一种机械臂导航手术中机械臂配准模块误差校准方法与流程
本发明涉及医疗设备领域,尤其涉及一种机械臂导航手术中机械臂配准模块误差校准方法。
背景技术:
1、目前传统的机械臂与ndi之间的配准方法,主要采用点云配准方式。在整个过程中,依赖机械臂机械结构精度和ndi反光求的精度,不同的器械精度和型号的ndi实际差距比较大。所以在实际配准中存在了比较明显的个体差异,所以点云配准中会产生不小的误差。这个误差会直接导致机械臂的配准偏差,在导航中导致结果无法达到预期。
2、综上所述,需要一种机械臂导航手术中机械臂配准模块误差校准方法来解决现有技术中所存在的不足之处。
技术实现思路
1、针对现有技术的不足,本发明提供了一种机械臂导航手术中机械臂配准模块误差校准方法,旨在解决上述问题。
2、为实现上述目的,本发明提供如下技术方案:一种机械臂导航手术中机械臂配准模块误差校准方法,包括以下步骤:
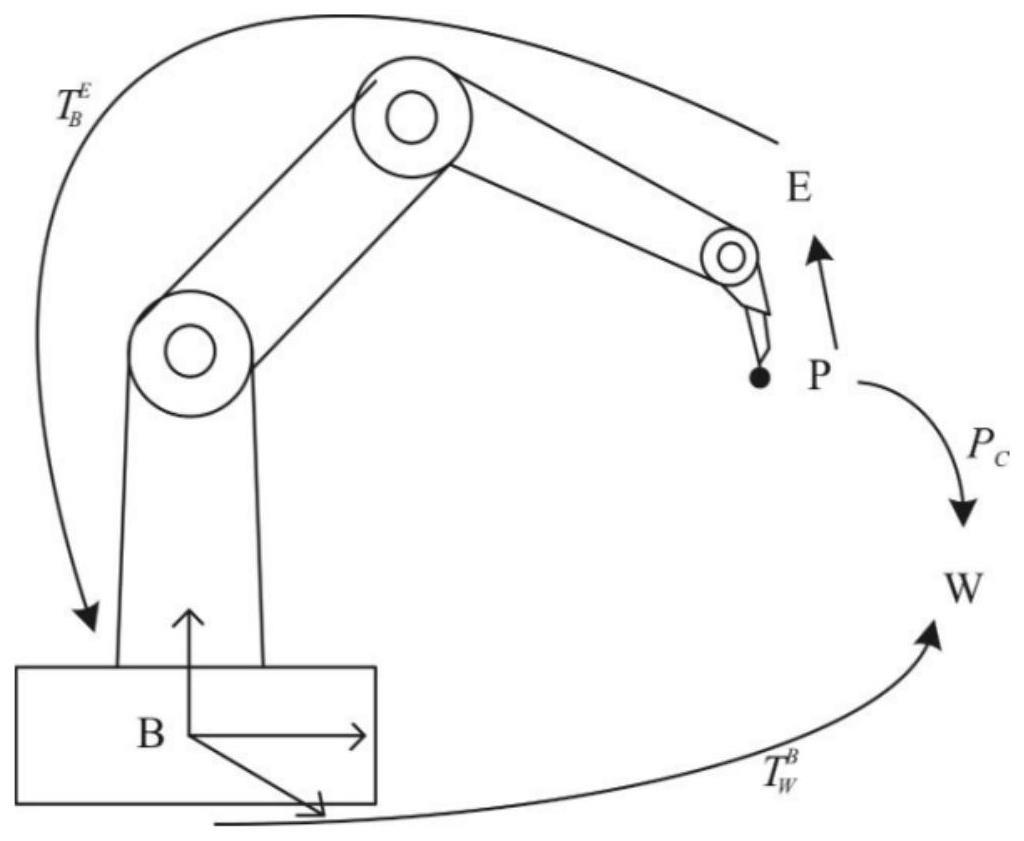
3、步骤一:安装机械臂台车和双目视觉设备,设定机械臂基坐标系b,机械臂末端杆坐标系e,双目视觉设备坐标系w,末端配准双目视觉标记物mark的工具中心点tcp点p;
4、步骤二:在机械臂基坐标系b内给定机械臂空间某一个点,让机械臂在这个位置的双目视觉标记物正对着双目视觉设备ndi,记录pc;
5、步骤三:通过机械臂获取当前机械臂的姿态,记录为rc;
6、步骤四:以当位置和姿态作为开始姿态,把矩阵绕x轴旋转θ度,保持机械臂pc点不变,需要保持双目视觉标记物mark在双目视觉设备ndi下可见,通过矩阵旋转公式后得到第一个计算位置r0;
7、步骤五:机械臂末端器械坐标系z轴为旋转轴,将r0进行5度为间隔绕机械臂末端z旋转;将第四步得到的r0通过变化矩阵得到每间隔5度的新矩阵,直至rn得到120个变化矩阵;
8、步骤六:指定机械臂定位120个矩阵,在每个姿态定位后保持一定时间,让ndi检测到稳定的数据并返回,得到机械臂120个位置下配准mark在ndi下的姿态和位置;
9、步骤七:将所有的矩阵所有4*4矩阵分为姿态部分3*3,即r0到rn,和坐标t0到tn;
10、步骤八:设定指向标准的姿态矩阵org,使用eigen::jacobisvd模块,做最小二乘解,得到中心点x0,即偏离预设tcp坐标的偏移量;
11、步骤九:把x加入初始tcp,继续步骤二到步骤八操作,得出偏移量x1,判断x1是否小于设定阈值。
12、可选的,所述步骤1中相对于机械臂末端杆坐标系的位置偏移量为pe=[x,y,z]。
13、可选的,所述步骤1中{b}与{e}的转换关系为:
14、teb=a1*a2*an
15、式中n表示机器人总的自由度,ai表示机器人相邻关节(i-1关节与i关节)之间的转换关系。
16、可选的,所述步骤四中的矩阵旋转公式为:
17、
18、可选的,所述步骤五中矩阵公式为:
19、
20、可选的,所述步骤八姿态矩阵为:
21、
22、可选的,所述步骤八中x计算具体为:
23、定义一个6列n行矩阵,前3列设置旋转后获取的到3*3矩阵,每个旋转矩阵对应一个目标姿态矩阵(正位,使用a矩阵数据初始化计算库,需要计算薄矩阵u;计算薄矩阵veigen::computethinv);,使用150组数据中空间坐标信息合计b去解出实际中心点,x=svda.solve(b)。
24、本发明的有益效果:
25、1、本发明中,通过计算ndi下检测的中心点和工装几何中心点的补偿。提供一种误差解决校准方法,在机械臂点云配准前,计算出一个偏差值,加入系统后,再次进行点云配准;配准效果好,偏移量小甚至无偏移量,具有一定的使用价值和推广价值。
技术特征:
1.一种机械臂导航手术中机械臂配准模块误差校准方法,其特征在于,包括以下步骤:
2.根据权利要求1所述一种机械臂导航手术中机械臂配准模块误差校准方法,其特征在于,所述步骤1中相对于机械臂末端杆坐标系的位置偏移量为pe=[x,y,z]。
3.根据权利要求1所述一种机械臂导航手术中机械臂配准模块误差校准方法,其特征在于,所述步骤1中{b}与{e}的转换关系为:
4.根据权利要求1所述一种机械臂导航手术中机械臂配准模块误差校准方法,其特征在于,所述步骤四中的矩阵旋转公式为:
5.根据权利要求1所述一种机械臂导航手术中机械臂配准模块误差校准方法,其特征在于,所述步骤五中矩阵公式为:
6.根据权利要求1所述一种机械臂导航手术中机械臂配准模块误差校准方法,其特征在于,所述步骤八姿态矩阵为:
7.根据权利要求1所述一种机械臂导航手术中机械臂配准模块误差校准方法,其特征在于,所述步骤八中x计算具体为:
技术总结
本发明公开了一种机械臂导航手术中机械臂配准模块误差校准方法,通过计算NDI下检测的中心点和工装几何中心点的补偿。提供一种误差解决校准方法,在机械臂点云配准前,计算出一个偏差值,加入系统后,再次进行点云配准;配准效果好,偏移量小甚至无偏移量,具有一定的使用价值和推广价值。
技术研发人员:叶君,杨旸,陈超
受保护的技术使用者:杭州邦杰星医疗科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!