一种基于数字孪生技术的巡检机器人控制方法和装置与流程
本技术涉及数字孪生,特别是涉及一种基于数字孪生技术的巡检机器人控制方法和装置。
背景技术:
1、楼宇内的建筑能源系统,包括暖通空调系统、变配电系统、照明系统、电梯系统的能源系统,其由各种设备、管线、末端设施组成了一个庞大复杂的系统。
2、传统是通过人工对楼宇进行巡检,需要人工定时巡检;这种巡检方式存在人员巡检难度大、耗时耗力、增加人力成本、容易漏检等问题;同时,人力无法长时间、不分时段的工作,容易巡检过程中产生懈怠。为了提高楼宇巡检的智能化,目前市场上又产生了巡检机器人,通过巡检机器人来对楼宇进行巡检,远程监控楼宇内的环境信息。
3、但是,通过这种巡检机器人巡检的方式,往往只能直接获取到巡检机器人自身所携带的传感器、摄像机等设备所采集到的数据;楼宇内很多需要抄表获取运行数据的设备可能由于设备设置位置不容易被拍清楚,或者设备设置位置比较隐蔽等原因,导致无法利用巡检机器人直接从外通过拍照识别读取到设备上的数据,这种情况下还是无法避免要依赖于人工抄表。
4、另外,目前这种利用巡检机器人巡检的方式,也无法实时直观、清楚地展示巡检机器人当前在楼宇中的具体巡检位置或巡检进度。
技术实现思路
1、基于此,针对上述技术问题,提供一种基于数字孪生技术的巡检机器人控制方法和装置,以解决现有技术存在的目前巡检机器人无法避免依赖于人工进行抄表的技术问题。
2、为了实现上述目的,本技术提供如下技术方案:
3、第一方面,一种基于数字孪生技术的巡检机器人控制方法,包括:
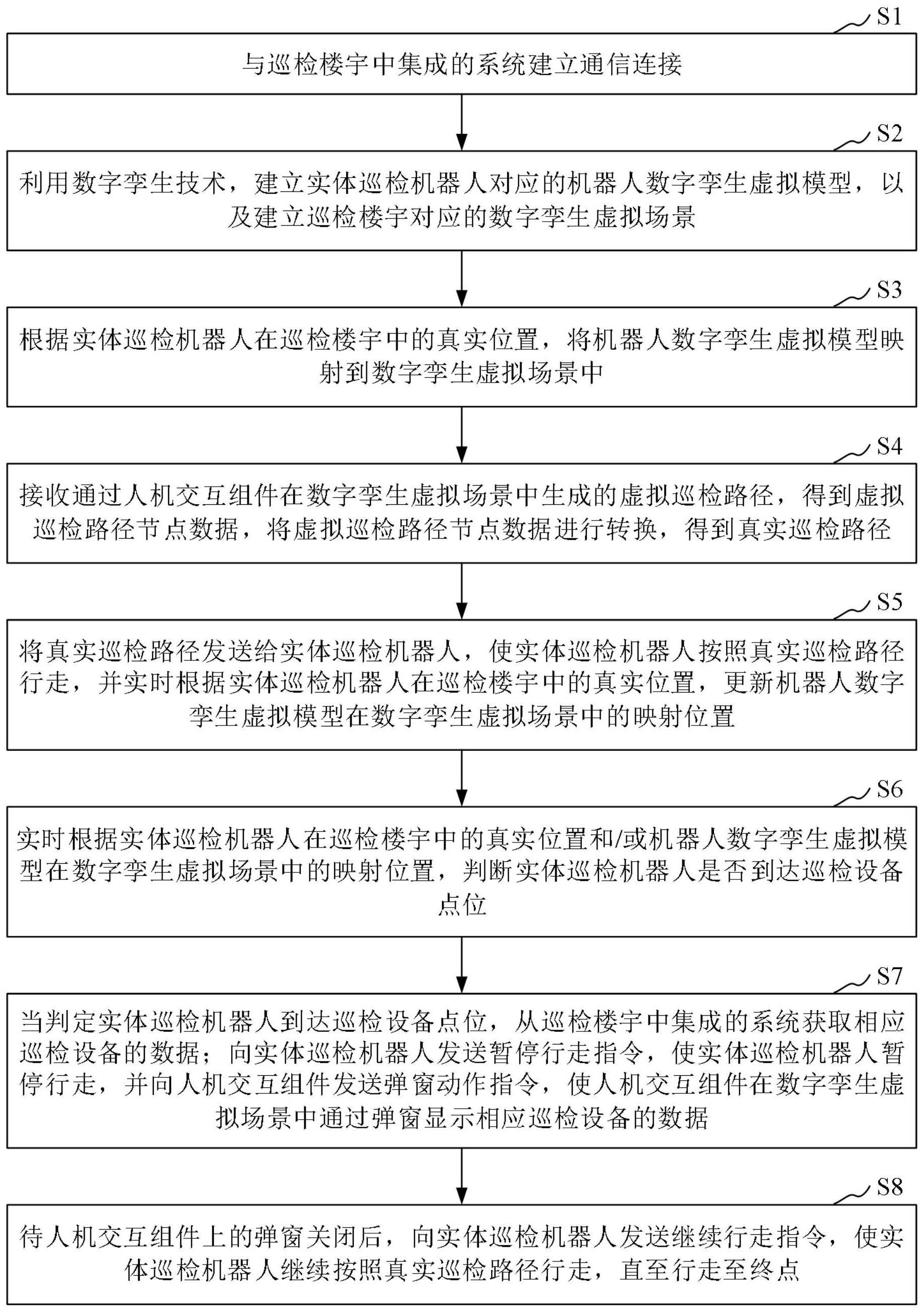
4、与巡检楼宇中集成的系统建立通信连接;
5、利用数字孪生技术,建立实体巡检机器人对应的机器人数字孪生虚拟模型,以及建立所述巡检楼宇对应的数字孪生虚拟场景;
6、根据所述实体巡检机器人在所述巡检楼宇中的真实位置,将所述机器人数字孪生虚拟模型映射到所述数字孪生虚拟场景中;
7、接收通过人机交互组件在所述数字孪生虚拟场景中生成的虚拟巡检路径,得到虚拟巡检路径节点数据,将所述虚拟巡检路径节点数据进行转换,得到真实巡检路径;
8、将所述真实巡检路径发送给所述实体巡检机器人,使所述实体巡检机器人按照所述真实巡检路径行走,并实时根据所述实体巡检机器人在所述巡检楼宇中的真实位置,更新所述机器人数字孪生虚拟模型在所述数字孪生虚拟场景中的映射位置;
9、实时根据所述实体巡检机器人在所述巡检楼宇中的真实位置和/或所述机器人数字孪生虚拟模型在所述数字孪生虚拟场景中的映射位置,判断所述实体巡检机器人是否到达巡检设备点位;
10、当判定所述实体巡检机器人到达巡检设备点位,从所述巡检楼宇中集成的系统获取相应巡检设备的数据;向所述实体巡检机器人发送暂停行走指令,使所述实体巡检机器人暂停行走,并向人机交互组件发送弹窗动作指令,使人机交互组件在所述数字孪生虚拟场景中通过弹窗显示相应巡检设备的数据;
11、待人机交互组件上的弹窗关闭后,向所述实体巡检机器人发送继续行走指令,使所述实体巡检机器人继续按照所述真实巡检路径行走,直至行走至终点。
12、可选地,所述巡检楼宇中集成的系统包括冷热源系统、空调末端系统、给水系统、排水系统、配电检测、ddc楼控系统、视频监控、门禁系统、电梯管理系统、环境品质系统和照明系统中的至少一个。
13、可选地,所述接收通过人机交互组件在所述数字孪生虚拟场景中生成的虚拟巡检路径包括:
14、使人机交互组件呈现映射有所述机器人数字孪生虚拟模型的所述数字孪生虚拟场景;
15、检测用户与所述人机交互组件的接触;
16、根据所述接触,识别所述实体巡检机器人对应的数字孪生虚拟模型在所述巡检楼宇对应的数字孪生虚拟场景中的移动路径;
17、响应于用户的确认动作,将所述移动路径作为虚拟巡检路径。
18、可选地,所述方法还包括:
19、接收所述虚拟巡检路径后,使人机交互组件在所述数字孪生虚拟场景中动态预览所述虚拟巡检路径的流动效果。
20、可选地,所述判断所述实体巡检机器人是否到达巡检设备点位包括:
21、根据所述实体巡检机器人在所述巡检楼宇中的真实位置和/或所述机器人数字孪生虚拟模型在所述数字孪生虚拟场景中的映射位置,判断所述实体巡检机器人当前是否正面某台巡检设备;
22、当判定所述实体巡检机器人当前正面某台巡检设备,根据所述实体巡检机器人在所述巡检楼宇中的真实位置和/或所述机器人数字孪生虚拟模型在所述数字孪生虚拟场景中的映射位置,判断所述实体巡检机器人与该巡检设备的距离和/或角度是否位于预设阈值内;
23、若判定所述实体巡检机器人与该巡检设备的距离和/或角度位于预设阈值内,则判定所述实体巡检机器人到达巡检设备点位。
24、可选地,所述方法还包括:
25、实时获取所述实体巡检机器人采集到的监控数据,使人机交互组件在所述数字孪生虚拟场景中展示所述监控数据;
26、接收通过人机交互组件输入的设备参数和/或设备控制指令,并将所述设备参数和/或设备控制指令发送给所述实体巡检机器人和/或所述巡检楼宇中集成的系统。
27、进一步可选地,所述监控数据包括视频监控数据、红外监控数据和空气质量监控数据。
28、第二方面,一种基于数字孪生技术的巡检机器人控制装置,包括:
29、通信建立模块,用于与巡检楼宇中集成的系统建立通信连接;
30、数字孪生模块,用于利用数字孪生技术,建立实体巡检机器人对应的机器人数字孪生虚拟模型,以及建立所述巡检楼宇对应的数字孪生虚拟场景;
31、映射模块,用于根据所述实体巡检机器人在所述巡检楼宇中的真实位置,将所述机器人数字孪生虚拟模型映射到所述数字孪生虚拟场景中;
32、巡检路径生成模块,用于接收通过人机交互组件在所述数字孪生虚拟场景中生成的虚拟巡检路径,得到虚拟巡检路径节点数据,将所述虚拟巡检路径节点数据进行转换,得到真实巡检路径;
33、巡检路径发送模块,用于将所述真实巡检路径发送给所述实体巡检机器人,使所述实体巡检机器人按照所述真实巡检路径行走,并实时根据所述实体巡检机器人在所述巡检楼宇中的真实位置,更新所述机器人数字孪生虚拟模型在所述数字孪生虚拟场景中的映射位置;
34、巡检设备点位判断模块,用于实时根据所述实体巡检机器人在所述巡检楼宇中的真实位置和/或所述机器人数字孪生虚拟模型在所述数字孪生虚拟场景中的映射位置,判断所述实体巡检机器人是否到达巡检设备点位;
35、弹窗动作模块,用于当判定所述实体巡检机器人到达巡检设备点位,从所述巡检楼宇中集成的系统获取相应巡检设备的数据;向所述实体巡检机器人发送暂停行走指令,使所述实体巡检机器人暂停行走,并向人机交互组件发送弹窗动作指令,使人机交互组件在所述数字孪生虚拟场景中通过弹窗显示相应巡检设备的数据;
36、巡检继续模块,用于待人机交互组件上的弹窗关闭后,向所述实体巡检机器人发送继续行走指令,使所述实体巡检机器人继续按照所述真实巡检路径行走,直至行走至终点。
37、第三方面,一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现第一方面中任一项所述的方法的步骤。
38、第四方面,一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现第一方面中任一项所述的方法的步骤。
39、本发明至少具有以下有益效果:
40、本发明实施例提供了一种基于数字孪生技术的巡检机器人控制方法中,一方面通过数字孪生技术,在虚拟空间中分别建立了实体巡检机器人所对应的机器人数字孪生虚拟模型以及巡检楼宇对应的数字孪生虚拟场景,并将机器人数字孪生虚拟模型映射到所述数字孪生虚拟场景中,另一方面通过将楼宇中集成的系统进行融合,使得在根据实体巡检机器人在巡检楼宇中的真实位置和/或机器人数字孪生虚拟模型在数字孪生虚拟场景中的映射位置判断出实体巡检机器人到达巡检设备点位时,能够直接从楼宇中集成的系统处获取实体巡检机器人所到达巡检设备的数据并进行弹窗显示,无需利用巡检机器人通过拍照的方式进行抄表,因此不会出现受限于巡检设备的设置位置而导致巡检机器人无法抄表的问题,能够完全不依赖于人工进行抄表。
41、通过本发明实施例所提供的方法,还可以在实体巡检机器人行走过程中,实时在数字孪生虚拟场景中更新机器人数字孪生虚拟模型的具体位置,使用户能够直观、清楚地了解到巡检机器人当前在楼宇中的具体巡检位置、巡检状态或巡检进度。
42、本发明实施例还提供了一种可视化编辑巡检路径的方法,能够在数字孪生虚拟场景中可视化编辑机器人数字孪生虚拟模型的虚拟巡检路径,进而控制实体巡检机器人按照相应路径行走。
- 还没有人留言评论。精彩留言会获得点赞!