三关节机械臂运动控制方法、装置、电子设备及存储介质与流程
本技术涉及机械控制,具体而言,涉及一种三关节机械臂运动控制方法、装置、电子设备及存储介质。
背景技术:
1、rtt三关节机械臂指由旋转关节、移动关节及移动关节依次相互链接构成的机械臂,对于rtt三关节机械臂的运动控制,通常可通过机械臂的运动学逆解实现,运动学逆解也即指已知机械臂末端位姿,求解机械臂中各运动关节的运动矢量。
2、目前,如何实现rtt三关节机械臂的逆解解析成为亟待解决的技术问题。
技术实现思路
1、本技术的目的在于,针对上述现有技术中的不足,提供一种三关节机械臂运动控制方法、装置、电子设备及存储介质,以便于实现rtt构型的三关节机械臂的运动学逆解解析。
2、为实现上述目的,本技术实施例采用的技术方案如下:
3、第一方面,本技术实施例提供了一种三关节机械臂运动控制方法,应用于机械臂控制系统中的处理设备,所述系统包括处理设备及具有目标结构的三关节机械臂,所述三关节机械臂包括依次相互链接的旋转关节、第一移动关节及第二移动关节;所述方法包括:
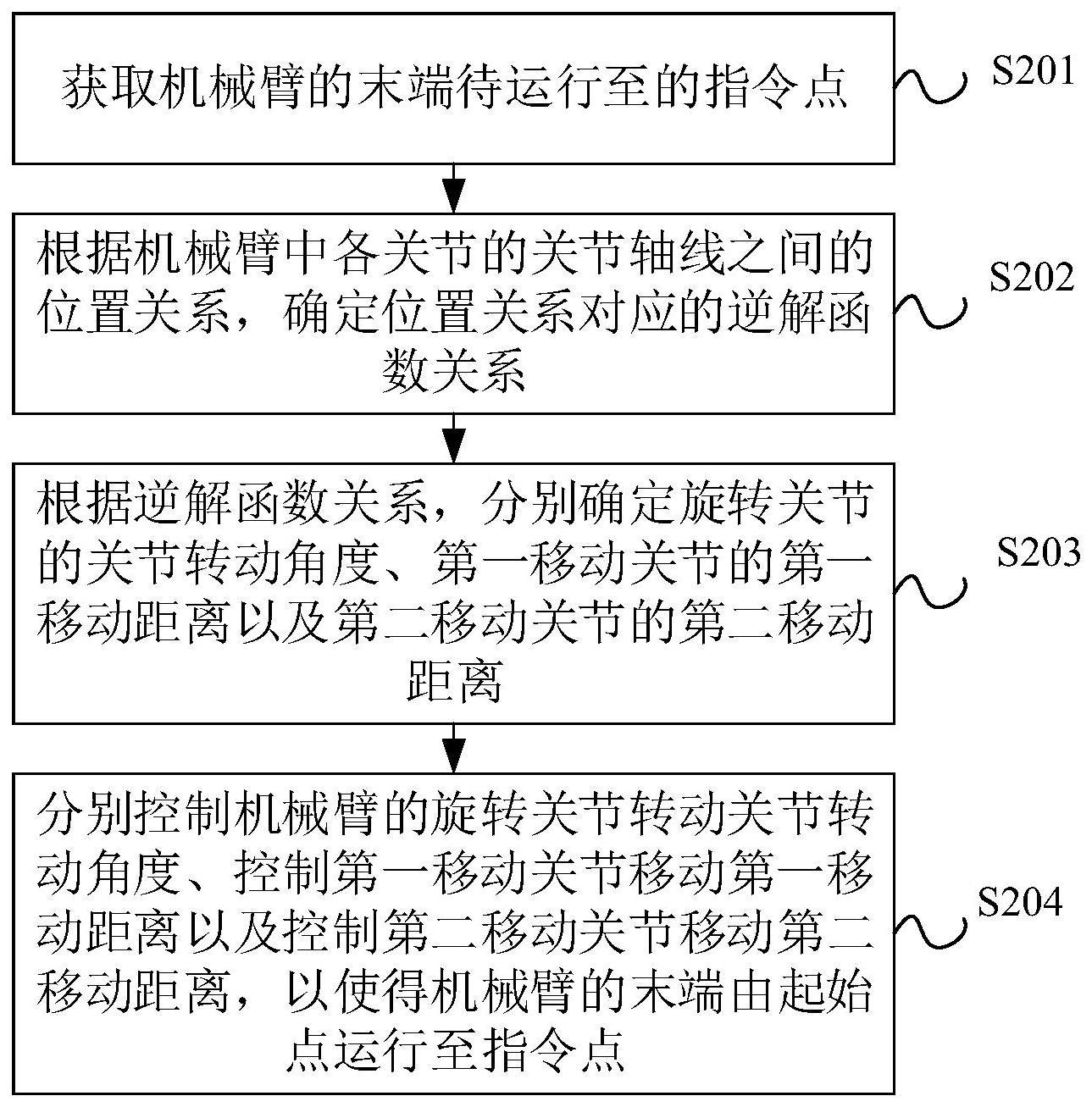
4、获取所述机械臂的末端待运行至的指令点;
5、根据所述机械臂中各关节的关节轴线之间的位置关系,确定所述位置关系对应的逆解函数关系;
6、根据所述逆解函数关系,分别确定所述旋转关节的关节转动角度、所述第一移动关节的第一移动距离以及所述第二移动关节的第二移动距离;所述逆解函数关系根据基准函数关系变形得到,所述基准函数关系根据中间点的代数等式关系以及中间点与所述指令点之间的约束函数关系构建得到;所述中间点的代数等式关系根据所述机械臂的末端当前所在的起始点以及关节关联参数构建,所述关节关联参数包括:所述第一移动关节的第一移动距离、所述第一移动关节的第一关节轴线的第一方向矢量、所述第二移动关节的第二移动距离以及所述第二移动关节的第二关节轴线的第二方向矢量;所述中间点包括所述机械臂的末端由所述起始点运行至所述指令点的过程中所经过的指定点;
7、分别控制所述机械臂的旋转关节转动所述关节转动角度、控制所述第一移动关节移动所述第一移动距离以及控制所述第二移动关节移动所述第二移动距离,以使得所述机械臂的末端由所述起始点运行至所述指令点。
8、可选地,所述根据所述机械臂中各关节的关节轴线之间的位置关系,确定所述位置关系对应的逆解函数关系,包括:
9、根据各关节的关节轴线之间的位置关系,确定所述位置关系下各关节轴线的方向矢量之间所满足的矢量等式关系;
10、根据所述矢量等式关系、以及所述基准函数关系,确定所述位置关系对应的逆解函数关系。
11、可选地,所述中间点的代数等式关系包括:第一中间点对应的第一代数等式关系以及第二中间点对应的第二代数等式关系;
12、所述第一代数等式关系用于表征所述第一中间点与所述起始点、所述第二移动距离以及所述第二方向矢量之间的关系;
13、所述第二代数等式关系用于表征所述第二中间点与所述第一中间点、所述第一移动距离以及所述第一方向矢量之间的关系。
14、可选地,所述中间点与所述指令点之间的约束函数关系包括:几何约束函数和代数约束函数;
15、所述几何约束函数用于表征所述第二中间点与所述指令点以及所述旋转关节的旋转关节轴线的方向矢量之间的几何关系;
16、所述代数约束函数用于表征所述第二中间点与所述指令点以及所述旋转关节轴线上的参考点之间的代数关系。
17、可选地,若所述旋转关节的旋转关节轴线不垂直于所述第二移动关节的第二关节轴线,且所述旋转关节轴线垂直于所述第一移动关节的第一关节轴线;则所述逆解函数关系为所述基准函数关系中所述第二移动距离相关的函数;
18、所述根据所述逆解函数关系,分别确定所述旋转关节的关节转动角度、所述第一移动关节的第一移动距离以及所述第二移动关节的第二移动距离,包括:
19、根据所述逆解函数关系,确定所述第二移动距离;
20、根据所述第二移动距离、以及所述基准函数关系中所述第一移动距离与所述第二移动距离之间的函数关系,确定所述第一移动距离;
21、根据所述第二移动距离以及所述第一代数等式关系,确定所述第一中间点的值;
22、根据所述第一中间点的值、所述第一移动距离以及所述第二代数等式关系,确定所述第二中间点的值;
23、根据所述第二中间点的值、所述指令点以及预设的空间点与关节轴线之间的运动函数关系,确定所述关节转动角度的值。
24、可选地,若所述旋转关节的旋转关节轴线不垂直于所述第一移动关节的第一关节轴线,且所述旋转关节轴线垂直于所述第二移动关节的第二关节轴线;则所述逆解函数关系为所述基准函数关系中所述第一移动距离相关的函数;
25、所述根据所述逆解函数关系,分别确定所述旋转关节的关节转动角度、所述第一移动关节的第一移动距离以及所述第二移动关节的第二移动距离,包括:
26、根据所述逆解函数关系,确定所述第一移动距离;
27、根据所述第一移动距离、以及所述基准函数关系中所述第一移动距离与所述第二移动距离之间的函数关系,确定所述第二移动距离;
28、根据所述第二移动距离以及所述第一代数等式关系,确定所述第一中间点的值;
29、根据所述第一中间点的值、所述第一移动距离以及所述第二代数等式关系,确定所述第二中间点的值;
30、根据所述第二中间点的值、所述指令点以及预设的空间点与关节轴线之间的运动函数关系,确定所述关节转动角度的值。
31、可选地,若所述旋转关节的旋转关节轴线不垂直于所述第一移动关节的第一关节轴线,且所述旋转关节轴线不垂直于所述第二移动关节的第二关节轴线;则所述逆解函数关系为所述基准函数关系中所述第二移动距离相关的函数;
32、所述根据所述逆解函数关系,分别确定所述旋转关节的关节转动角度、所述第一移动关节的第一移动距离以及所述第二移动关节的第二移动距离,包括:
33、根据所述逆解函数关系,确定所述第二移动距离;
34、根据所述第二移动距离、以及所述基准函数关系中所述第一移动距离与所述第二移动距离之间的函数关系,确定所述第一移动距离;
35、根据所述第二移动距离以及所述第一代数等式关系,确定所述第一中间点的值;
36、根据所述第一中间点的值、所述第一移动距离以及所述第二代数等式关系,确定所述第二中间点的值;
37、根据所述第二中间点的值、所述指令点以及预设的空间点与关节轴线之间的运动函数关系,确定所述关节转动角度的值。
38、第二方面,本技术实施例还提供了一种三关节机械臂运动控制装置,应用于机械臂控制系统中的处理设备,所述系统包括处理设备及具有目标结构的三关节机械臂,所述三关节机械臂包括依次相互链接的旋转关节、第一移动关节及第二移动关节;所述装置包括:获取模块、确定模块、控制模块;
39、所述获取模块,用于获取所述机械臂的末端待运行至的指令点;
40、所述确定模块,用于根据所述机械臂中各关节的关节轴线之间的位置关系,确定所述位置关系对应的逆解函数关系;
41、所述确定模块,用于根据所述逆解函数关系,分别确定所述旋转关节的关节转动角度、所述第一移动关节的第一移动距离以及所述第二移动关节的第二移动距离;所述逆解函数关系根据基准函数关系变形得到,所述基准函数关系根据中间点的代数等式关系以及中间点与所述指令点之间的约束函数关系构建得到;所述中间点的代数等式关系根据所述机械臂的末端当前所在的起始点以及关节关联参数构建,所述关节关联参数包括:所述第一移动关节的第一移动距离、所述第一移动关节的第一关节轴线的第一方向矢量、所述第二移动关节的第二移动距离以及所述第二移动关节的第二关节轴线的第二方向矢量;所述中间点包括所述机械臂的末端由所述起始点运行至所述指令点的过程中所经过的指定点;
42、所述控制模块,用于分别控制所述机械臂的旋转关节转动所述关节转动角度、控制所述第一移动关节移动所述第一移动距离以及控制所述第二移动关节移动所述第二移动距离,以使得所述机械臂的末端由所述起始点运行至所述指令点。
43、可选地,所述确定模块,具体用于根据各关节的关节轴线之间的位置关系,确定所述位置关系下各关节轴线的方向矢量之间所满足的矢量等式关系;
44、根据所述矢量等式关系、以及所述基准函数关系,确定所述位置关系对应的逆解函数关系。
45、可选地,所述中间点的代数等式关系包括:第一中间点对应的第一代数等式关系以及第二中间点对应的第二代数等式关系;
46、所述第一代数等式关系用于表征所述第一中间点与所述起始点、所述第二移动距离以及所述第二方向矢量之间的关系;
47、所述第二代数等式关系用于表征所述第二中间点与所述第一中间点、所述第一移动距离以及所述第一方向矢量之间的关系。
48、可选地,所述中间点与所述指令点之间的约束函数关系包括:几何约束函数和代数约束函数;
49、所述几何约束函数用于表征所述第二中间点与所述指令点以及所述旋转关节的旋转关节轴线的方向矢量之间的几何关系;
50、所述代数约束函数用于表征所述第二中间点与所述指令点以及所述旋转关节轴线上的参考点之间的代数关系。
51、可选地,若所述旋转关节的旋转关节轴线不垂直于所述第二移动关节的第二关节轴线,且所述旋转关节轴线垂直于所述第一移动关节的第一关节轴线;则所述逆解函数关系为所述基准函数关系中所述第二移动距离相关的函数;
52、所述确定模块,具体用于根据所述逆解函数关系,确定所述第二移动距离;
53、根据所述第二移动距离、以及所述基准函数关系中所述第一移动距离与所述第二移动距离之间的函数关系,确定所述第一移动距离;
54、根据所述第二移动距离以及所述第一代数等式关系,确定所述第一中间点的值;
55、根据所述第一中间点的值、所述第一移动距离以及所述第二代数等式关系,确定所述第二中间点的值;
56、根据所述第二中间点的值、所述指令点以及预设的空间点与关节轴线之间的运动函数关系,确定所述关节转动角度的值。
57、可选地,若所述旋转关节的旋转关节轴线不垂直于所述第一移动关节的第一关节轴线,且所述旋转关节轴线垂直于所述第二移动关节的第二关节轴线;则所述逆解函数关系为所述基准函数关系中所述第一移动距离相关的函数;
58、所述确定模块,具体用于根据所述逆解函数关系,确定所述第一移动距离;
59、根据所述第一移动距离、以及所述基准函数关系中所述第一移动距离与所述第二移动距离之间的函数关系,确定所述第二移动距离;
60、根据所述第二移动距离以及所述第一代数等式关系,确定所述第一中间点的值;
61、根据所述第一中间点的值、所述第一移动距离以及所述第二代数等式关系,确定所述第二中间点的值;
62、根据所述第二中间点的值、所述指令点以及预设的空间点与关节轴线之间的运动函数关系,确定所述关节转动角度的值。
63、可选地,若所述旋转关节的旋转关节轴线不垂直于所述第一移动关节的第一关节轴线,且所述旋转关节轴线不垂直于所述第二移动关节的第二关节轴线;则所述逆解函数关系为所述基准函数关系中所述第二移动距离相关的函数;
64、所述确定模块,具体用于根据所述逆解函数关系,确定所述第二移动距离;
65、根据所述第二移动距离、以及所述基准函数关系中所述第一移动距离与所述第二移动距离之间的函数关系,确定所述第一移动距离;
66、根据所述第二移动距离以及所述第一代数等式关系,确定所述第一中间点的值;
67、根据所述第一中间点的值、所述第一移动距离以及所述第二代数等式关系,确定所述第二中间点的值;
68、根据所述第二中间点的值、所述指令点以及预设的空间点与关节轴线之间的运动函数关系,确定所述关节转动角度的值。
69、第三方面,本技术实施例提供了一种电子设备,包括:处理器、存储介质和总线,存储介质存储有处理器可执行的机器可读指令,当电子设备运行时,处理器与存储介质之间通过总线通信,处理器执行机器可读指令,以执行时执行如第一方面中提供的三关节机械臂运动控制方法的步骤。
70、第四方面,本技术实施例提供了一种计算机可读存储介质,该存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如第一方面提供的三关节机械臂运动控制方法的步骤。
71、本技术的有益效果是:
72、本技术提供一种三关节机械臂运动控制方法、装置、电子设备及存储介质,该方法通过机械臂当前所在的起始点、待运行至的指令点以及中间点和各关节的运动参数,进行数学建模,构建得到rtt构型的三关节机械臂的数学模型,并构建得到rtt构型的三关节机械臂对应的基准函数关系,基于基准函数关系,得到机械臂各关节轴线在不同位置关系下的逆解函数关系,从而根据逆解函数关系解析得到各关节的运动参数。由于基准函数关系是在rtt构型下根据关节关联参数唯一确定的,也即是根据旋转关节、第一移动关节和第二移动关节的关节参数进行确定,从而也唯一的确定了各关节轴线在不同位置关系下的逆解函数关系,通过各位置关系下的逆解函数关系进行各位置关系下的逆解解析,可分别解析得到旋转关节的关节转动角度、第一移动关节的移动距离以及第二移动关节的移动距离,从而根据解析结果进行rtt构型的三关节机械臂的运动控制。实现了rtt构型的三关节机械臂在多种情况下的逆解求解,使得三关节机械臂的逆解过程更加全面,且逆解效率较高逆解结果的准确性也较高。
- 还没有人留言评论。精彩留言会获得点赞!