一种人工脑控制的机器人虚拟环境避障训练方法及系统
本发明涉及避障,尤其涉及一种人工脑控制的机器人虚拟环境避障训练方法及系统。
背景技术:
1、揭示大脑感知以及学习记忆等高级认知功能的工作机制是当前神经科学领域的研究热点之一。将人或动物作为研究对象不仅面临巨大的伦理问题,而且存在技术操作难度大,脑区结构复杂等问题,导致探究机制受多种因素干扰。因此,保留与人脑相类似的结构和功能的体外培养人工脑是研究大脑信息处理机制的理想模型,对理解复杂神经系统的学习记忆等高级认知功能的工作机理具有重要意义。
2、通过将细胞植入在微电极阵列(micro electrode arrays,meas)芯片上离散培养,神经元可逐渐发育形成突触耦合的神经元网络,研究人员能够利用导电电极或其他敏感半导体器件,非侵入性地同时记录和刺激多个位点的电生理活动。基于meas对人工脑进行培养,并构建人工脑控制的机器人避障系统是研究人工脑学习和感知等工作机制的重要方式和有效应用。
3、但是,由于人工脑具有电生理活动等特殊性,其本身存在的主要局限性有:人工脑培养周期长、成本高;在长时间刺激状态下,人工脑易疲劳及受到损伤;人工脑对培养环境依赖度高。实现机器人避障的物理环境也存在一定的限制:物理环境的搭建耗时费力,实现复杂场景的难度大,可重复性差,实验周期更久;物理环境存在系统噪声和误差;物理环境传感器精度受不同设备限制,数据传输存在延迟。由此可见,现有技术中的基于人工脑的避障系统存在避障环境不易搭建、可重复性差、训练环境差并且训练效果不好的问题。
技术实现思路
1、本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种机器人虚拟环境避障训练的方法及系统,旨在提供解决现有技术中的基于人工脑的避障系统存在避障环境不易搭建、可重复性差、训练环境差并且训练效果不好的问题。
2、第一方面,本发明提供一种人工脑控制的机器人虚拟环境避障训练方法,其中,所述方法包括:
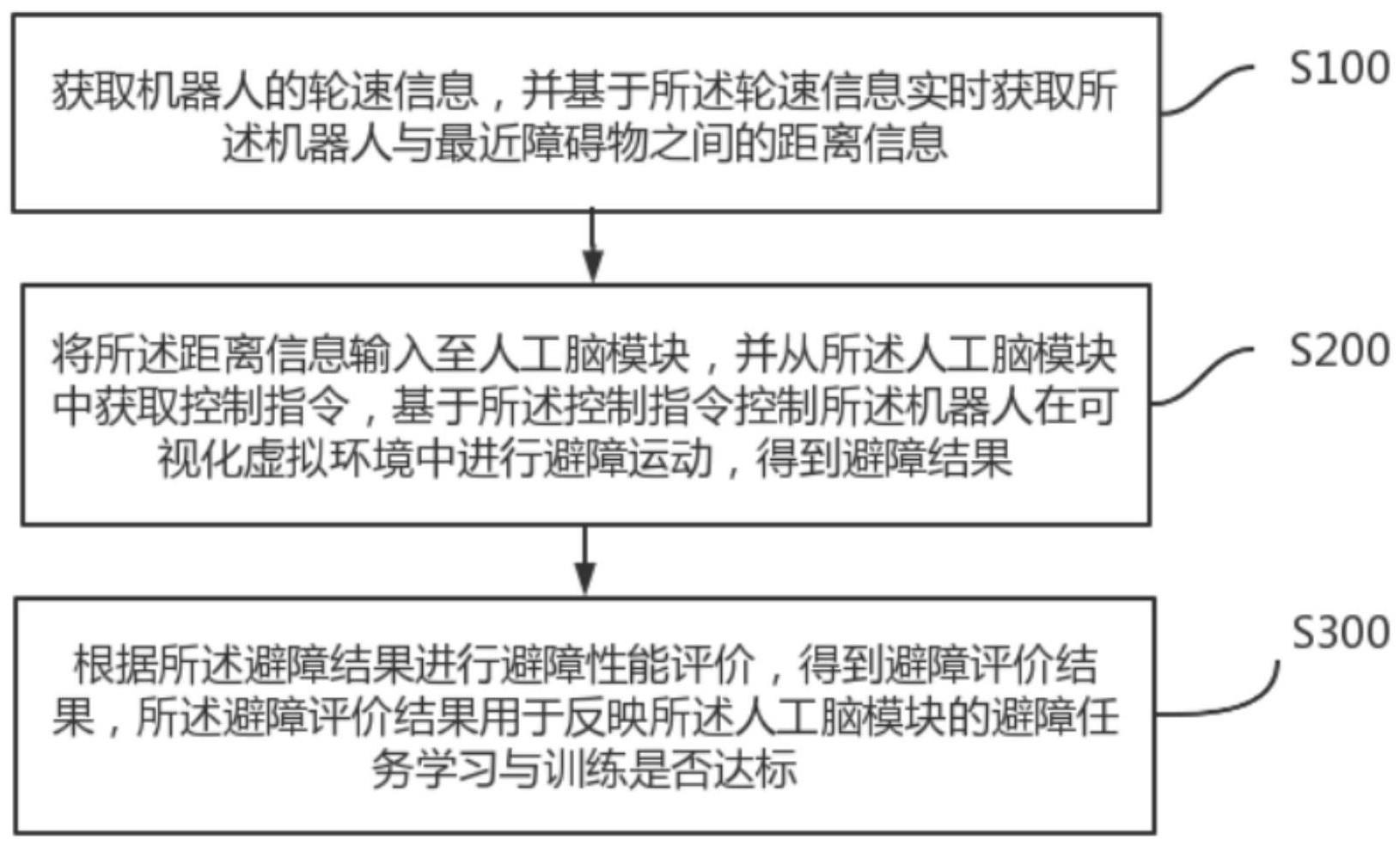
3、获取机器人的轮速信息,并基于所述轮速信息实时获取所述机器人与最近障碍物之间的距离信息;
4、将所述距离信息输入至人工脑模块,并从所述人工脑模块中获取控制指令,基于所述控制指令控制所述机器人在可视化虚拟环境中进行避障运动,得到避障结果;
5、根据所述避障结果进行避障性能评价,得到避障评价结果,所述避障评价结果用于反映所述人工脑模块的避障任务学习与训练是否达标。
6、在一种实现方式中,所述获取机器人的运动信息,并基于所述运动信息实时获取所述机器人与最近障碍物之间的距离信息,包括:
7、实时监测所述机器人的左轮与右轮的轮速信息,并基于所述轮速信息确定左轮与右轮之间的速度差值;
8、基于所述速度差值,控制所述机器人运动以及转向,并在所述机器人运动的过程中实时获取所述机器人与最近障碍物之间的距离信息。
9、在一种实现方式中,所述获取机器人的运动信息,并基于所述运动信息实时获取所述机器人与最近障碍物之间的距离信息,还包括:
10、确定所述机器人的运动方向,并获取所述运动方向两侧各90°范围内的障碍物的距离信息。
11、在一种实现方式中,所述将所述距离信息输入至人工脑模块,并从所述人工脑模块中获取控制指令,基于所述控制指令控制所述机器人在可视化虚拟环境中进行避障运动,得到避障结果,包括:
12、若所述人工脑模块确定所述机器人与最近障碍物之间的距离信息小于预设值,则输出所述控制指令;
13、获取所述控制指令所对应的速度信息与转向信息,并基于所述速度信息与转向信息控制所述机器人进行避障运动,得到所述避障结果。
14、在一种实现方式中,所述将所述距离信息输入至人工脑模块,并从所述人工脑模块中获取控制指令,基于所述控制指令控制所述机器人在可视化虚拟环境中进行避障运动,得到避障结果,还包括:
15、实时获取所述机器人的位置信息,并基于所述位置信息获取所述机器人与所述可视化虚拟环境的边界之间的边界距离,将所述边界距离输入至所述人工脑模块;
16、若所述人工脑模块确定所述边界距离小于或者等于边界阈值,则输出重置控制指令,并基于所述重置控制指令对所述机器人的位置信息进行重置处理。
17、在一种实现方式中,所述根据所述避障结果进行避障性能评价,得到避障评价结果,包括:
18、根据所述避障结果,确定两次碰撞之间虚拟机器人行走的平均距离,并在所述平均距离大于预设距离时,确定所述避障评价结果为达标;
19、或者,
20、根据所述避障结果,获取在预定的时间范围内,所述机器人撞击障碍物的次数,并在所述次数小于预设次数时,确定所述避障评价结果为达标。
21、在一种实现方式中,所述方法还包括:
22、若所述机器人撞击障碍物,则对所述障碍物的位置或者所述机器人位置进行调整。
23、第二方面,本发明实施例还包括一种人工脑控制的机器人虚拟环境避障训练系统,其中,所述系统包括:可视化虚拟环境、与所述可视化虚拟环境连接的人工脑模块、数据处理模块、人工控制模块、避障训练模块以及避障评价模块,其中,所述可视化虚拟环境包括机器人与障碍物;
24、所述数据处理模块,用于获取机器人的轮速信息,并基于所述轮速信息实时获取所述机器人与最近障碍物之间的距离信息;
25、所述避障训练模块,用于将所述距离信息输入至人工脑模块,并从所述人工脑模块中获取控制指令,基于所述控制指令控制所述机器人在可视化虚拟环境中进行避障运动,得到避障结果;
26、所述避障评价模块,用于根据所述避障结果进行避障性能评价,得到避障评价结果,所述避障评价结果用于反映所述人工脑模块的避障任务学习与训练是否达标。
27、第二方面,本发明实施例还提供一种终端设备,其中,所述终端设备包括存储器、处理器及存储在存储器中并可在处理器上运行人工脑控制机器人虚拟环境避障训练程序,处理器执行人工脑控制机器人虚拟环境避障训练程序时,实现上述方案中任一项所述的人工脑控制机器人虚拟环境避障训练方法的步骤。
28、第三方面,本发明实施例还提供一种计算机可读存储介质,其中,计算机可读存储介质上存储有人工脑控制机器人虚拟环境避障训练程序,所述人工脑控制机器人虚拟环境避障训练程序被处理器执行时,实现上述方案中任一项所述的人工脑控制机器人虚拟环境避障训练方法的步骤。有益效果:与现有技术相比,本发明提供了一种人工脑控制机器人虚拟环境避障训练方法,本发明首先获取机器人的轮速信息,并基于所述轮速信息实时获取所述机器人与最近障碍物之间的距离信。然后将所述距离信息输入至人工脑模块,并从所述人工脑模中获取控制指令,基于所述控制指令控制所述机器人在可视化虚拟环境中进行避障运动,得到避障结果。最后,根据所述避障结果进行避障性能评价,得到避障评价结果,所述避障评价结果用于反映所述人工脑模块的避障任务学习与训练是否达标。本发明的人工脑模块可通过连接可视化虚拟环境,学习和训练机器人避障的过程,更加高效、便捷、低成本实现对于避障任务的控制,实验的可重复性更高。并且,本发明还能对避障过程进行评价,实现全自动的训练过程。
- 还没有人留言评论。精彩留言会获得点赞!