一种基于视觉的机器人抓取定位系统及方法与流程
本发明属于智能机器人,具体涉及一种基于视觉的机器人抓取定位系统及方法。
背景技术:
1、现有的机器人抓取,通过视觉相机引导机械手对工件进行无序抓取,工件抓取后到2d相机下进行定位,以识别需加工的工作孔。工作孔识别后机械手将工件移动到下一加工位置,并使工作孔与预定位置对应。
2、上述技术需要提前设定好抓取路线和抓取位置,同时,也对工件的摆放有一定要求,当抓取部件摆放存在偏差时,便会抓取失败,大大降低了抓取的效率和准确率。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种基于视觉的机器人抓取定位系统及方法。
2、本发明的目的是通过以下技术方案来实现的:
3、第一方面,提供一种基于视觉的机器人抓取定位方法,包括以下步骤:
4、图像收集:采集抓取物图像,在抓取物图像上标注出可抓取位置和不可抓取位置,得到标注好的抓取物图像;
5、数据转换:对标注好的抓取物图像进行谱空间分析,并通过加窗傅里叶变换得到频谱图;
6、数据处理:对频谱图进行二值化处理并提取骨架,检测出频谱图中的抓取轨迹线,对检测出的抓取轨迹线进行数值拟合并计算轨迹线的斜率,所述斜率表示机器人抓取物着力点;
7、运动规划:对数据处理中获得的斜率进行加窗傅里叶逆变化得到机器人手臂起点-抓取点-终点之间的轨迹;
8、完成机器人抓取定位。
9、需要说明的是,还包括对抓取物图像进行标注的方法:
10、所述图像采集包括采集待抓取物标准图像和在同一垂位线不同相位的抓取物采集图像,将抓取物采集图像与采集物标准图像数据比对,与采集物标准图像中存在重合的抓取物采集图像记为待抓取模型,以及
11、根据抓取模型标注出可抓取位置和不可抓取位置。
12、进一步的,将抓取物采集图像和待抓取模型比对,抓取物采集图像上不存在待抓取物模型的区域标记为不可抓取位置,进行舍弃。
13、需要说明的是,所述数据处理还包括对频谱图进行空间分析的方法:抓取物图像在频谱中以光点形式呈现,对应光点出现的斜线为抓取物着力点,斜线斜率越趋近为0,表示该点适合抓取。
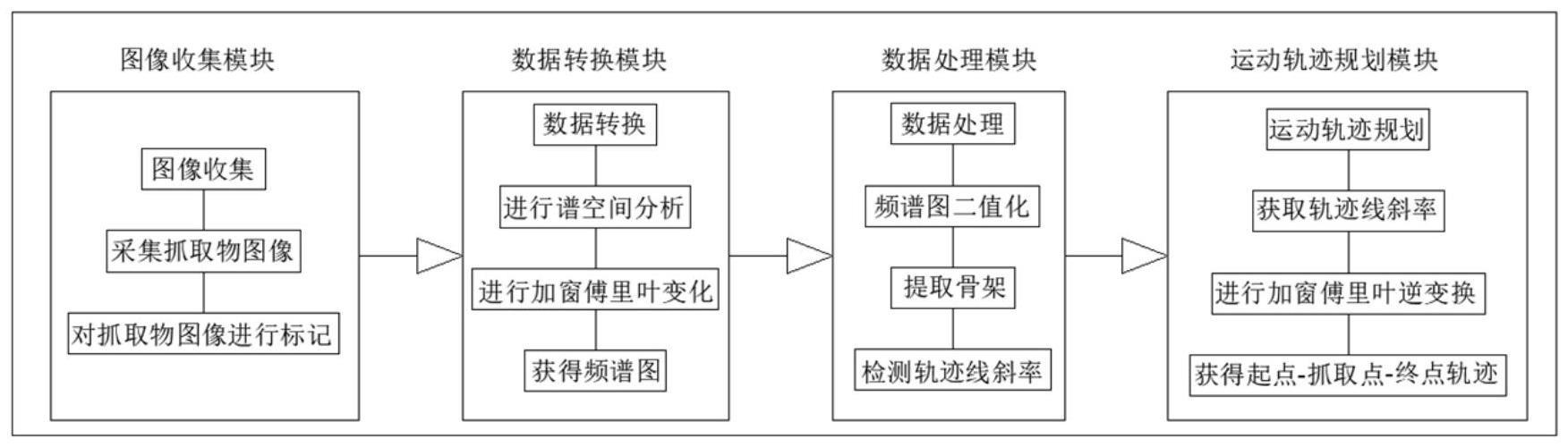
14、第二方面,一种基于视觉的机器人抓取定位系统,包括:
15、图像收集模块:用于对待抓取物进行图像采集,得到标记好的抓取物图像;
16、数据转换模块:用于将标注好的抓取物图像进行谱空间分析,并通过加窗傅里叶变换得到频谱图;
17、数据处理模块:用于计算抓取物的着力点;
18、运动轨迹规划模块:通过对着力点进行加窗傅里叶逆变换获得机器人手臂起点-抓取点-终点之间的轨迹。
19、进一步的,所述的图像收集模块还包括:
20、至少两台设置在同一垂线上的摄像装置。
21、为了更好的实现机器人抓取,还设置有数据处理终端,所述数据处理终端包括:
22、一个或多个存储器,用于存储指令;以及
23、一个或多个处理器,用于从所述存储器中调用并运行所述指令,执行第一方面中任意一项所述的一种基于视觉的机器人抓取定位方法。
24、进一步的,还包括计算机可读存储介质,所述计算机可读存储介质包括:
25、程序,当所述程序被处理器运行时,执行第一方面中任一项所述的一种基于视觉的机器人抓取定位方法。
26、第三方面,本申请提供了一种计算机程序产品,包括程序指令,当所述程序指令被计算设备运行时,如第一方面及第一方面任意可能的实现方式中所述的方法被执行。
27、第四方面,本申请提供了一种芯片系统,该芯片系统包括处理器,用于实现上述各方面中所涉及的功能,例如,生成,接收,发送,或处理上述方法中所涉及的数据和/或信息。
28、该芯片系统,可以由芯片构成,也可以包括芯片和其他分立器件。
29、在一种可能的设计中,该芯片系统还包括存储器,该存储器,用于保存必要的程序指令和数据。该处理器和该存储器可以解耦,分别设置在不同的设备上,通过有线或者无线的方式连接,或者处理器和该存储器也可以耦合在同一个设备上。
30、整体而言,本申请提供的一种基于视觉的机器人抓取定位方法,通过多角度对抓取物进行采集,大大提高了有限范围内抓取物定位的精准性,并通过筛选,对图像信息进行有效的标注,区分出可抓取位置和不可抓取位置,然后基于对图像进行频谱分析,计算并定位出抓取物的着力点,通过规划机器人手臂的运动轨迹,使机器人抓取具有更高的稳定性。
技术特征:
1.一种基于视觉的机器人抓取定位方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种基于视觉的机器人抓取定位方法,其特征在于:还包括对抓取物图像进行标注的方法:
3.根据权利要求2所述的一种基于视觉的机器人抓取定位方法,其特征在于:将抓取物采集图像和待抓取模型比对,抓取物采集图像上不存在待抓取物模型的区域标记为不可抓取位置,进行舍弃。
4.根据权利要求1所述的一种基于视觉的机器人抓取定位方法,其特征在于:所述数据处理还包括对频谱图进行空间分析的方法:抓取物图像在频谱中以光点形式呈现,对应光点出现的斜线为抓取物着力点,斜线斜率越趋近为0,表示该点越适合抓取。
5.一种基于视觉的机器人抓取定位系统,其特征在于:包括:
6.根据权利要求5所述的一种基于视觉的机器人抓取定位系统,其特征在于:所述的图像收集模块还包括:
7.根据权利要求5所述的一种基于视觉的机器人抓取定位系统,其特征在于:还包括数据处理终端,所述数据处理终端包括:
8.根据权利要求5所述的一种基于视觉的机器人抓取定位系统,其特征在于:还包括计算机可读存储介质,所述计算机可读存储介质包括:
技术总结
本发明属于智能机器人技术领域,具体公开了一种基于视觉的机器人抓取定位系统及方法,该系统包括图像收集模块,用于对待抓取物进行图像采集,并对抓取物图像进行标记,获得标记好的抓取物图像;数据转换模块,将标注好的抓取物图像进行谱空间分析,并通过加窗傅里叶变换得到频谱图;数据处理模块,通过对频谱图进行分析,获得机器人抓取的着力点;最后运动轨迹规划模块,通过对着力点进行加窗傅里叶逆变换获得机器人手臂起点‑抓取点‑终点之间的轨迹,通过上述模块的共同协作,有效提升机器人抓取效率。
技术研发人员:罗文骁,张均华,陈东辉
受保护的技术使用者:成都锐升科技有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!