和激活函数,极大地提升了计算速度,更加有利于提高控制的实时性。
71、4、本发明一种具有死区和时变约束功能的机械臂控制方法,引入rbf神经网络对每一步动作中的非线性函数进行迭代逼近,能够有效逼近机械臂动力学模型中的不确定部分,保证机械臂各状态变量不超过相应的规定限制范围、从而满足全状态约束(包括轨迹运动范围、运动速度、关节速度)和时变约束的限制。
72、5、本发明一种具有死区和时变约束功能的机械臂控制方法,引入he初始化来尽可能的使输入和输出服从相同的高斯分布:(1)非常有效的解决了学习率(learning rate)太高而导致在训练过程中参数更新太大、不幸使网络进入不被激活或是参数不能更新状态的问题;(2)从根源上克服了现有的xavier初始化仅适用于饱和激活函数,而在relu激活函数上性能差的问题;(3)能够与单关节机械臂环境充分结合,避免了传统的初始化方法用于单关节机械臂时以指数方式减小或放大输入信号幅度的问题;并且取转动惯量作为固有标量,可以保证每一层的输入方差尺度一致,进而更加提高控制精度。
73、6、本发明一种具有死区和时变约束功能的机械臂控制方法,嵌入了专门针对单关节机械臂的、关于自适应率的障碍李亚普洛夫函数,通过障碍李亚普洛夫函数保证单关节机械臂各状态变量不超过相应的规定限制范围,以同时解决单关节机械臂控制中的模型不确定和全状态约束的问题,还证明了控制系统的稳定性,保证了闭环系统所有信号的半全局一致最终有界性。
- 还没有人留言评论。精彩留言会获得点赞!